Потеря поляризации
rho = polloss(fv_tr,fv_rcv)rho = polloss(fv_tr,fv_rcv,pos_rcv)rho = polloss(fv_tr,fv_rcv,pos_rcv,axes_rcv)rho = polloss(fv_tr,fv_rcv,pos_rcv,axes_rcv,pos_tr)rho = polloss(fv_tr,fv_rcv,pos_rcv,axes_rcv,pos_tr,axes_tr)rho = polloss(fv_tr,fv_rcv)fv_tr, и поляризацией антенны получения, fv_rcv. Полевой вектор находится в плоскости, ортогональной к направлению распространения с передатчика на получатель. Переданное поле представлено как 2 1 вектор-столбец [Eh;Ev]. В этом векторе Eh и Ev являются горизонталью поля и вертикальными линейными компонентами поляризации относительно системы локальной координаты передатчика. Поляризация антенны получения задана 2 1 вектор-столбец, fv_rcv. Можно также задать эту поляризацию в форме [Eh;Ev] относительно системы локальной координаты антенны получения. В этом синтаксисе обе оси локальной координаты выравниваются с глобальной системой координат.
rho = polloss(fv_tr,fv_rcv,pos_rcv)[x;y;z], относительно глобальной системы координат (модули положения исчисляются в метрах). Этот синтаксис может использовать любой из входных параметров в предыдущем синтаксисе.
rho = polloss(fv_tr,fv_rcv,pos_rcv,axes_rcv)axes_rcv. Эти оси задают систему локальной координаты получателя как 3х3 матрицу. Первый столбец дает x - ось локальной системы относительно глобальной системы координат. Вторые и третьи столбцы дают y и оси z, соответственно. Этот синтаксис может использовать любой из входных параметров в предыдущих синтаксисах.
rho = polloss(fv_tr,fv_rcv,pos_rcv,axes_rcv,pos_tr)[x;y;z], относительно глобальной системы координат (модули положения исчисляются в метрах). Этот синтаксис может использовать любой из входных параметров в предыдущих синтаксисах.
rho = polloss(fv_tr,fv_rcv,pos_rcv,axes_rcv,pos_tr,axes_tr)axes_tr. Эти оси задают систему локальной координаты передатчика как 3х3 матрицу. Первый столбец дает x - ось локальной системы относительно глобальной системы координат. Вторые и третьи столбцы дают y и оси z, соответственно. Этот синтаксис может использовать любой из входных параметров в предыдущих синтаксисах.
Начните с поляризованного переданного поля на 45 ° и получателя, который горизонтально поляризован. По умолчанию передатчик и получатель локальные оси совпадают с глобальной системой координат. Вычислите потерю поляризации в дБ.
fv_tr = [1;1]; fv_rcv = [1;0]; rho = polloss(fv_tr,fv_rcv)
rho = 3.0103
Потеря составляет 3 дБ как ожидалось, потому что только половина степени поля соответствует к получить поляризации антенны.
Начните с идентичной поляризации передатчика и получателя. Поместите получатель в положении 100 метров вдоль оси Y. Передатчик в начале координат (его положение по умолчанию), и обе оси локальной координаты совпадают с глобальной системой координат (по умолчанию). Во-первых, вычислите потерю поляризации. Затем переместите получатель 100 метров вдоль the_x_-оси и вычислите потерю поляризации снова.
fv_tr = [1;0]; fv_rcv = [1;0]; pos_rcv = [0;100;0]; rho(1) = polloss(fv_tr,fv_rcv,pos_rcv); pos_rcv = [100;100;0]; rho(2) = polloss(fv_tr,fv_rcv,pos_rcv)
rho = 1×2
0 0
Никакая потеря поляризации не происходит ни в одном положении. Сферические базисные векторы каждой антенны параллельны другой антенне, и векторы поляризации являются тем же самым.
Запустите с идентичной поляризации передатчика и получателя. Поместите получатель в положение 100 метров вдоль оси Y. Передатчик в начале координат (значение по умолчанию), и обе оси локальной координаты совпадают с глобальной системой координат (значение по умолчанию). Вычислите потерю, и затем вращайте получатель 30 ° вокруг оси Y. Это вращение изменяет азимут и повышение передатчика относительно получателя и, поэтому, направление поляризации.
fv_tr = [1;0]; fv_rcv = [1;0]; pos_rcv = [0;100;0]; ax_rcv = azelaxes(0,0); rho(1) = polloss(fv_tr,fv_rcv,pos_rcv,ax_rcv); ax_rcv = roty(30)*ax_rcv; rho(2) = polloss(fv_tr,fv_rcv,pos_rcv,ax_rcv)
rho = 1×2
0 1.2494
Вектор поляризации получателя остается неизменным. Однако вращение системы локальной координаты изменяет направление поля поляризации антенны получения относительно глобальных координат. Это изменение приводит к потере на 1,2 дБ.
Запустите с идентичной поляризации передатчика и получателя. Поместите получатель в положение 100 метров вдоль the_y_-оси. Передатчик в начале координат (значение по умолчанию), и обе оси локальной координаты совпадают с глобальной системой координат (значение по умолчанию). Во-первых, вычислите потерю поляризации. Затем переместите передатчик 100 метров вдоль оси X и 100 метров вдоль оси Y, и вычислите потерю поляризации снова.
fv_tr = [1;0]; fv_rcv = [1;0]; pos_rcv = [0;100;0]; ax_rcv = azelaxes(0,0); pos_tr = [0;0;0]; rho(1) = polloss(fv_tr,fv_rcv,pos_rcv,ax_rcv,pos_tr); pos_tr = [100;100;0]; rho(2) = polloss(fv_tr,fv_rcv,pos_rcv,ax_rcv,pos_tr)
rho = 1×2
0 0
Нет никакой потери поляризации ни в одном положении, потому что сферические базисные векторы каждой антенны параллельны своим дубликатам, и векторы поляризации являются тем же самым.
При определении идентичной поляризации передатчика и получателя постройте потерю, когда локальные оси антенны получения вращаются вокруг ось.
fv_tr = [1;0]; fv_rcv = [1;0];
Положение антенны передачи в начале координат, и его локальные оси выравниваются с глобальной системой координат. Положение антенны получения составляет 100 метров вдоль глобальной переменной ось. Однако его локальная переменная - ось указывает на антенну передачи.
pos_tr = [0;0;0]; axes_tr = azelaxes(0,0); pos_rcv = [100;0;0]; axes_rcv0 = rotz(180)*azelaxes(0,0);
Вращайте антенну получения вокруг ее локальной переменной - ось с шагом с одной степенью. Вычислите потерю для каждого угла.
angles = [0:1:359]; n = size(angles,2); rho = zeros(1,n); % Initialize space for k = 1:n axes_rcv = rotx(angles(k))*axes_rcv0; rho(k) = polloss(fv_tr,fv_rcv,pos_tr,axes_tr,... pos_rcv,axes_rcv); end
Постройте потерю поляризации.
hp = plot(angles,rho); hax = hp.Parent; hax.XLim = [0,360]; xticks = (0:(n-1))*45; hax.XTick = xticks; grid; title('Polarization loss versus receiving antenna rotation') xlabel('Rotation angle (degrees)'); ylabel('Loss (dB)');

График угловой потери показывает, аннулирует (дБ Inf) в 90 градусах и 270 градусах, где поляризация является ортогональной.
Потеря происходит, когда получатель не является соответствующим к поляризации инцидентного электромагнитного поля.
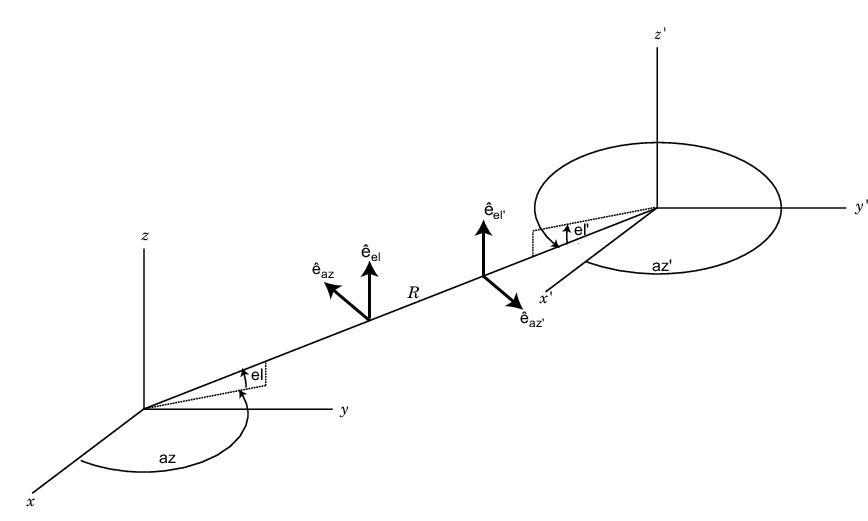
В случае поляризации поля, испускаемого антенной передачи, во-первых, смотрят на далекую зону антенны передачи, как показано в следующей фигуре. В этом location―which местоположение получения antenna―the, электромагнитное поле является ортогональным к направлению с передатчика на получатель.
Можно представлять переданное электромагнитное поле, fv_tr, компонентами вектора относительно сферического основания системы локальной координаты передатчика. Ориентация этого основания зависит от своего направления от источника. Направление задано азимутом и повышением антенны получения относительно системы локальной координаты передатчика. Затем поляризация передатчика, с точки зрения сферических базисных векторов системы локальной координаты передатчика,
Таким же образом вектор поляризации получателя, fv_rcv, задан относительно сферического основания в системе локальной координаты получателя. Теперь, азимут и повышение задают положение передатчика относительно системы локальной координаты получателя. Можно записать поляризацию антенн получения с точки зрения сферических базисных векторов системы локальной координаты получателя:
Эти данные показывают конструкцию различных систем локальной координаты передатчика и получателя. Это также показывает сферические базисные векторы, с которыми можно записать полевые компоненты.
Потеря поляризации является проекцией (или скалярное произведение) нормированного переданного полевого вектора на нормированный вектор поляризации получателя. Заметьте, что потеря происходит из-за несоответствия в направлении этих двух векторов не в их значениях. Поскольку векторы заданы в различных системах координат, они должны быть преобразованы в глобальную систему координат в порядке сформировать проекцию. Потеря поляризации задана:
[1] Мотт, H. Антенны для радара и коммуникаций. John Wiley & Sons, 1992.
