Оцените движение между изображениями или видеокадрами
Computer Vision Toolbox / Analysis & Enhancement
Блок Block Matching оценивает движение между двумя изображениями или двумя видеокадрами путем сравнения блоков пикселей. Блок совпадает с блоком пикселей между системами координат путем перемещения блока пикселей по поисковой области.
Main Tab
Estimate motion between — Оцените движение между изображениями или системами координатCurrent frame and N-th frame back (значение по умолчанию) | Two imagesЗадайте, оценить ли движение между двумя изображениями или двумя видеокадрами. Выберите Two images оценить движение между двумя изображениями. Выберите Current frame and N-th frame back оценить движение между двумя видеокадрами, которые являются системами координат N независимо.
Установите этот параметр на Current frame and N-th frame back отсоединять параметр N.
N NumberOfFrames Задайте скалярное значение, которое представляет количество кадров между системой координат и текущей системой координат.
Чтобы включить этот параметр, установите параметр Estimate motion between на Current frame and N-th frame back.
Search method — Блокируйте метод поиска соответствияExhaustive (значение по умолчанию) | Three-stepЗадайте, как блок определяет местоположение блока пикселей в текущей системе координат и следующей системе координат что лучшие соответствия блок пикселей.
Exhaustive — Блок выбирает местоположение блока пикселей в следующей системе координат путем перемещения блока через поисковую область один пиксель за один раз. Этот процесс является в вычислительном отношении дорогим.
Three-step — Поиски блока для блока пикселей в следующей системе координат, что лучшие соответствия блок пикселей в текущей системе координат при помощи постоянно уменьшающегося размера шага. Блок начинается с размера шага, приблизительно равняются половине максимальной поисковой области значений. На каждом шаге блок сравнивает центральную точку поисковой области к восьми поисковым точкам, расположенным на контурах области, и перемещает центральную точку к поисковой точке, значения которой является самым близким к той из центральной точки. Блок затем уменьшает размер шага наполовину и начинает процесс снова. Эта опция является менее в вычислительном отношении дорогой, хотя она не может найти оптимальное решение.
Block matching criteria — Блокируйте соответствие с критериямиMean square error (MSE) (значение по умолчанию) | Mean absolute difference (MAD)Задайте, как блок измеряет подобие блока пикселей в текущей системе координат с блоком пикселей в следующей системе координат.
Если вы выбираете Mean square error (MSE), блок оценивает смещение центрального пикселя блока как значения, которые минимизируют это уравнение MSE:
В предыдущем уравнении B блок пикселей и s (x, y, k) обозначают пиксельное местоположение в (x, y) в системе координат k.
Если вы выбираете Mean absolute difference (MAD), блок Block Matching оценивает смещение центрального пикселя блока как значения, которые минимизируют это уравнение MAD:
Block size [height width] — Размер блокаЗадайте размер блока пикселей.
Overlap size [r c] — Блокируйте перекрытиеЗадайте перекрытие (в пикселях) двух подразделений входного изображения.
Maximum displacement [r c] — Максимальное смещениеЗадайте максимальное количество пикселей, которые любой центральный пиксель в блоке пикселей может переместить от изображения до изображения или системы координат к системе координат. Блок использует это значение, чтобы определить размер поисковой области.
Velocity output — Velocity выходMagnitude-squared (значение по умолчанию) | Horizontal and vertical components in complex formЗадайте выход. Если вы выбираете Magnitude-squared, блок выводит матрицу оптического потока, где каждый элемент находится в форме u2+v2. Если вы выбираете Horizontal and vertical components in complex form, блок выводит матрицу оптического потока, где каждый элемент находится в форме . Действительная часть каждого значения является горизонтальным скоростным компонентом, и мнимая часть каждого значения является вертикальным скоростным компонентом.
Data Types Tab
Для получения дополнительной информации на параметрах блоков фиксированной точки, смотрите, Задают Атрибуты Фиксированной точки для Блоков.
Типы данных |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
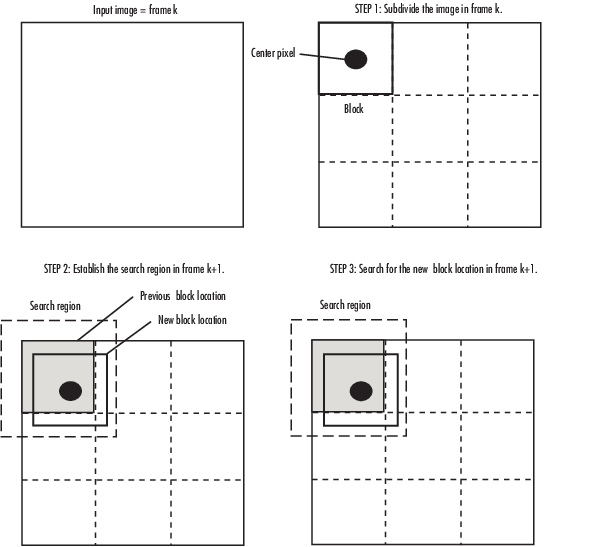
Предположим, что вход с блоком является системой координат k. Блок выполняет следующие шаги:
Подразделите систему координат с помощью значений для параметров Overlap size [r c] и Block size [height width]. В данном примере Overlap size [r c] равняется [0 0].
Для каждого подразделения или блока в системе координат k +1, поисковая область устанавливается на основе значения параметра Maximum displacement [r c].
Ищите новое местоположение блока с помощью любого Exhaustive или Three-step метод поиска.
Optical Flow | opticalFlow | opticalFlowHS | opticalFlowLK | opticalFlowLKDoG

