Используйте PID Tuner, чтобы настроить два ПИД-регулятора степени свободы (2DOF) и Дискретный ПИД-регулятор (2DOF) блоки, чтобы достигнуть и хорошего отслеживания заданного значения и хорошего подавления помех.
Два компенсатора ПИДа степени свободы, обычно известные как ISA-PID compensator,, эквивалентны feedforward компенсатору и компенсатору обратной связи, как показано в следующей фигуре.
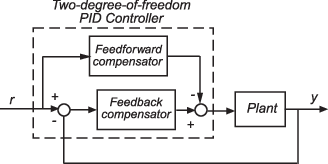
feedforward компенсатор является PD, и компенсатор обратной связи является ПИДом. В ПИД-регуляторе (2DOF) и Дискретном ПИД-регуляторе (2DOF) блоки, веса заданного значения b и c определяют силу пропорционального и производного действия в feedforward компенсаторе. Смотрите страницы с описанием блока PID Controller (2DOF) и Discrete PID Controller (2DOF) для получения дополнительной информации.
PID Tuner настраивает коэффициенты ПИД P, I, D и N. Для ПИД-регулятора (2DOF) блоки, тюнер также автоматически настраивает веса заданного значения b и c. Можно использовать те же методы, чтобы совершенствовать и анализировать проект, который вы используете для настройки ПИД-регуляторов степени свободы.
Настроить блок ПИД-регулятора 2-DOF в модели Simulink®:
Дважды кликните блок. В диалоговом окне параметров блоков нажмите Tune.
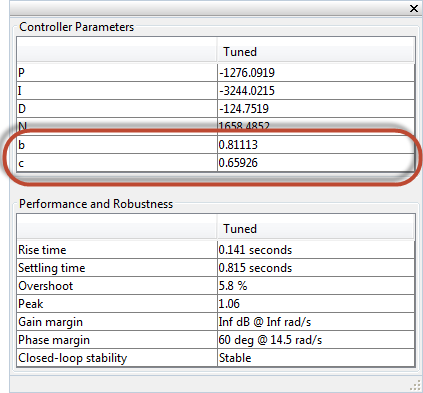
PID Tuner открывает, линеаризует модель в образцовых начальных условиях, и автоматически вычисляет первоначальный проект контроллера, который балансирует производительность и робастность. В этом проекте PID Tuner настраивает веса заданного значения b и c при необходимости, а также коэффициенты ПИД. Чтобы видеть настроенные значения всех коэффициентов, нажмите![]() Show Parameters.
Show Parameters.
Анализируйте и совершенствуйте первоначальный проект, описанный в Анализируют Проект в PID Tuner. Весь одинаковый графики ответа, корректировки проекта и опции доступны для настройки 2DOF ПИД-регуляторы как в одном случае степени свободы.
Проверьте, что проектирование контроллера, как описано в Проверяют Проект ПИДа в Вашей Модели Simulink.
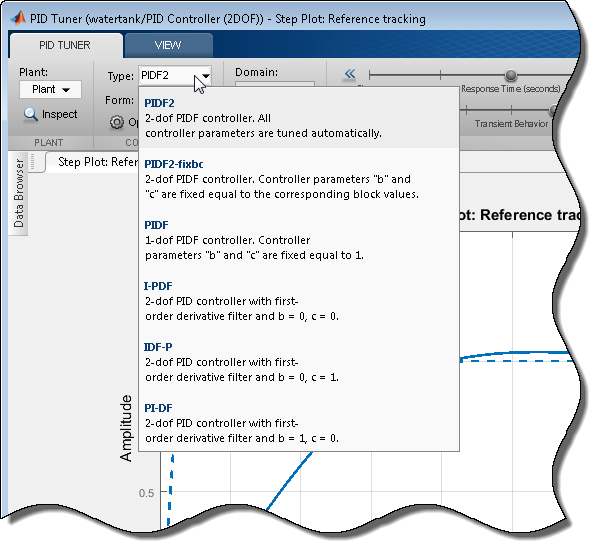
Когда вы настраиваете блок PID Controller (2DOF) в PID Tuner, дополнительных опциях для определения, что тип контроллера становится доступным в меню Type. Эти опции включают контроллеры с фиксированными весами заданного значения, такими как контроллеры, описанные в, Задают Контроллеры I-PD и ПИД.
Доступность некоторых опций типа зависит от установки Controller в диалоговом окне блока PID Controller (2DOF).
| Type | Описание | Установка Controller в блоке |
|---|---|---|
PIDF2 | ПИД-регулятор 2-DOF с фильтром на производном термине. PID Tuner настраивает все параметры контроллера, включая веса заданного значения. | PID |
PIDF2-fixbc | ПИД-регулятор 2-DOF с фильтром на производном термине. PID Tuner фиксирует веса заданного значения в значениях, заданных в блоке контроллера. | PID |
PIDF | Контроллер 2-DOF с действием, эквивалентным контроллеру 1-DOF PIDF, с фиксированным b = 1 и c = 1. | PID |
I-PDF | ПИД-регулятор 2-DOF с фильтром на производном термине, с фиксированным b = 0 и c = 0. | PID |
IDF-P | ПИД-регулятор 2-DOF с фильтром на производном термине, с фиксированным b = 0 и c = 1. | PID |
PI-DF | ПИД-регулятор 2-DOF с фильтром на производном термине, с фиксированным b = 1 и c = 0. | PID |
PI2 | Контроллер PI 2-DOF. PID Tuner настраивает все параметры контроллера, включая вес заданного значения на пропорциональном термине, b. | PI |
PI2-fixbc | Контроллер PI 2-DOF с фильтром на производном термине. PID Tuner фиксирует вес заданного значения b в значении, заданном в блоке контроллера. | PI |
PI | Контроллер 2-DOF с действием, эквивалентным контроллеру PI 1-DOF, с фиксированным b = 1. | PI |
PDF2 | Контроллер PD 2-DOF с фильтром на производном термине (никакой интегратор). PID Tuner настраивает все параметры контроллера, включая веса заданного значения. | PD |
PDF2-fixbc | Контроллер PD 2-DOF с фильтром на производном термине. PID Tuner фиксирует веса заданного значения в значениях, заданных в блоке контроллера. | PD |
PD | Контроллер 2-DOF с действием, эквивалентным контроллеру PD 1-DOF, с фиксированным b = 1 и c= 1. | PD |
