Гидравлический ротационный привод двойного действия
Гидравлические цилиндры

Блок Double-Acting Rotary Actuator моделирует гидравлический ротационный привод двойного действия, который непосредственно преобразовывает гидравлическую энергию в механическую вращательную энергию, не используя посреднические передачи, такие как реечная передача, двигая сплайн, цепочку, и так далее. Гидравлическая жидкость, накачанная под давлением в одну из двух камер привода, обеспечивает вал, чтобы вращать и сгенерировать крутящий момент. Приводы двойного действия генерируют крутящий момент и движение в обоих направлениях.
Модель привода создана блоков библиотеки Simscape™ Foundation. Принципиальную схему модели показывают ниже.
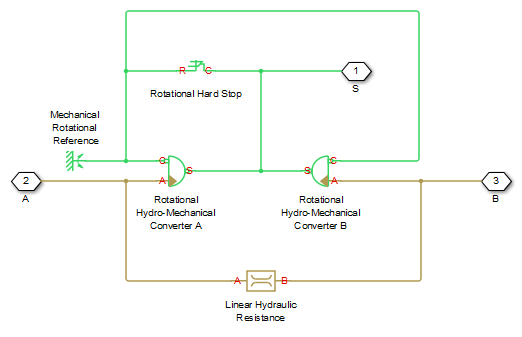
Блоки в схеме выполняют следующие функции:
| Вращательный гидромеханический конвертер A | Преобразовывает энергию гидравлики в механическую вращательную энергию, когда жидкость накачана в A камеры привода при составлении жидкой сжимаемости. |
| Вращательный гидромеханический конвертер B | Преобразовывает энергию гидравлики в механическую вращательную энергию, когда жидкость накачана в B камеры привода при составлении жидкой сжимаемости. |
| Вращательная жесткая остановка | Накладывает ограничения на вращение вала. |
| Линейное гидравлическое сопротивление | Счета на утечки. |
Связи A и B являются гидравлическими портами сохранения. Порт A соединяется, чтобы поместить в камеру A, и порт B соединяется, чтобы поместить в камеру B. Связь S является механическим вращательным портом сохранения, сопоставленным с валом привода.
Направленность блока является корректируемой и может управляться с параметром Actuator orientation.
Никакая загрузка, такая как инерция, трение, пружина, и так далее, не учтена. При необходимости можно легко добавить их путем соединения соответствующего стандартного блока с портом S.
Эффективное смещение привода. Значением по умолчанию является 4.5e-5 m^3/rad.
Перемещение максимума вала между остановками. Значение по умолчанию является радом 5.1.
Положение вала в начале симуляции. Можно установить положение вала на любой угол в его штрихе. Значением по умолчанию является 0, который соответствует положению вала в самом начале штриха.
Жидкий объем в камере, который остается в камере, когда вал расположен в самом начале штриха. Значением по умолчанию является 1e-4 m^3.
Жидкий объем в камере B, который остается в камере, когда вал расположен в конце штриха. Значением по умолчанию является 1e-4 m^3.
Пропустите коэффициент для блока Linear Hydraulic Resistance. Значением по умолчанию является 1e-14 (m^3/s)/Pa.
Газово-специфичное отношение тепла для блока Hydraulic Piston Chamber. Значением по умолчанию является 1.4.
Задает эластичное свойство сталкивающихся тел для блока Rotational Hard Stop. Чем больше значение параметра, тем меньше тела проникают друг в друга, более твердое, которым становится влияние. Меньшее значение параметра вступает в контакт более мягкое, но обычно улучшает сходимость и вычислительную эффективность. Значением по умолчанию является 1e6 N*m/rad.
Задает рассеивающееся свойство сталкивающихся тел для блока Rotational Hard Stop. При нулевом затухании влияние близко к абсолютно эластичному. Чем больше значение параметра, тем больше энергии рассеивается во время взаимодействия. Следует иметь в виду, что затухание влияет на движение ползунка, пока ползунок находится в контакте с остановкой, включая период, когда ползунок задержан от контакта. По вычислительным причинам эффективности и сходимости MathWorks рекомендует, чтобы вы присвоили ненулевое значение этому параметру. Значение по умолчанию является 150 N*m / (rad/s).
Моделирование подхода для жестких остановок. Опции включают:
Stiffness and damping applied smoothly through transition region (значение по умолчанию) — Шкала значение контакта обеспечивает от нуля до его полной стоимости за заданную продолжительность перехода. Масштабирование является полиномом по своей природе. Функция масштабирования полинома численно сглаженна, и она не производит нулевых пересечений никакого вида.
Full stiffness and damping applied at bounds, undamped rebound — Применяет полную стоимость расчетной силы контакта, когда местоположение жесткой остановки нарушено. Сила контакта является соединением пружины и ослабляющих сил во время проникновения и пружинной силы — без компонента затухания — во время восстановления. Никакое сглаживание не применяется.
Full stiffness and damping applied at bounds, damped rebound — Примените полную стоимость расчетной силы контакта, когда местоположение жесткой остановки будет нарушено. Сила контакта является соединением пружины и ослабляющих сил и во время проникновения и во время восстановления. Никакое сглаживание не применяется. Это - модель жесткой остановки, используемая в предыдущих релизах.
Расстояние, ниже которого масштабирование применяется к силе жесткой остановки. Сила контакта является нулем, когда расстояние до жесткой остановки равно значению, заданному здесь. Это в его полной стоимости, когда расстояние до жесткой остановки является нулем. Значение по умолчанию 1 mm..
Задает ориентацию привода относительно глобально присвоенного положительного направления. Привод может быть установлен двумя различными способами, в зависимости от того, генерирует ли он крутящий момент в положительном или в отрицательном направлении, когда давление оказывается на свое входное отверстие. Если давление, оказанное на порт A, генерирует крутящий момент в отрицательном направлении, установите параметр на Acts in negative direction. Значением по умолчанию является Acts in positive direction.
Параметр, определенный типом рабочей жидкости:
Fluid bulk modulus
Используйте блок Hydraulic Fluid или блок Custom Hydraulic Fluid, чтобы задать жидкие свойства.
Блок имеет следующие порты:
AГидравлический порт сохранения, сопоставленный с приводом, помещает в камеру A.
BГидравлический порт сохранения, сопоставленный с приводом, помещает в камеру B.
SМеханический вращательный порт сохранения сопоставлен с валом привода.
Линейное гидравлическое сопротивление | Вращательная жесткая остановка | Вращательный гидромеханический конвертер
