Этот пример показывает, как разработать две степени свободы (2-DOF) ПИД-регулятор с помощью PID Tuner. Пример также сравнивает контроллер 2-DOF производительность с производительностью, достигнутой с ПИД-регулятором 1-DOF.
В этом примере вы представляете объект как модель LTI. Для получения информации об использовании PID Tuner, чтобы настроить блок PID Controller (2DOF) в модели Simulink®, см. Проект Два ПИД-регулятора Степени свободы (Simulink Control Design).
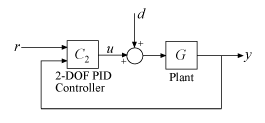
ПИД-регуляторы 2-DOF включают взвешивание заданного значения на пропорциональных и производных условиях. По сравнению с ПИД-регулятором 1-DOF ПИД-регулятор 2-DOF может достигнуть лучшего подавления помех без значительного увеличения перерегулирования в отслеживании заданного значения. Типичную архитектуру управления с помощью ПИД-регулятора 2-DOF показывают в следующей схеме.
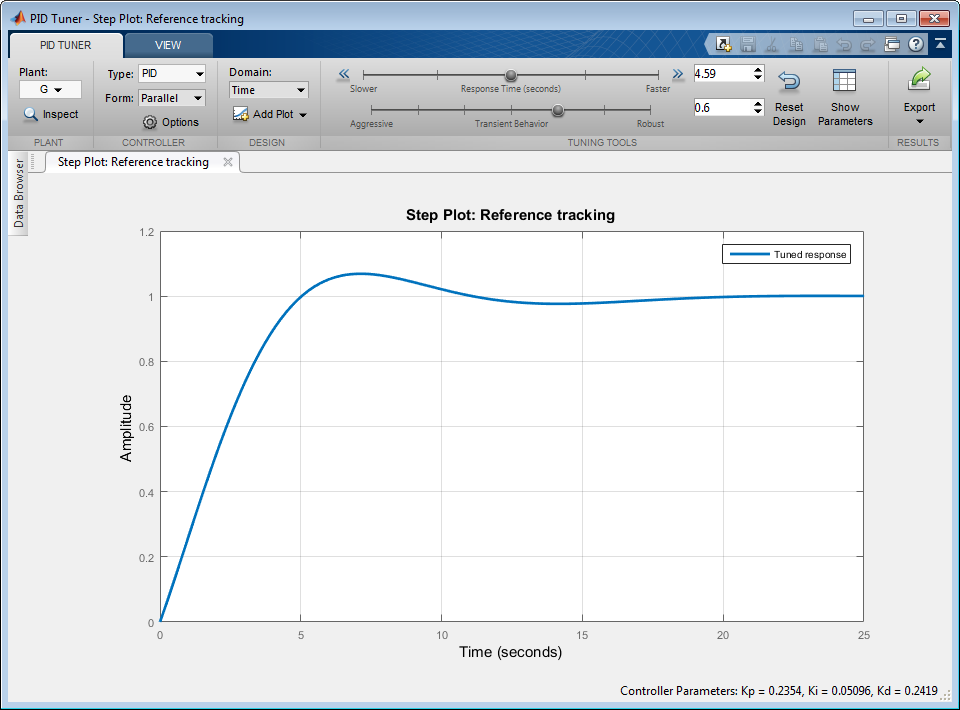
В данном примере первый проект контроллер 1-DOF для объекта, данного:
G = tf(1,[1 0.5 0.1]); pidTuner(G,'PID')
Предположим для этого примера, что ваше приложение требует более быстрого ответа, чем проект начальной буквы PID Tuner. В текстовом поле рядом с ползунком Response Time войдите 2.
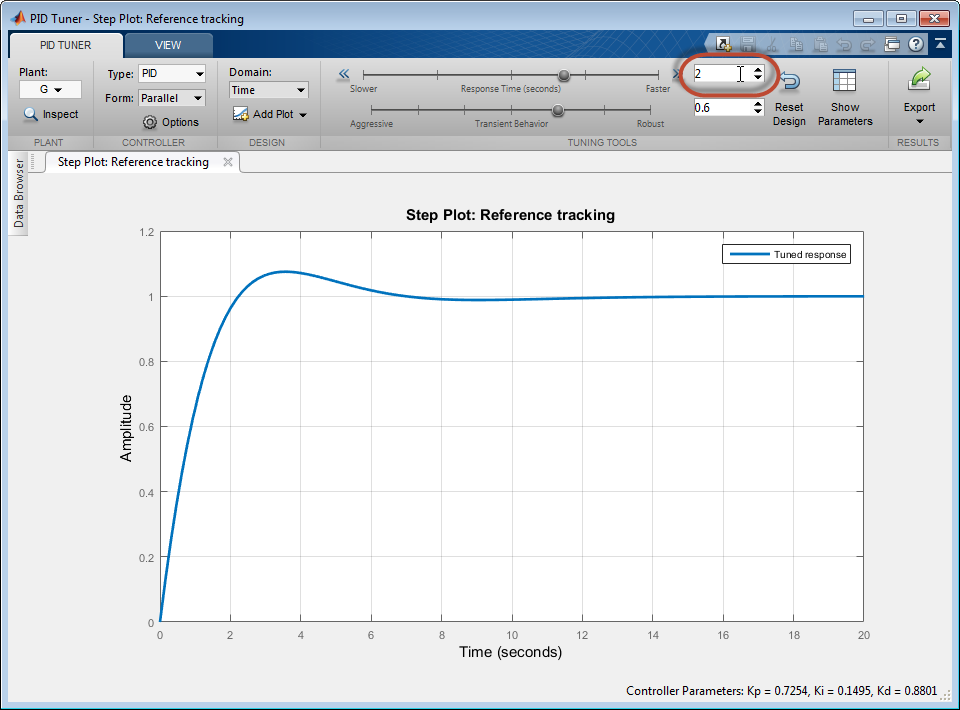
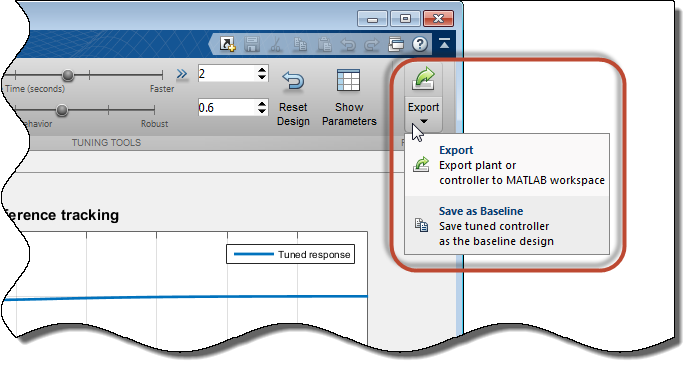
Получившийся ответ быстр, но имеет значительную сумму перерегулирования. Разработайте контроллер 2-DOF, чтобы улучшить перерегулирование. Во-первых, установите контроллер 1-DOF как базовый контроллер для сравнения. Кликните по стрелке Export![]() и выберите
и выберите Save as Baseline.
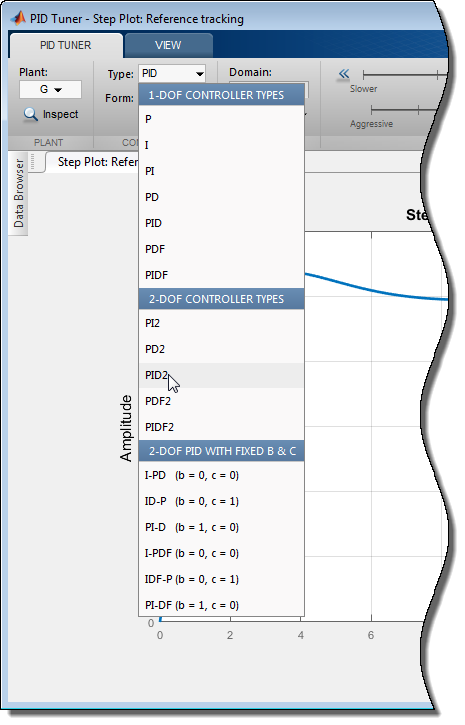
Разработайте контроллер 2-DOF. В меню Type выберите PID2.
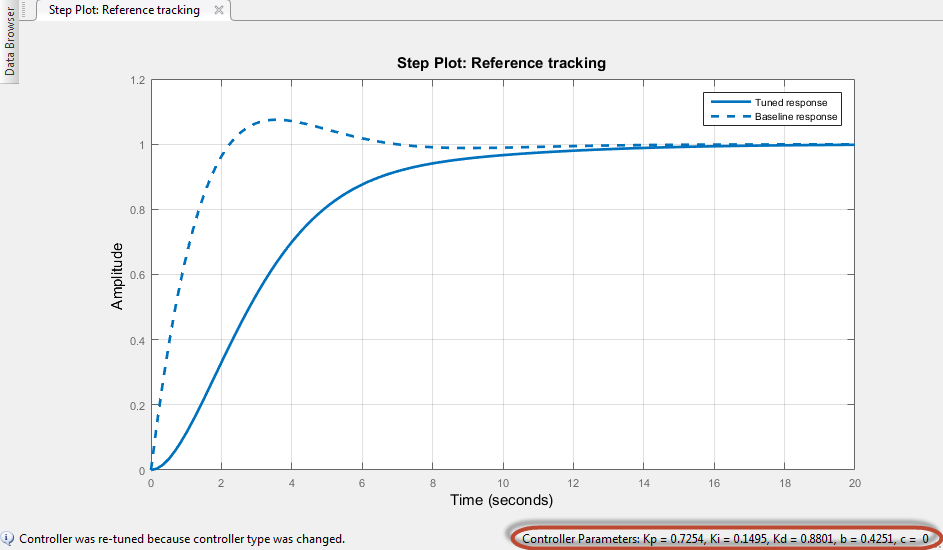
PID Tuner генерирует контроллер 2-DOF с тем же целевым временем отклика. Параметры контроллера отобразились на правом нижнем показе, что PID Tuner настраивает все коэффициенты контроллера, включая веса заданного значения b и c, чтобы сбалансировать производительность и робастность. Сравните контроллер 2-DOF производительность (сплошная линия) с производительностью контроллера 1-DOF, который вы сохранили как базовая линия (пунктирная линия).
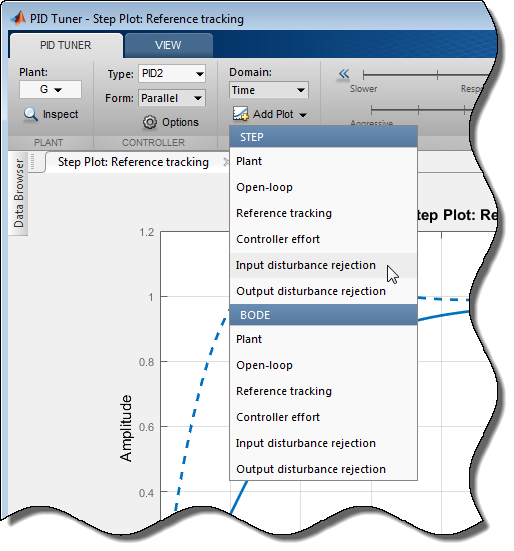
Добавление второй степени свободы устраняет перерегулирование в ответе отслеживания уставки. Затем, добавьте переходный процесс, чтобы сравнить производительность подавления помех этих двух контроллеров. Выберите Add Plot> Input Disturbance Rejection.
PID Tuner размещает график подавления помех рядом бок о бок с графиком отслеживания уставки.
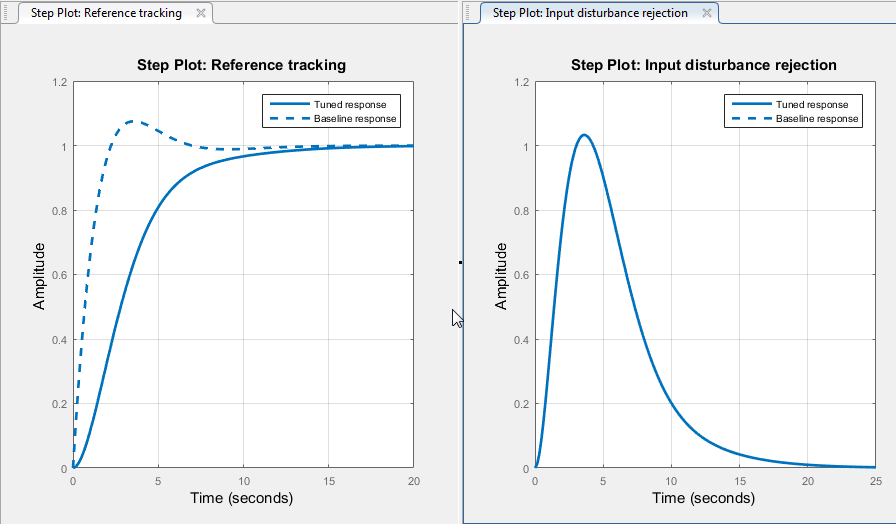
Производительность подавления помех идентична с обоими контроллерами. Таким образом использование контроллера 2-DOF устраняет перерегулирование отслеживания уставки бесплатно к подавлению помех.
Можно улучшить подавление помех также путем изменения особого внимания проекта PID Tuner. Во-первых, кликните по стрелке Export![]() и выберите
и выберите Save as Baseline снова, чтобы установить контроллер 2-DOF как базовую линию для сравнения.
Измените особое внимание проекта PID Tuner, чтобы способствовать отслеживанию уставки, не изменяя время отклика или коэффициент переходного поведения. Для этого нажмите![]() Options, и в меню Focus, выберите
Options, и в меню Focus, выберите Input disturbance rejection.
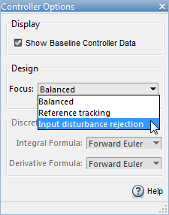
PID Tuner автоматически повторно настраивает коэффициенты контроллера с особым вниманием на производительности подавления помех.
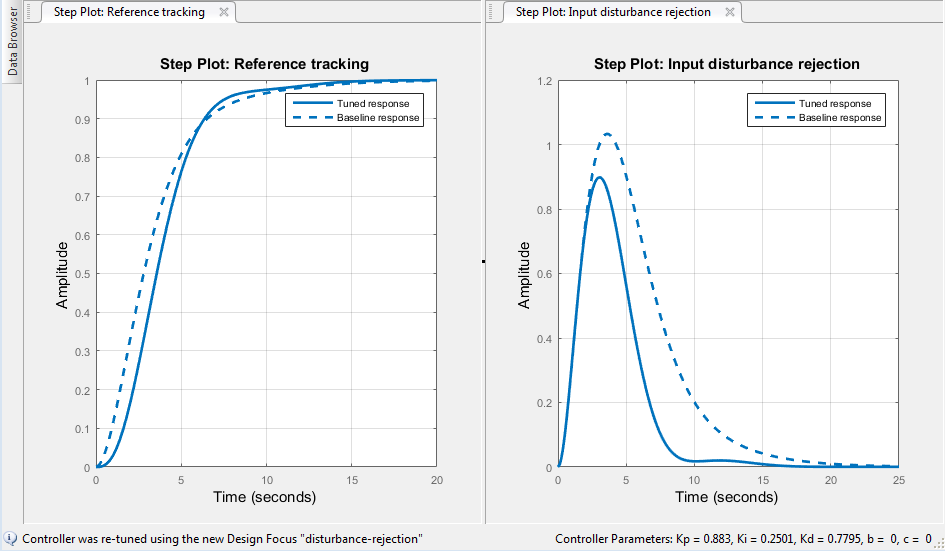
С особым вниманием сбалансированного плана по умолчанию PID Tuner выбирает значение b между 0 и 1. Для этого объекта, когда вы изменяете особое внимание проекта, чтобы способствовать подавлению помех, PID Tuner устанавливает b = 0 и c = 0. Таким образом PID Tuner автоматически генерирует контроллер I-PD, чтобы оптимизировать для подавления помех. (Явным образом определение контроллера I-PD, не устанавливая особое внимание проекта приводит к подобному контроллеру.)
Графики ответа показывают, что с изменением в особом внимании проекта, подавление помех далее улучшено по сравнению со сбалансированным контроллером 2-DOF. Это улучшение идет с некоторой жертвой производительности отслеживания уставки, которая немного медленнее. Однако ответ отслеживания уставки все еще не имеет никакого перерегулирования.
Таким образом использование управления 2-DOF может улучшить подавление помех, не жертвуя таким же количеством производительности отслеживания уставки как управление 1-DOF. Эти эффекты на производительность системы зависят строго от свойств вашего объекта и скорости вашего контроллера. Для некоторых объектов и некоторой пропускной способности управления, с помощью управления 2-DOF или изменяя особое внимание проекта имеет меньше или никакое влияние на настроенный результат.
