Компенсируйте смещение несущей частоты
Система comm.CarrierSynchronizer object™ компенсирует несущую частоту и смещения фазы в сигналах что схемы модуляции одно поставщика услуг использования. Алгоритм синхронизатора поставщика услуг совместим с BPSK, QPSK, OQPSK, 8-PSK, PAM и прямоугольными схемами модуляции QAM.
Этот Системный объект не разрешает неоднозначности фазы, созданные алгоритмом синхронизации. Примеры демонстрируют разрешение неоднозначности фазы.
Компенсировать частоту и фазу смещает в сигналах что схемы модуляции одно поставщика услуг использования:
Создайте объект comm.CarrierSynchronizer и установите его свойства.
Вызовите объект, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты? MATLAB.
carrSynch = comm.CarrierSynchronizercarrSynch = comm.CarrierSynchronizer(Name,Value)carrSynch = comm.CarrierSynchronizer
carrSynch = comm.CarrierSynchronizer(Name,Value)
Для версий ранее, чем R2016b, используйте функцию step, чтобы запустить алгоритм Системного объекта. Аргументы к step являются объектом, который вы создали, сопровождаемый аргументами, показанными в этом разделе.
Например, y = step(obj,x) и y = obj(x) выполняют эквивалентные операции.
[outSig,phErr] = carrSynch(inSig)Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Правильная фаза и смещения частоты сигнала QPSK прошли через канал AWGN. Используя преамбулы, неоднозначность фазы твердости.
Задайте параметры симуляции.
M = 4; % Modulation order rng(1993) % For repeatable results barker = comm.BarkerCode(... 'Length',13,'SamplesPerFrame',13); % For preamble msgLen = 1e4; numFrames = 10; frameLen = msgLen/numFrames;
Добавьте преамбулы в каждый кадр, которые используются позже при выполнении разрешения неоднозначности фазы. Сгенерируйте случайные символы данных и примените модуляцию QPSK.
preamble = (1+barker())/2; % Length 13, unipolar data = zeros(msgLen,1); for idx = 1 : numFrames payload = randi([0 M-1],frameLen-barker.Length,1); data((idx-1)*frameLen + (1:frameLen)) = [preamble; payload]; end modSig = pskmod(data,4,pi/4);
Создайте Систему comm.PhaseFrequencyOffset object™, чтобы ввести фазу и смещения частоты к модулируемому входному сигналу. Установите смещение фазы на степени 45, смещение частоты к 1 кГц и частоту дискретизации к 10 кГц. Смещение частоты установлено в 1% частоты дискретизации.
pfo = comm.PhaseFrequencyOffset('PhaseOffset',45, ... 'FrequencyOffset',1e4,'SampleRate',1e6);
Создайте Системный объект синхронизатора поставщика услуг, чтобы использовать для исправления фазы и смещений частоты с выборками на набор символов к 1.
carrierSync = comm.CarrierSynchronizer( ... 'SamplesPerSymbol',1,'Modulation','QPSK');
Примените фазу и смещения частоты с помощью Системного объекта pfo, и затем передайте сигнал через канал AWGN, чтобы добавить белый Гауссов шум.
modSigOffset = pfo(modSig); rxSig = awgn(modSigOffset,12);
Отобразите график рассеивания полученного сигнала. Данные появляются в кругу вместо того, чтобы быть сгруппированными вокруг ссылочных точек совокупности из-за смещения частоты.
scatterplot(rxSig)

Используйте Системный объект carrierSync, чтобы исправить фазу и смещение частоты в полученном сигнале.
syncSignal = carrierSync(rxSig);
Используйте схему совокупности, чтобы отобразить первые и последние 1 000 символов синхронизируемого сигнала. Перед сходимостью цикла синхронизатора нанесенные на график символы не сгруппированы вокруг ссылочных точек совокупности. После сходимости нанесенные на график символы сгруппированы вокруг ссылочных точек совокупности.
constDiag = comm.ConstellationDiagram( ... 'SymbolsToDisplaySource','Property','SymbolsToDisplay',300, ... 'ChannelNames',{'Before convergence','After convergence'},'ShowLegend',true, ... 'Position',[400 400 400 400]); constDiag([syncSignal(1:1000) syncSignal(9001:10000)]);

Демодулируйте синхронизируемый сигнал. Вычислите и отобразите общие битовые ошибки и BER.
syncData = pskdemod(syncSignal,4,pi/4); [syncDataTtlErr,syncDataBER] = biterr(data(6000:end),syncData(6000:end))
syncDataTtlErr = 3990
syncDataBER = 0.4986
Неоднозначность фазы в полученной силе сигнала вызывает битовые ошибки. Используя преамбулу, определите неоднозначность фазы. Удалите эту неоднозначность фазы из синхронизируемого сигнала уменьшать битовые ошибки.
idx = 9000 + (1:barker.Length); phOffset = angle(modSig(idx) .* conj(syncSignal(idx))); phOffset = round((2/pi) * phOffset); % -1, 0, 1, +/-2 phOffset(phOffset==-2) = 2; % Prep for mean operation phOffset = mean((pi/2) * phOffset); % -pi/2, 0, pi/2, or pi disp(['Estimated mean phase offset = ',num2str(phOffset*180/pi),' degrees'])
Estimated mean phase offset = 180 degrees
resPhzSig = exp(1i*phOffset) * syncSignal;
Демодулируйте сигнал после решения неоднозначности фазы. Повторно вычислите и отобразите обновленные общие битовые ошибки и BER. Удаление неоднозначности фазы уменьшает BER существенно.
resPhzData = pskdemod(resPhzSig,4,pi/4); [resPhzTtlErr, resPhzBER] = biterr(data(6000:end),resPhzData(6000:end))
resPhzTtlErr = 403
resPhzBER = 0.0504
Оцените смещение частоты, введенное в шумный сигнал 8-PSK использование Системы синхронизатора поставщика услуг object™.
Задайте параметры симуляции.
M = 8; % Modulation order fs = 1e6; % Sample rate (Hz) foffset = 1000; % Frequency offset (Hz) phaseoffset = 15; % Phase offset (deg) snrdb = 20; % Signal-to-noise ratio (dB)
Создайте Системный объект comm.PhaseFrequencyOffset, чтобы ввести фазу и смещения частоты к модулируемому сигналу.
pfo = comm.PhaseFrequencyOffset('PhaseOffset',phaseoffset, ... 'FrequencyOffset',foffset,'SampleRate',fs);
Создайте Системный объект синхронизатора поставщика услуг, чтобы использовать для исправления смещения частоты и фаза. Установите свойство Modulation на 8PSK.
carrierSync = comm.CarrierSynchronizer('Modulation','8PSK');
Сгенерируйте случайные данные и примените модуляцию 8-PSK.
data = randi([0 M-1],5000,1); modSig = pskmod(data,M,pi/M);
Примените фазу и смещения частоты с помощью pfo Системного объекта, и передайте сигнал через канал AWGN, чтобы добавить Гауссов белый шум.
modSigOffset = pfo(modSig); rxSig = awgn(modSigOffset,snrdb);
Используйте синхронизатор поставщика услуг, чтобы оценить смещение фазы полученного сигнала.
[~,phError] = carrierSync(rxSig);
Определите смещение частоты при помощи функции diff, чтобы вычислить аппроксимативную производную ошибки фазы. Производная должна масштабироваться потому что ошибка фазы измеряется в радианах.
estFreqOffset = diff(phError)*fs/(2*pi);
Постройте рабочее среднее значение предполагаемого смещения частоты. После того, как синхронизатор сходится к решению, среднее значение оценки приблизительно равно входному значению смещения частоты 1 000 Гц.
rmean = cumsum(estFreqOffset)./(1:length(estFreqOffset))'; plot(rmean) xlabel('Symbols') ylabel('Estimated Frequency Offset (Hz)') grid

Компенсация значительной фазы и смещений частоты для 16-QAM сигнала в канале AWGN выполняется на двух шагах. Во-первых, исправьте крупное смещение частоты с помощью оценки, обеспеченной крупным компенсатором частоты, и затем подстройте исправление с помощью синхронизации поставщика услуг. Из-за крупной коррекции частоты синхронизатор поставщика услуг сходится быстро даже при том, что нормированная пропускная способность установлена в низкую стоимость. Ниже нормированные значения пропускной способности включают лучшее исправление для маленьких остаточных смещений поставщика услуг. После применения фазы и частоты смещает исправления к полученному сигналу, неоднозначность фазы твердости с помощью преамбул.
Задайте параметры симуляции.
fs = 10000; % Sample rate (Hz) sps = 4; % Samples per symbol M = 16; % Modulation order k = log2(M); % Bits per symbol rng(1996) % Set seed for repeatable results barker = comm.BarkerCode(... 'Length',13,'SamplesPerFrame',13); % For preamble msgLen = 1e4; numFrames = 10; frameLen = msgLen/numFrames;
Сгенерируйте полезные нагрузки данных и добавьте преамбулу в каждый кадр. Преамбула позже используется для разрешения неоднозначности фазы.
preamble = (1+barker())/2; % Length 13, unipolar data = zeros(msgLen, 1); for idx = 1 : numFrames payload = randi([0 M-1],frameLen-barker.Length,1); data((idx-1)*frameLen + (1:frameLen)) = [preamble; payload]; end
Создайте Системный объект для фильтрации формы импульса передачи, получить импульсной фильтрации формы, крупной компенсации частоты QAM, синхронизации поставщика услуг и схемы совокупности.
txFilter = comm.RaisedCosineTransmitFilter( ... 'OutputSamplesPerSymbol',sps); rxFilter = comm.RaisedCosineReceiveFilter(... 'InputSamplesPerSymbol',sps,'DecimationFactor',sps); coarse = comm.CoarseFrequencyCompensator('SampleRate',fs, ... 'FrequencyResolution',10); fine = comm.CarrierSynchronizer( ... 'DampingFactor',0.4,'NormalizedLoopBandwidth',0.001, ... 'SamplesPerSymbol',1,'Modulation','QAM'); axislimits = [-6 6]; constDiagram = comm.ConstellationDiagram('ReferenceConstellation',qammod(0:M-1,M), ... 'ChannelNames',{'Before convergence','After convergence'}, ... 'ShowLegend',true,'XLimits',axislimits,'YLimits',axislimits);
Также создайте Системный объект для канала AWGN, и фазу и смещение частоты, чтобы добавить нарушения в сигнал. Смещение фазы, больше, чем 90 градусов, добавляется, чтобы вызвать неоднозначность фазы, которая приводит к сдвигу квадранта совокупности.
ebn0 = 8; freqoffset = 110; phaseoffset = 110; awgnChannel = comm.AWGNChannel('EbNo',ebn0, ... 'BitsPerSymbol',k,'SamplesPerSymbol',sps); pfo = comm.PhaseFrequencyOffset('FrequencyOffset',freqoffset, ... 'PhaseOffset',phaseoffset,'SampleRate',fs);
Сгенерируйте случайные символы данных, примените 16-QAM модуляцию и передайте модулируемый сигнал через формирующий фильтр импульса передачи.
txMod = qammod(data,M); txSig = txFilter(txMod);
Примените фазу и смещения частоты с помощью Системного объекта pfo, и затем передайте сигнал через канал AWGN, чтобы добавить белый Гауссов шум.
txSigOffset = pfo(txSig); rxSig = awgnChannel(txSigOffset);
Крупный Системный объект компенсатора частоты обеспечивает грубое исправление для смещения частоты. Для условий в этом примере, исправляя смещение частоты полученного исправления сигнала к в 10 Гц переданного сигнала достаточно.
syncCoarse = coarse(rxSig);
Передайте сигнал через получить импульсный формирующий фильтр и примените прекрасную коррекцию частоты.
rxFiltSig = fine(rxFilter(syncCoarse));
Отобразите схему совокупности первых и последних 1 000 символов в сигнале. Перед сходимостью цикла синхронизации спиральная природа схемы указывает, что смещение частоты не исправляется. После того, как синхронизатор поставщика услуг сходился к решению, символы выравниваются со ссылочной совокупностью.
constDiagram([rxFiltSig(1:1000) rxFiltSig(9001:end)])

Демодулируйте сигнал. Объясните задержку сигнала, вызванную передачей, и получите фильтры, чтобы выровнять полученные данные с передаваемыми данными. Вычислите и отобразите общие битовые ошибки и BER. При проверке битовых ошибок используйте более поздний фрагмент полученного сигнала быть уверенными, что цикл синхронизации сходился.
rxData = qamdemod(rxFiltSig,M);
delay = (txFilter.FilterSpanInSymbols + rxFilter.FilterSpanInSymbols) / 2;
idxSync = 2000; % Check BER for the received signal after the synchronization loop has converged
[syncDataTtlErr,syncDataBER] = biterr(data(idxSync:end-delay),rxData(idxSync+delay:end))syncDataTtlErr = 16116
syncDataBER = 0.5042
В зависимости от случайных используемых данных могут быть битовые ошибки, следующие из неоднозначности фазы в полученном сигнале после того, как цикл синхронизации будет сходиться и будет блокировать. В этом случае можно использовать преамбулу, чтобы определить и затем удалить неоднозначность фазы из синхронизируемого сигнала уменьшать битовые ошибки. Если неоднозначность фазы минимальна, количество битовых ошибок может быть неизменным.
idx = 9000 + (1:barker.Length); phOffset = angle(txMod(idx) .* conj(rxFiltSig(idx+delay))); phOffsetEst = mean(phOffset); disp(['Phase offset = ',num2str(rad2deg(phOffsetEst)),' degrees'])
Phase offset = -90.1401 degrees
resPhzSig = exp(1i*phOffsetEst) * rxFiltSig;
Демодулируйте сигнал после решения неоднозначности фазы. Повторно вычислите общие битовые ошибки и BER.
resPhzData = qamdemod(resPhzSig,M); [resPhzTtlErr,resPhzBER] = biterr(data(idxSync:end-delay),resPhzData(idxSync+delay:end))
resPhzTtlErr = 5
resPhzBER = 1.5643e-04
Образцовые нарушения канала, такие как синхронизация смещения фазы, смещения несущей частоты и фазы поставщика услуг смещаются для сигнала минимального манипулирования сдвига (MSK). Используйте comm.MSKTimingSynchronizer и Системные объекты comm.CarrierSynchronizer, чтобы синхронизировать такие сигналы в получателе. Синхронизатор синхронизации MSK восстанавливает смещение синхронизации, в то время как синхронизатор поставщика услуг восстанавливает смещения фазы и несущая частота.
Инициализируйте системные переменные путем выполнения configureMSKSignalRecoveryEx скрипта MATLAB. Задайте логическую контрольную переменную recoverTimingPhase, чтобы позволить синхронизировать восстановление фазы и recoverCarrier, чтобы включить восстановление фазы и несущая частота.
configureMSKSignalRecoveryEx; recoverTimingPhase = true; recoverCarrier = true;
Моделирование нарушений канала
Задайте демонстрационную задержку, timingOffset, что модель канала применяется. Создайте переменный дробный объект задержки ввести задержку синхронизации с переданным сигналом.
timingOffset = 0.2; varDelay = dsp.VariableFractionalDelay;
Создайте Системный объект comm.PhaseFrequencyOffset, чтобы ввести фазу поставщика услуг и смещения частоты к модулируемому сигналу. Поскольку модулятор MSK сверхдискретизировал переданные символы, установите свойство SampleRate на отношение samplesPerSymbol и шага расчета, Ts.
freqOffset = 50; phaseOffset = 30; pfo = comm.PhaseFrequencyOffset(... 'FrequencyOffset',freqOffset, ... 'PhaseOffset',phaseOffset, ... 'SampleRate',samplesPerSymbol/Ts);
Создайте Системный объект comm.AWGNChannel, чтобы добавить белый Гауссов шум в модулируемый сигнал. Шумовая степень определяется свойством EbNo, которое является энергией, подведенной к долоту к шумовой степени спектральное отношение плотности. Поскольку модулятор MSK генерирует символы с 1 ваттом мощности, установите свойство степени сигнала Системного объекта канала AWGN к 1.
EbNo = 20 + 10*log10(samplesPerSymbol); chAWGN = comm.AWGNChannel(... 'NoiseMethod','Signal to noise ratio (Eb/No)', ... 'EbNo',EbNo,... 'SignalPower',1, ... 'SamplesPerSymbol',samplesPerSymbol);
Синхронизируя фазу, несущую частоту и синхронизацию фазы поставщика услуг
Создайте синхронизатор синхронизации MSK, чтобы восстановить фазу синхронизации символа с помощью метода нелинейности четвертого порядка.
timeSync = comm.MSKTimingSynchronizer(... 'SamplesPerSymbol',samplesPerSymbol, ... 'ErrorUpdateGain',0.02);
Создайте синхронизатор поставщика услуг, чтобы восстановить и несущую частоту и фазу. Поскольку совокупность MSK является QPSK со смещением фазы с 0 степенями, установите comm.CarrierSynchronizer соответственно.
phaseSync = comm.CarrierSynchronizer(... 'Modulation','QPSK', ... 'ModulationPhaseOffset','Custom', ... 'CustomPhaseOffset',0, ... 'SamplesPerSymbol',1);
Потоковый цикл обработки
Симуляция модулирует данные с помощью модуляции MSK. Модулируемые символы проходят через модель канала, которая применяет задержку синхронизации, несущую частоту и сдвиг фазы и аддитивный белый Гауссов шум. Получатель выполняет фазу синхронизации и восстановление фазы и несущую частоту. Наконец, символы сигнала демодулируются, и частота ошибок по битам вычисляется. Скрипт plotResultsMSKSignalRecoveryEx генерирует графики рассеивания в этом порядке показать эти эффекты:
Нарушения канала
Синхронизация синхронизации
Синхронизация поставщика услуг
В конце симуляции пример отображает фазу синхронизации, частоту и оценки фазы как функция времени симуляции.
for p = 1:numFrames %------------------------------------------------------------------------ % Generate and modulate data %------------------------------------------------------------------------ txBits = randi([0 1],samplesPerFrame,1); txSym = modem(txBits); %------------------------------------------------------------------------ % Transmit through channel %------------------------------------------------------------------------ % % Add timing offset rxSigTimingOff = varDelay(txSym,timingOffset*samplesPerSymbol); % % Add carrier frequency and phase offset rxSigCFO = pfo(rxSigTimingOff); % % Pass the signal through an AWGN channel rxSig = chAWGN(rxSigCFO); % % Save the transmitted signal for plotting plot_rx = rxSig; % %------------------------------------------------------------------------ % Timing recovery %------------------------------------------------------------------------ if recoverTimingPhase % Recover symbol timing phase using fourth-order nonlinearity % method [rxSym,timEst] = timeSync(rxSig); % Calculate the timing delay estimate for each sample timEst = timEst(1)/samplesPerSymbol; else % Do not apply timing recovery and simply downsample the received % signal rxSym = downsample(rxSig,samplesPerSymbol); timEst = 0; end % Save the timing synchronized received signal for plotting plot_rxTimeSync = rxSym; %------------------------------------------------------------------------ % Carrier frequency and phase recovery %------------------------------------------------------------------------ if recoverCarrier % The following script applies carrier frequency and phase recovery % using a second order phase-locked loop (PLL), and removes phase ambiguity [rxSym,phEst] = phaseSync(rxSym); removePhaseAmbiguityMSKSignalRecoveryEx; freqShiftEst = mean(diff(phEst)/(Ts*2*pi)); phEst = mod(mean(phEst),360); % in degrees else freqShiftEst = 0; phEst = 0; end % Save the phase synchronized received signal for plotting plot_rxPhSync = rxSym; %------------------------------------------------------------------------ % Demodulate the received symbols %------------------------------------------------------------------------ rxBits = demod(rxSym); %------------------------------------------------------------------------ % Calculate the bit error rate %------------------------------------------------------------------------ errorStats = BERCalc(txBits,rxBits); %------------------------------------------------------------------------ % Plot results %------------------------------------------------------------------------ plotResultsMSKSignalRecoveryEx; end



Отобразите частоту ошибок по битам и общее количество символов, обработанных калькулятором коэффициента ошибок.
BitErrorRate = errorStats(1) TotalNumberOfSymbols = errorStats(3)
BitErrorRate =
4.0001e-06
TotalNumberOfSymbols =
499982
Заключение и дальнейшее экспериментирование
Алгоритмы восстановления продемонстрированы при помощи графиков совокупности, взятых после синхронизации, несущей частоты и синхронизации фазы поставщика услуг.
Откройте скрипт, чтобы создать перезаписываемую копию этого примера и его вспомогательных файлов. Затем чтобы показать эффекты алгоритмов восстановления, можно включить и отключить логические контрольные переменные recoverTimingPhase и recoverCarrier и повторно выполнить симуляцию.
Приложение
Этот пример использует эти скрипты:
configureMSKSignalRecoveryEx
plotResultsMSKSignalRecoveryEx
removePhaseAmbiguityMSKSignalRecoveryEx
Системный объект comm.CarrierSynchronizer является компенсатором с обратной связью, который использует основанный на PLL алгоритм, описанный в [1]. Вывод синхронизатора, y n, является переключенной частотой версией комплексного входного сигнала, x n, для энной выборки. Синхронизатор вывод
где λ n является вывод прямого цифрового синтезатора (DDS). DDS является версией дискретного времени управляемого напряжением осциллятора и является базовым компонентом замкнутых циклов фазы дискретного времени. В контексте этого Системного объекта DDS работает фильтром интегрирования.
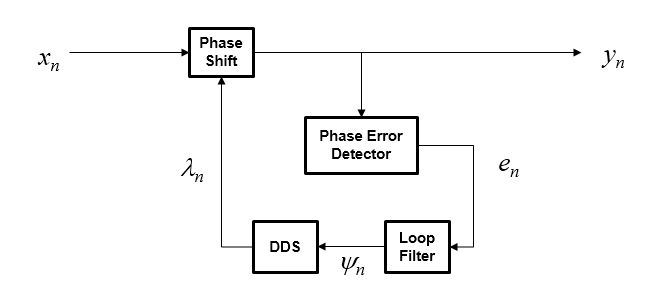
Чтобы исправить для смещения частоты, сначала алгоритм определяет ошибку фазы, e n. Значение ошибки фазы зависит от схемы модуляции.
| Модуляция | Ошибка фазы |
|---|---|
| QAM или QPSK |
Для подробного описания этого уравнения см. [1]. |
| BPSK или PAM |
Для подробного описания этого уравнения см. [1]. |
| С 8 PSK | Для подробного описания этого уравнения см. [2]. |
| OQPSK |
|
Чтобы гарантировать устойчивость системы, ошибка фазы проходит через биквадратный контурный фильтр, которым управляют
где ψ n является вывод контурного фильтра на выборке n и g, я - усиление интегратора. Усиление интегратора определяется от уравнения
где θ, d, K 0 и K p определяются из свойств Системного объекта. А именно,
где B n является нормированной пропускной способностью цикла, и ζ является фактором затухания. Усиление восстановления фазы, K 0, равно количеству выборок на символ. Тип модуляции определяет усиление детектора ошибок фазы, K p.
| Модуляция | K p |
|---|---|
| BPSK, PAM, QAM, QPSK или OQPSK | 2 |
| С 8 PSK | 1 |
Вывод контурного фильтра затем передается DDS. DDS является другим биквадратным контурным фильтром, выражение которого основано на прямом Эйлеровом правиле интегрирования
где g P является пропорциональным усилением, которое выражается как
Функция объекта info этого Системного объекта возвращает оценки нормированного получения по запросу - в области значений, максимальной задержке блокировки частоты и максимальной задержке блокировки фазы. Нормированное получение по запросу - в области значений, (Δf) получение по запросу - в, выражается в радианах и оценивается как
Выражение для (Δf) получение по запросу - в становится менее точным как подходы 1.
Максимальная задержка блокировки частоты, T FL и задержка блокировки фазы, T PL, выражается в выборках и оценивается как
[1] Рис, M. Цифровая связь: Подход Дискретного времени. Верхний Сэддл-Ривер, NJ: Prentice Hall, 2009, стр 359–393.
[2] Zhijie, H., И. Чжицян, Цз. Мин и В. Куан. “8PSK Демодуляция для Нового поколения DVB-S2”. 2 004 Международных конференции по вопросам Коммуникаций, Схем и Систем. Издание 2, 2004, стр 1447–1450.
