Эта тема показывает, как сконфигурировать контроллер MPC для неквадратного объекта с неравными количествами переменных, которыми управляют, и выходных параметров. Программное обеспечение Model Predictive Control Toolbox™ поддерживает объекты с избытком переменных, которыми управляют, или объект с избытком выходных параметров.
Когда существуют избыточные выходные параметры, вы не можете содержать каждого в заданном значении. В этом случае у вас есть две опции:
Укажите, что определенные выходные параметры не должны быть сохранены в заданных значениях путем обнуления их настраивающих весов.
Контроллер не осуществляет заданные значения на выходных параметрах с нулевым весом, и выходные параметры свободны отличаться. Если объект имеет Ne больше выходных параметров, чем переменные, которыми управляют, установки Ne, выходные веса, чтобы обнулить позволяют контроллеру содержать остающиеся выходные параметры в своих заданных значениях. Если какие-либо переменные, которыми управляют, ограничиваются, один или несколько выходных ответов могут все еще показать установившуюся ошибку, в зависимости от значений сигналов воздействия и ссылки.
Выходные параметры с нулевыми настраивающими весами могут все еще быть полезными. Если измерено, диспетчер может использовать выходные параметры, чтобы помочь оценить состояние объекта. Выходные параметры могут также использоваться в качестве показателей эффективности или сохранены в операционной области, заданной выходными ограничениями.
Осуществите заданные значения на всех выходных параметрах путем определения ненулевых настраивающих весов для всех них.
Диспетчер пытается содержать все выходные параметры в их соответствующих заданных значениях. Однако из-за ограниченного количества переменных, которыми управляют, все выходные ответы показывают определенную степень установившейся ошибки.
Можно изменить ошибочные значения путем корректировки относительных значений выходных весов. Увеличение выходного веса уменьшает установившуюся ошибку в том выводе за счет увеличенной ошибки в других выходных параметрах.
Можно сконфигурировать выходные настраивающие веса в командной строке путем установки свойства Weights.OutputVariables контроллера.
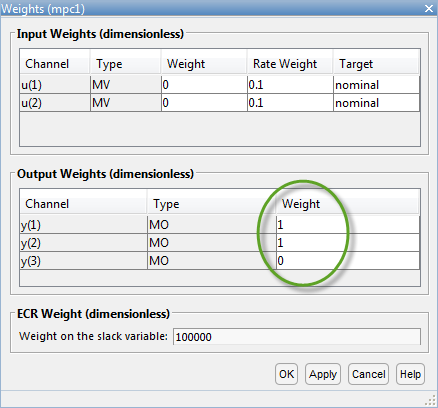
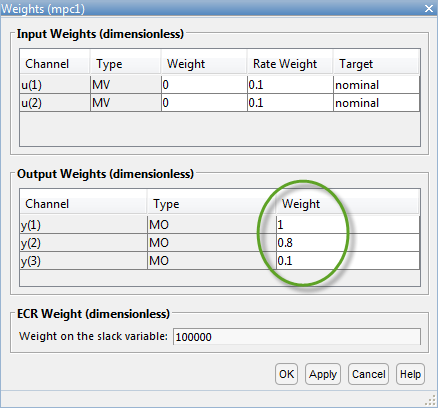
Чтобы сконфигурировать выходные настраивающие веса в MPC Designer, на вкладке Tuning, в разделе Design, нажимают Weights, чтобы открыть диалоговое окно Weights.
В разделе Output Weights задайте Weight для каждой выходной переменной. Например, если ваш объект имеет две переменные, которыми управляют, и три выходных параметров, вы можете:
Обнулите один из выходных весов.
Установите все веса на ненулевые значения. Выходные параметры с более высокими весами показывают меньше установившейся ошибки.
Когда существуют чрезмерные переменные, которыми управляют, настройки контроллера MPC по умолчанию позволяют, чтобы безошибочное выходное заданное значение отследило. Однако значения переменных, которыми управляют, могут дрейфовать. Можно предотвратить этот дрейф путем установки переменных заданных значений, которыми управляют. Если существуют переменные избытка Ne, которыми управляют, и вы содержите Ne их в целевых значениях по экономическим или операционным причинам, остающиеся переменные, которыми управляют, достигают значений, требуемых устранить вывод установившаяся ошибка.
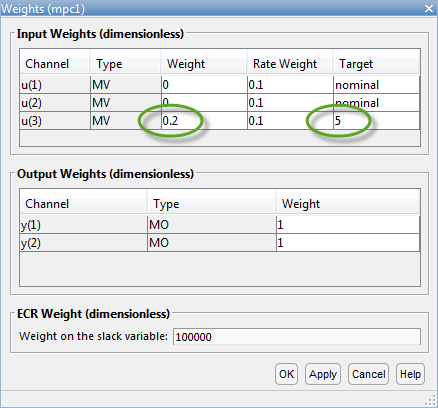
Чтобы сконфигурировать переменное заданное значение, которым управляют, в командной строке, используйте контроллер ManipulatedVariables.Target свойство. Затем задайте вход, настраивающий вес с помощью свойства Weights.ManipulatedVariables контроллера.
Чтобы задать переменное заданное значение, которым управляют, в MPC Designer, на вкладке Tuning, в разделе Design, нажимают Weights.
В диалоговом окне Weights, в разделе Input Weights, задают ненулевое значение Weight для переменной, которой управляют.
Задайте значение Target для переменной, которой управляют.
По умолчанию переменной Target, которой управляют, является nominal, что означает, что это отслеживает номинальную стоимость, заданную в свойствах контроллера.
Поскольку номинальная стоимость применяется ко всем контроллерам на сеансе MPC Designer, изменение Nominal Value обновляет все контроллеры в приложении. Значение Target, однако, характерно для каждого отдельного контроллера.
Значение переменного веса, которым управляют, указывает, сколько вход может отклонить от его заданного значения. Однако между переменным целевым отслеживанием уставки отслеживания и вывода, которым управляют существует компромисс. Если вы хотите лучше вывести производительность отслеживания заданного значения, используйте относительно маленький входной вес. Если вы хотите, чтобы переменная, которой управляют, осталась близко к ее целевому значению, увеличила свой входной вес относительно выходного веса.
Можно также избежать дрейфа путем ограничения одной или нескольких переменных, которыми управляют, в узкую операционную область с помощью трудных ограничений. Чтобы задать ограничения в MPC Designer, на вкладке Tuning, в разделе Design, нажимают Constraints, чтобы открыть диалоговое окно Constraints.
В разделе Input Constraints задайте Max и ограничительные значения Min.
