Как объяснено в Задаче оптимизации, wy, wu и веса w∆u могут измениться от одного шага в горизонте прогноза к следующему. Такой time-varying weight является массивом, содержащим строки p, где p является горизонтом прогноза, и или ny или столбцы nu (количество OVs или MVS).
Используя изменяющиеся во времени веса обеспечивает дополнительные настраивающие возможности. Однако это усложняет настройку. Методические рекомендации должны использовать постоянные веса, если ваше приложение не включает необычные характеристики. Например, приложение, требующее терминальных весов, должно использовать изменяющиеся во времени веса. Смотрите Терминальные Веса и Ограничения.
Можно задать изменяющиеся во времени веса в MPC Designer. В диалоговом окне Weights задайте изменяющийся во времени вес как вектор. Каждый элемент вектора соответствует одному шагу в горизонте прогноза. Если длина вектора является меньше, чем p, последнее значение веса запрашивает остаток от горизонта прогноза.
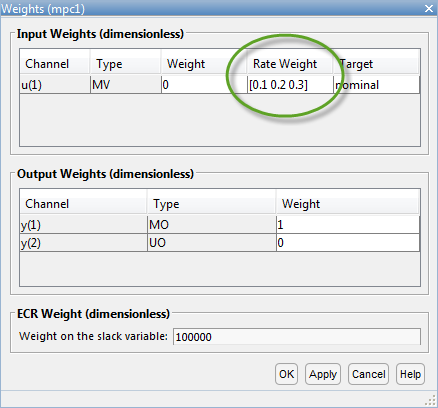
Для любого данного входного канала можно задать различные длины вектора для Rate Weight и Weight. Однако, если вы задаете изменяющийся во времени Weight для какого-либо входного канала, необходимо задать изменяющийся во времени Weight для всех входных параметров с помощью тех же векторов веса длины. Точно так же все значения входа Rate Weight должны использовать ту же длину вектора.
Кроме того, если вы задаете изменяющийся во времени Weight для какого-либо выходного канала, необходимо задать изменяющийся во времени Weight для всего вывода с помощью тех же векторов веса длины.
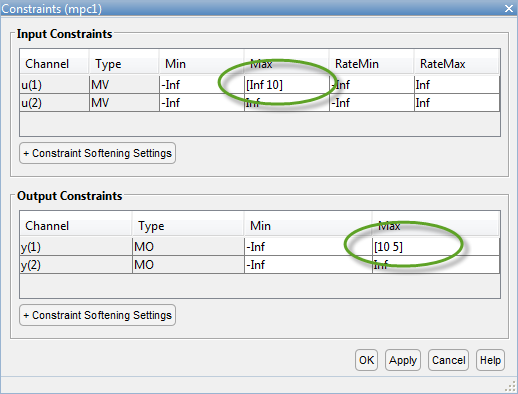
При ограничении мВ, OV или шага мВ, можно использовать различное связанное значение на каждом шаге горизонта прогноза. Для этого задайте связанное как вектор до значений p, где p является длиной горизонта прогноза (количество интервалов управления). Если вы задаете n <значения p, n th значение запрашивает остающийся p – шаги n .
Можно удалить ограничения на выбранных шагах путем определения Inf (или -Inf).
Если задержки объекта препятствуют тому, чтобы MVS влиял на OV во время первых шагов d горизонта прогноза, и необходимо включать границы на этом OV, оставить неограниченное OV для первых шагов d.
Можно задать изменяющиеся во времени ограничения в MPC Designer. В диалоговом окне Constraints задайте вектор для каждого изменяющегося во времени ограничения.