Выполните Гауссово разложение пирамиды
Преобразовывания
visiontransforms

Блок Gaussian Pyramid вычисляет Гауссово сокращение пирамиды или расширение, чтобы изменить размер изображения. Процесс сокращения изображений включает фильтрацию lowpass и субдискретизацию пикселей изображения. Процесс расширения изображений включает повышающую дискретизацию фильтрацию lowpass и пикселей изображения. Можно также использовать этот блок, чтобы создать Лапласовую пирамиду. Для получения дополнительной информации смотрите Примеры.
Примечание
Этот блок поддерживает интенсивность и цветные изображения на ее портах.
| Порт | Вывод | Поддерживаемые типы данных | Поддерживаемые комплексные числа |
|---|---|---|---|
Входной параметр | В В |
| Нет |
Вывод | В В | То же самое как Input port | Нет |
Используйте параметр Operation , чтобы задать, уменьшать ли или расширить входное изображение. Если вы выбираете Reduce, блок применяет фильтр lowpass и затем прореживает входное изображение. Если вы выбираете Expand, блок сверхдискретизировал и затем применяет фильтр lowpass к входному изображению.
Используйте параметр Pyramid level, чтобы задать число раз, блок сверхдискретизировал или прореживает каждую размерность изображения на коэффициент 2. Например, предположите, что у вас есть входное изображение 4 на 4. Вы устанавливаете параметр Operation на Reduce и Pyramid level к 1. Блок фильтрует и прореживает изображение и выводит пиксельное выходное изображение 2 на 2. Если у вас есть входное изображение M на n, и вы устанавливаете параметр Operation на Reduce, можно вычислить размерности выходного изображения с помощью следующего уравнения:
Необходимо повторить это вычисление для каждого последовательного уровня пирамиды. Если у вас есть входное изображение M на n, и вы устанавливаете параметр Operation на Expand, можно вычислить размерности выходного изображения с помощью следующего уравнения:
В предыдущем уравнении l является скалярным значением от 1 до inf то, что вы вводите для параметра Pyramid level.
Используйте параметр Coefficient source, чтобы задать коэффициенты фильтра lowpass. Если вы выбираете Default separable filter [1/4-a/2 1/4 a 1/4 1/4-a/2], используйте параметр a, чтобы задать коэффициенты в векторе из отделимых коэффициентов фильтра. Если вы выбираете Specify via dialog, используйте параметр Coefficient for separable filter, чтобы ввести вектор из отделимых коэффициентов фильтра.
Следующая модель в качестве примера показывает, как создать Лапласовую пирамиду:
Откройте эту модель путем ввода
в MATLAB® командная строка.
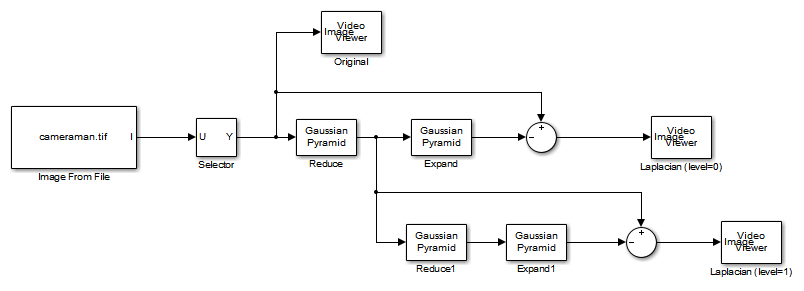
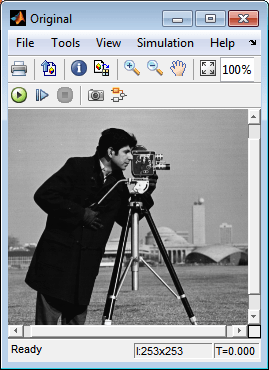
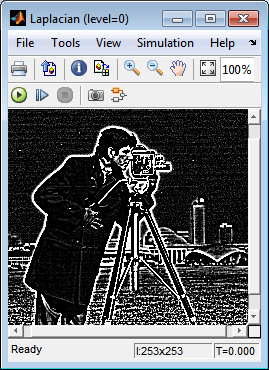
Запустите модель, чтобы видеть следующие результаты.
Можно создать Лапласовую пирамиду, если размерности входного изображения, R-by-C, удовлетворяют и , где MR, MC и N являются целыми числами. В этом примере у вас есть входная матрица, которая является 256 256. Если вы устанавливаете MR и MC, равный 63 и N, равный 2, вы находите, что входное изображение должно быть 253 253. Таким образом, вы используете блок Submatrix, чтобы обрезать размерности входного изображения к 253 253.
Следующая схема показывает типы данных, используемые в блоке Gaussian Pyramid для сигналов фиксированной точки:
Можно накрыть на содействующий стол, продукт выход, аккумулятор и типы выходных данных в маске блока.
Задайте, хотите ли вы уменьшать или расширить входное изображение.
Задайте число раз, блок сверхдискретизировал или прореживает каждую размерность изображения на коэффициент 2.
Определите, как задать коэффициенты фильтра lowpass. Вашим выбором является Default separable filter [1/4-a/2 1/4 a 1/4 1/4-a/2] или Specify via dialog.
Введите скалярное значение, которое задает коэффициенты в отделимом фильтре по умолчанию [1/4-a/2 1/4 a 1/4 1/4-a/2]. Этот параметр отображается, если для параметра Coefficient source вы выбираете Default separable filter [1/4-a/2 1/4 a 1/4 1/4-a/2].
Введите вектор из отделимых коэффициентов фильтра. Этот параметр отображается, если для параметра Coefficient source вы выбираете Specify via dialog.
Выберите округляющийся режим для операций фиксированной точки.
Выберите режим переполнения для операций фиксированной точки.
Выберите, как задать размер слова и дробную длину коэффициентов:
Когда вы выбираете Same word length as input, размер слова содействующего соответствия тот из входа с блоком. В этом режиме дробная длина коэффициентов автоматически установлена в двоичную точку, только масштабирующуюся, который предоставляет вам лучшую точность, возможную, учитывая значение и размер слова коэффициентов.
Когда вы выбираете Specify word length, можно ввести размер слова коэффициентов в битах. Блок автоматически устанавливает дробную длину давать вам лучшую точность.
Когда вы выбираете Binary point scaling, можно ввести размер слова и дробную длину коэффициентов в битах.
Когда вы выбираете Slope and bias scaling, можно ввести размер слова в битах и наклоне коэффициентов. Смещение всех сигналов в блоках Computer Vision Toolbox™ 0.
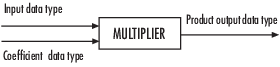
Как показано на предыдущем рисунке, выход множителя помещается в тип выходных данных продукта и масштабирование. Используйте этот параметр, чтобы задать, как назвать продукт выходным словом и дробными длинами.
Когда вы выбираете Same as input, эти характеристики совпадают с теми из входа с блоком.
Когда вы выбираете Binary point scaling, можно ввести размер слова и дробную длину продукта выход в битах.
Когда вы выбираете Slope and bias scaling, можно ввести размер слова в битах и наклоне продукта выход. Смещение всех сигналов в блоках Computer Vision Toolbox 0.
Как показано на предыдущем рисунке, входные параметры к аккумулятору брошены к типу данных аккумулятора. Выход сумматора остается в типе данных аккумулятора, когда каждый элемент входа добавляется к нему. Используйте этот параметр, чтобы задать, как определять слово аккумулятора и дробные длины.
Когда вы выбираете Same as product output, эти характеристики совпадают с теми из продукта выход.
Когда вы выбираете Same as input, эти характеристики совпадают с теми из входа с блоком.
Когда вы выбираете Binary point scaling, можно ввести размер слова и дробную длину аккумулятора в битах.
Когда вы выбираете Slope and bias scaling, можно ввести размер слова в битах и наклоне аккумулятора. Смещение всех сигналов в блоках Computer Vision Toolbox 0.
Выберите, как задать размер слова и дробная продолжительность выхода блока:
Когда вы выбираете Same as input, эти характеристики совпадают с теми из входа с блоком.
Когда вы выбираете Binary point scaling, можно ввести размер слова и дробная продолжительность выхода в битах.
Когда вы выбираете Slope and bias scaling, можно ввести размер слова в битах и наклоне выхода. Смещение всех сигналов в блоках Computer Vision Toolbox 0.
Выберите этот параметр, чтобы препятствовать тому, чтобы Fixed-Point Tool заменили типы данных, которые вы задаете на маске блока. Для получения дополнительной информации смотрите fxptdlg (Fixed-Point Designer), страница с описанием на Fixed-Point Tool в Simulink® документация.
Программное обеспечение Computer Vision Toolbox |
