Моделируйте адаптивную модель использования круиз-контроля прогнозирующий контроллер
Model Predictive Control Toolbox / Автоматизированное Управление
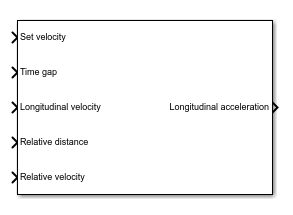
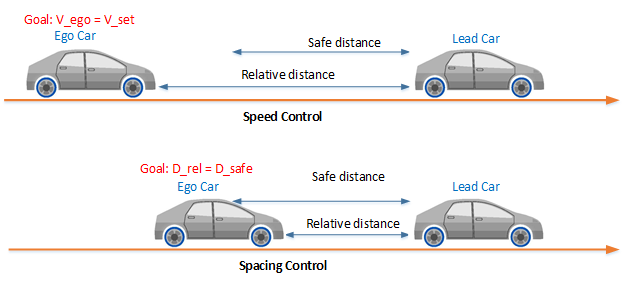
Блок Adaptive Cruise Control System моделирует систему адаптивного круиз-контроля (ACC), которая отслеживает скорость набора и поддерживает безопасное расстояние от ведущего автомобиля путем корректировки продольного ускорения автомобиля, оборудованного датчиком. Блок вычисляет действия оптимального управления при удовлетворении безопасного расстояния, скорости и ускоряющих ограничений с помощью образцового прогнозирующего управления (MPC).
Чтобы настроить ваш контроллер, например, использовать усовершенствованные функции MPC или изменить начальные условия контроллера, нажимают Create ACC subsystem.
Set velocity — Скоростное заданное значение автомобиля, оборудованного датчикомСкоростное заданное значение автомобиля, оборудованного датчиком в m/s. Когда нет никакого ведущего автомобиля, контроллер отслеживает эту скорость.
Time gap — Безопасный разрыв времениБезопасный разрыв времени в секундах между ведущим автомобилем и автомобилем, оборудованным датчиком. На этот раз разрыв используется, чтобы вычислить минимальное безопасное следующее ограничение расстояний. Для получения дополнительной информации смотрите Безопасное Следующее Расстояние.
Longitudinal velocity — Скорость автомобиля, оборудованного датчикомСкорость автомобиля, оборудованного датчиком в m/s.
Relative distance — Расстояние между ведущим автомобилем и автомобилем, оборудованным датчикомРасстояние в метрах между ведущим автомобилем и автомобилем, оборудованным датчиком. Чтобы вычислить этот сигнал, вычтите положение автомобиля, оборудованного датчиком из ведущего положения автомобиля.
Relative velocity — Различие скорости между ведущим автомобилем и автомобилем, оборудованным датчикомРазличие скорости в метрах в секунду между ведущим автомобилем и автомобилем, оборудованным датчиком. Чтобы вычислить этот сигнал, вычтите скорость автомобиля, оборудованного датчиком из ведущей скорости автомобиля.
Minimum longitudinal acceleration — Минимальное ускорение автомобиля, оборудованного датчикомМинимальный автомобиль, оборудованный датчиком продольное ускоряющее ограничение в m/s2. Используйте этот входной порт, когда минимальное ускорение будет отличаться во время выполнения.
Чтобы включить этот порт, выберите Use external source для параметра Minimum longitudinal acceleration.
Maximum longitudinal acceleration — Максимальное ускорение автомобиля, оборудованного датчикомМаксимальный автомобиль, оборудованный датчиком продольное ускоряющее ограничение в m/s2. Используйте этот входной порт, когда максимальное ускорение будет отличаться во время выполнения.
Чтобы включить этот порт, выберите Use external source для параметра Maximum longitudinal acceleration.
Enable optimization — Оптимизация контроллера включает сигналОптимизация контроллера включает сигнал. Когда этот сигнал:
Ненулевой, контроллер выполняет вычисления оптимизации и генерирует управляющий сигнал Longitudinal acceleration.
Нуль, контроллер не выполняет вычисления оптимизации. В этом случае выходной сигнал Longitudinal acceleration остается в значении, которое он имел, когда оптимизация была отключена. Контроллер продолжает обновлять его оценки внутреннего состояния.
Чтобы включить этот порт, выберите параметр Use external signal to enable or disable optimization.
External control signal — Продольное ускорение применилось к автомобилю, оборудованному датчикомФактическое продольное ускорение в m/s2 применилось к автомобилю, оборудованному датчиком. Диспетчер использует этот сигнал оценить состояния модели автомобиля, оборудованного датчиком. Используйте этот входной порт, когда управляющий сигнал применился к автомобилю, оборудованному датчиком, не совпадает с сигналом оптимального управления, вычисленным образцовым прогнозирующим контроллером. Это несоответствие может произойти когда, например:
Адаптивная Система Круиз-контроля не является активным контроллером. Поддержание точной оценки состояния, когда контроллер не активен, предотвращает удары в управляющем сигнале, когда контроллер становится активным.
Ускоряющие сбои привода и не предоставляют правильный управляющий сигнал автомобилю, оборудованному датчиком.
Чтобы включить этот порт, выберите параметр Use external control signal for bumpless transfer between ACC and other controllers.
Longitudinal acceleration — Ускоряющий управляющий сигналУскоряющий управляющий сигнал в m/s2 сгенерирован контроллером.
Linear model from longitudinal acceleration to longitudinal velocity — Модель автомобиля, оборудованного датчикомtf(1,[0.5,1,0]) (значение по умолчанию) | модель LTI | модель Identification Toolbox™ линейной системыЛинейная модель от автомобиля, оборудованного датчиком продольное ускорение к его продольной скорости, заданной как модель LTI или модель Identification Toolbox линейной системы. Контроллер создает его внутреннюю прогнозирующую модель путем увеличения динамической модели автомобиля, оборудованного датчиком.
Initial condition for longitudinal velocity — Начальная скорость модели автомобиля, оборудованного датчиком20 (значение по умолчанию) | неотрицательный скалярНачальная скорость в m/s модели автомобиля, оборудованного датчиком, которая может отличаться от фактической скорости начальной буквы автомобиля, оборудованного датчиком.
Это значение используется, чтобы сконфигурировать начальные условия образцового прогнозирующего контроллера. Для получения дополнительной информации смотрите Начальные условия.
Default spacing — Интервал минимума, чтобы привести автомобиль10 (значение по умолчанию) | неотрицательный скалярМинимальный интервал в метрах между ведущим автомобилем и автомобилем, оборудованным датчиком. Это значение соответствует целевому относительному расстоянию между эго и ведущими автомобилями, когда скорость автомобиля, оборудованного датчиком является нулем.
Это значение используется, чтобы вычислить:
Минимальное безопасное следующее расстояние. Для получения дополнительной информации смотрите Безопасное Следующее Расстояние.
Начальные условия контроллера. Для получения дополнительной информации смотрите Начальные условия.
Maximum velocity — Максимальная продольная скорость50 (значение по умолчанию) | положительная скалярная величинаМаксимальный автомобиль, оборудованный датчиком продольная скорость в m/s.
Minimum longitudinal acceleration — Минимальное ускорение автомобиля, оборудованного датчиком-3 (значение по умолчанию) | отрицательный скалярМинимальный автомобиль, оборудованный датчиком продольное ускоряющее ограничение в m/s2.
Если минимальное ускорение отличается в зависимости от времени, добавьте входной порт Minimum longitudinal acceleration в блок путем выбора Use external source.
Maximum longitudinal acceleration — Максимальное ускорение автомобиля, оборудованного датчиком2 (значение по умолчанию) | неотрицательный скалярМаксимальный автомобиль, оборудованный датчиком продольное ускоряющее ограничение в m/s2.
Если максимальное ускорение отличается в зависимости от времени, добавьте входной порт Maximum longitudinal acceleration в блок путем выбора Use external source.
'SampleTime' Шаг расчета контроллера0.1 (значение по умолчанию) | положительная скалярная величинаШаг расчета контроллера в секундах.
Prediction horizon — Горизонт прогноза контроллера10 (значение по умолчанию) | положительное целое числоШаги горизонта прогноза контроллера. Время прогноза контроллера является продуктом шага расчета и горизонта прогноза.
Controller behavior — Производительность контроллера с обратной связью0.5 (значение по умолчанию) | скаляр между 0 и 1Производительность контроллера с обратной связью. Значение параметров по умолчанию обеспечивает сбалансированное проектирование контроллера. Определение a:
Меньшее значение производит более устойчивый контроллер с более сглаженными действиями управления.
Большее значение производит более агрессивный контроллер с более быстрым временем отклика.
Когда вы изменяете этот параметр, изменение сразу применяется к контроллеру.
Use suboptimal solution — Примените субоптимальное решение после конкретного количества итерацийoff (значение по умолчанию) | onСконфигурируйте контроллер, чтобы применить субоптимальное решение после заданного максимального количества итераций, которое гарантирует время выполнения худшего случая для вашего контроллера.
Для получения дополнительной информации смотрите Субоптимальное Решение QP.
После выбора этого параметра задайте параметр Maximum iteration number.
Maximum iteration number — Максимальные итерации оптимизации10 (значение по умолчанию) | положительное целое числоМаксимальное количество итераций оптимизации контроллера.
Чтобы включить этот параметр, выберите параметр Use suboptimal solution.
Use external signal to enable or disable optimization — Add для включения оптимизацииoff (значение по умолчанию) | onЧтобы добавить входной порт Enable optimization в блок, выберите этот параметр.
Use external signal for bumpless transfer between ACC and other controllers — Добавьте входной порт сигнала внешнего управленияoff (значение по умолчанию) | onВыберите этот параметр, чтобы добавить входной порт External control signal в блок.
Create ACC subsystem — Создайте пользовательский контроллерСгенерируйте пользовательскую подсистему ACC, которую можно изменить для приложения. Данные конфигурации для пользовательского контроллера экспортируются в рабочую область MATLAB® как структура.
Можно изменить пользовательскую подсистему контроллера к:
Измените настройки MPC по умолчанию или используйте, усовершенствовал функции MPC.
Измените начальные условия контроллера по умолчанию.
Используйте различные параметры настройки приложения, такие как пользовательское безопасное следующее определение расстояния.
По умолчанию образцовый прогнозирующий контроллер вычисляет безопасное следующее ограничение расстояний; то есть, минимальное относительное расстояние между выводом и автомобилем, оборудованным датчиком, как:
Здесь:
DS является параметром Default spacing.
GT является входным сигналом Time gap.
VE является входным сигналом Longitudinal velocity.
Чтобы задать различное безопасное следующее ограничение расстояний, создайте пользовательскую систему круиз-контроля, на вкладке Block, нажатие по Create ACC subsystem.
По умолчанию образцовый прогнозирующий контроллер принимает следующие начальные условия:
Продольная скорость и автомобиля, оборудованного датчиком и ведущего автомобиля равняется значению параметров Initial condition for longitudinal velocity.
Автомобиль, оборудованный датчиком продольное ускорение является нулем.
Относительное расстояние между ведущим автомобилем и автомобилем, оборудованным датчиком:
Здесь:
DS является параметром Default spacing.
GT является разрывом времени и принят, чтобы быть 1.4.
VE является параметром Initial longitudinal velocity.
Если начальные условия в вашей модели не совпадают с этими условиями, Longitudinal acceleration, вывод может показать начальный удар в начале симуляции.
Чтобы изменить начальные условия контроллера, чтобы совпадать с вашей симуляцией, создайте пользовательскую систему круиз-контроля, на вкладке Block, нажатие по Create ACC subsystem.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.


