Одномерный цифровой фильтр объектов fi
y = filter(b,1,x)
[y,zf]
= filter(b,1,x,zi)
y = filter(b,1,x,zi,dim)
y = filter(b,1,x)x с помощью фильтра, описанного вектором фиксированной точки b. Функция возвращает отфильтрованные данные в объекте y вывода fi. Входные параметры b и x должны быть объектами fi. filter всегда действует по первому неодноэлементному измерению. Таким образом фильтр действует по первому измерению для вектор-столбцов и нетривиальных матриц, и вдоль второго измерения для векторов - строк.
[ предоставляет доступ к начальным и итоговым условиям задержек, y,zf]
= filter(b,1,x,zi) zi и zf. zi является вектором длины length(b)-1length(b)-1из x. zi должен быть объектом fi с совпадающим типом данных как y и zf. Если вы не задаете значение для zi, это принимает значение по умолчанию к массиву фиксированной точки со значением 0 и соответствующего numerictype и размера.
y = filter(b,1,x,zi,dim)[] для входного параметра zi.
|
Вектор фиксированной точки коэффициентов фильтра. |
|
Вектор фиксированной точки, содержащий данные для функции, чтобы отфильтровать. |
|
Вектор фиксированной точки, содержащий начальные условия задержек. Если начальные условия задержек являются нулем, можно задать нуль, или, если вы не знаете соответствующего размера и Если вы не задаете значение для |
|
Размерность, по которой можно выполнить операцию фильтрации. |
|
Выходной вектор, содержащий отфильтрованные данные фиксированной точки. |
|
Выходной вектор фиксированной точки, содержащий итоговые условия задержек. |
Следующий пример фильтрует высокочастотную синусоиду фиксированной точки от сигнала, который содержит и минимум - и высокочастотную синусоиду фиксированной точки.
w1 = .1*pi; w2 = .6*pi; n = 0:999; xd = sin(w1*n) + sin(w2*n); x = sfi(xd,12); b = ufi([.1:.1:1,1-.1:-.1:.1]/4,10); gd = (length(b)-1)/2; y = filter(b,1,x); % Plot results, accommodate for group-delay of filter plot(n(1:end-gd),x(1:end-gd)) hold on plot(n(1:end-gd),y(gd+1:end),'r--') axis([0 50 -2 2]) legend('Unfiltered signal','Filtered signal') xlabel('Sample index (n)') ylabel('Signal value')

Получившийся график показывает обоим неотфильтрованные и отфильтрованные сигналы.
Функция filter только поддерживает КИХ-фильтры. В общем представлении фильтра, b/a, знаменатель, a, КИХ-фильтра является скаляром 1, который является вторым входом этой функции.
numerictype b может отличаться, чем numerictype x.
Если вы хотите задать начальные условия, но не знаете, что numerictype использовать, сначала попытайтесь фильтровать свои данные без начальных условий. Можно сделать так путем определения [] для входа zi. После выполнения операции фильтрации у вас есть numerictype y и zf (если требуется). Поскольку numerictype zi должен совпадать с numerictype y и zf, вы теперь знаете, что numerictype использует для начальных условий.
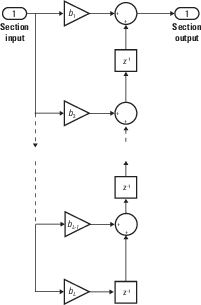
Функция filter использует Прямую Форму Транспонированная КИХ-реализация следующего разностного уравнения:
где L является длиной фильтра, и N является порядком фильтра.
Следующая схема показывает, что прямая форма транспонировала КИХ-структуру фильтра, используемую функцией filter: