В оборудовании, обрабатывая целый кадр данных одновременно имеет высокую стоимость в памяти и области. Чтобы сохранить ресурсы, последовательная обработка предпочтительна в проектах HDL. Блоки Wireless HDL Toolbox™ работают с одной выборкой за один раз, а не системой координат. Блоки принимают и возвращают данные как последовательный поток выборок и управляющих сигналов. Управляющие сигналы указывают на контуры системы координат. Протокол подражает характеристикам реальной системы, включая неактивные интервалы между выборками и системами координат.
Протокол управления использует сигналы начала и конца разграничить каждую систему координат и допустимый сигнал указать который выборки к процессу. Wireless HDL Toolbox, передающий демонстрационный протокол потоком, позволяет вам конфигурировать количество неактивных циклов между выборками и между системами координат. Неактивные циклы моделируют пульсирующий символ реальных систем.
Этот протокол допускает системы координат различных размеров, такой, как будто карлик или частичные системы координат вводят систему из-за изменений синхронизации.
Блокам, которые используют этот интерфейс, не нужен параметр конфигурации для точного формата кадра или неактивных интервалов. Кроме того, если вы изменяете синхронизацию входных данных для своего проекта, вы не должны обновлять каждый блок. Вместо этого обновите потоковую настройку однажды на шаге сериализации. Некоторые блоки все еще требуют, чтобы максимальный параметр формата кадра выделил ресурсы памяти.
При помощи демонстрационного интерфейса потоковой передачи с управляющими сигналами каждый блок Wireless HDL Toolbox запускает расчет на новом наборе выборок в начале сигнала. Расчеты на новой системе координат происходят, получает ли блок сигнал конца для предыдущей системы координат.
Протокол терпит незначительные ошибки синхронизации. Если количество допустимых и недопустимых циклов между сигналами начала и конца варьируется, блоки продолжают действовать правильно. Этот протокол делает систему эластичной к системам координат карлика и изменениям синхронизации.
Блоки энкодера Wireless HDL Toolbox требуют, чтобы минимум, между системами координат располагающий с интервалами, вместил вставку кодовых комбинаций. Турбо и сверточные блоки декодера требуют, чтобы предыдущая система координат декодировалась (утверждал сигнал конца системы координат), прежде чем следующая система координат прибудет. Полярное, LPDC и блоки энкодера и декодера RS обеспечивают сигнал указать, когда блок готов получить запуск новой системы координат.
Используйте блок Frame To Samples, чтобы преобразовать структурированные данные в поток выборок и управляющих сигналов, которые соответствуют этому протоколу. Управляющие сигналы сгруппированы в типе данных шины под названием samplecontrol.
Блок Frame To Samples может сериализировать системы координат фиксированного размера. Если ваши системы координат отличаются по размеру, используйте whdlFramesToSamples функционируйте, чтобы преобразовать структурированные данные в векторы из выборок и управляющих сигналов в MATLAB®. Затем импортируйте векторы к Simulink®. Используйте блок Sample Control Bus Creator, чтобы создать samplecontrol соедините шиной в своей модели.
Если ваши данные уже находятся в последовательном формате, спроектируйте свою собственную логику, чтобы сгенерировать эти управляющие сигналы из вашей существующей последовательной схемы управления.
Блоки Wireless HDL Toolbox имеют порт ввода и вывода, sample, для выборочных данных потоковой передачи. Блоки получают одну выборку за один раз от входа и производят одну выборку за один раз для выхода. Выборки могут быть одним из этих поддерживаемых типов данных.
| Порт | Описание | Тип данных |
|---|---|---|
sample |
Скалярное целочисленное значение, которое представляет одну выборку. Протокол также допускает вектор из целочисленных значений, которые представляют одну выборку, такой что касается закодированных турбо выборок. |
Поддерживаемые типы данных включают:
|
Блоки Wireless HDL Toolbox имеют порт ввода и вывода, ctrl, для сигналов управления кадром, относящихся к каждой выборке. Эти три управляющих сигнала указывают на валидность выборки и контуры системы координат. Порт управляющего сигнала является невиртуальным типом данных шины под названием samplecontrol. Для получения дополнительной информации типа данных шины, смотрите Демонстрационную Шину управления.
Схема синхронизации иллюстрирует передающий потоком демонстрационный протокол. Это показывает входной кадр с шестью выборками и эквивалентную последовательность сигналов данных и управления.

Входным кадром является ([1 2 3 4 5 6])', и сериализатор сконфигурирован, чтобы вставить неактивные циклы вокруг допустимых выборок:
Один неактивный цикл между выборками
Три неактивных цикла между системами координат
Одно значение, представляющее каждую выборку (выходной размер по умолчанию)
Можно задать эти параметры или при помощи блока Frame To Samples или при помощи whdlFramesToSamples функция.
Управляющие сигналы start и end 1 для первых и последних допустимых выборок системы координат, соответственно. valid сигнал 1 для каждой допустимой входной выборки. valid сигнал 0 для неактивных циклов, вставленных между выборками и между системами координат. Система координат с шестью выборками теперь представлена путем потоковой передачи данных более чем 15 циклов.
NR Polar Encoder, NR Polar Decoder, NR LDPC Encoder, NR LDPC Decoder и RS Decoder блокируются, каждый обеспечивает выходной сигнал, чтобы указать, когда блок готов получить запуск новой системы координат. Этот сигнал необходим, потому что эти блоки не могут принять новую систему координат на определенных этапах внутренних расчетов, и задержка тех этапов может меняться в зависимости от значений входных портов.
| Порт | Описание | Тип данных |
|---|---|---|
| nextFrame | Булев скаляр, который указывает, когда блок может принять запуск новой системы координат | Boolean |
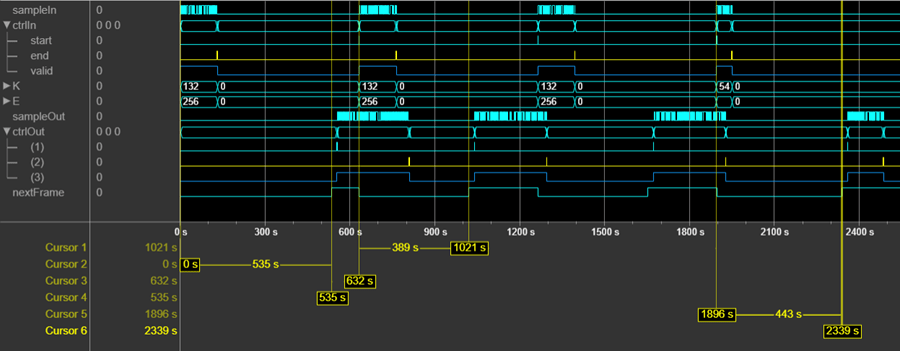
Эта форма волны показывает блок NR Polar Encoder, обрабатывающий несколько кадров. Выходным сигналом nextFrame является 0 когда блок обрабатывает данные и 1 когда блок готов получить запуск новой системы координат. Курсоры показывают задержку, меняющуюся в зависимости от значений значений порта входа K и E. Для первой системы координат с данным K и значениями E, блок должен определить побитовое отображение длины и информации сообщения для тех значений. Этот этап настройки означает, что блоку требуется некоторое время, прежде чем это будет готово принять следующий входной кадр. Для последующих систем координат с теми же значениями для K и E, блок готов раньше, потому что это не должно повторно вычислять настройку.
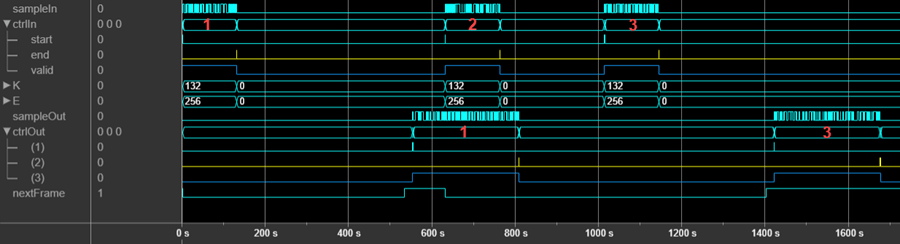
Если блок получает сигнал входа start, в то время как nextFrame является 0, блок отбрасывает происходящую систему координат и начинает обрабатывать новые данные. Эта форма волны показывает входной кадр NR Polar Encoder (3) примененный, когда nextFrame является 0. Блок отбрасывает происходящую систему координат (2) и обрабатывает новый кадр (3) как нормальный.
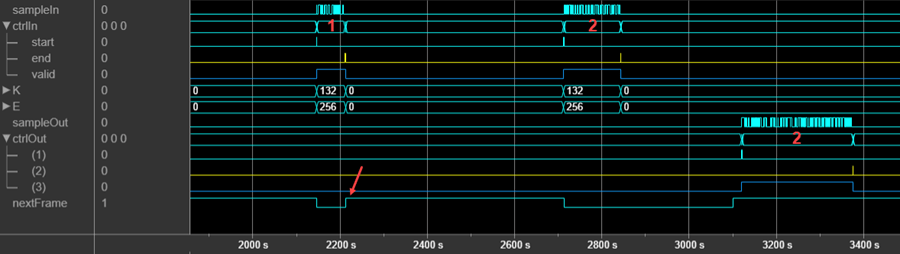
Если блок получает недопустимый входной кадр, например, если формат кадра не в поддерживаемой области значений, то блок устанавливает nextFrame на 1 один цикл после сигнала входа end. Это поведение указывает, что входной кадр отбрасывается. Эта форма волны показывает входной кадр NR Polar Encoder (1), которому не ожидали правильное количество отсчетов для сопроводительного K и значений E. Форма волны показывает набор сигнала nextFrame 1 сразу после сигнала входа end от системы координат 1. Блок отбрасывает происходящую систему координат (1) и обрабатывает новый кадр (2) как нормальный.