Фрикционный тормоз с два вертелся обувь, диаметрально расположенная о вращающемся барабане
Brakes & Detents / Вращательный

Блок представляет фрикционный тормоз с два, вертелся твердая обувь, которая нажимает против вращающегося барабана, чтобы произвести торможение. Твердая обувь находится внутри или снаружи вращающегося барабана в диаметрально противоположной настройке. Положительная сила приведения в действие заставляет твердую обувь нажимать против вращающегося барабана. Вязкий и трение контакта между барабаном и твердыми поверхностями обуви заставляют вращающийся барабан замедляться. Тормоза двойной обуви предоставляют высокому тормозному моменту маленькие отклонения привода в приложениях, которые включают моторные транспортные средства и некоторое тяжелое машиностроение. Модель использует простую параметризацию с с готовностью доступной геометрией тормоза и параметрами трения.
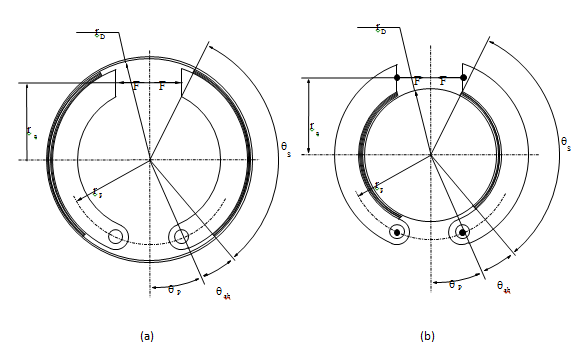
В этом схематичном, a) представляет внутренний тормоз двойной обуви и b) представляет внешний тормоз двойной обуви. В обеих настройках положительная сила приведения в действие F сводит обувь и поверхности трения барабана. Результатом является крутящий момент трения, который вызывает замедление вращающегося барабана. Нуль и отрицательные силы не сводят обувь и поверхности трения барабана и производят нулевой тормозной момент.
Модель использует приближение длинной обуви. Свяжитесь с углами, меньшими, чем 45 ° приводят к менее точным результатам. Уравнения для крутящего момента трения, который разрабатывают продвижение и запаздывающая обувь:
где для ,
и для ,
Параметры в уравнениях крутящего момента трения:
| Параметр | Описание |
|---|---|
| TLS | Крутящий момент тормоза ведущая обувь разрабатывает |
| TTS | Крутящий момент тормоза запаздывающая обувь разрабатывает |
| μ | Эффективный коэффициент трения контакта |
| pa | Максимальное линейное давление в ведущем контакте барабана обуви |
| pb | Максимальное линейное давление в запаздывающем контакте барабана обуви |
| rD | Радиус барабана |
| θsb | Угол начала обуви |
| θs | Угол промежутка обуви |
| θa | Угол от стержня прикрепляет к максимальной точке давления |
| c | Длина руки цилиндра обеспечивает относительно контакта стержня |
| rp | Прикрепите радиус местоположения |
| θp | Угол местоположения контакта стержня |
| ra | Радиус местоположения привода |
Модель принимает, что только кулоново трение действует в контакте поверхности барабана обуви. Обнулите относительную скорость между барабаном, и обувь производит нулевое кулоново трение. Чтобы избежать разрыва в нулевой относительной скорости, содействующая формула трения использует эту гиперболическую функцию
где:
| Параметр | Описание |
|---|---|
| μ | Эффективный коэффициент трения контакта |
| μCoulomb | Свяжитесь с коэффициентом трения |
| ωshaft | Скорость вала |
| ωthreshold | Угловой скоростной порог |
Балансировка моментов, которые действуют на каждую обувь относительно контакта, приводит к давлению, действующему в контакте поверхности барабана обуви. Уравнения для определения баланса моментов для ведущей обуви
и
где:
| Параметр | Описание |
|---|---|
| F | Сила приведения в действие |
| MN | Момент действуя на ведущую обувь из-за нормальной силы |
| MF | Момент действуя на ведущую обувь из-за силы трения |
| c | Длина руки цилиндра обеспечивает относительно контакта стержня |
| pa | Максимальное линейное давление в барабане обуви связывается с поверхностью |
| rp | Прикрепите радиус местоположения |
| θp | Угол местоположения контакта стержня |
| ra | Радиус местоположения привода |
Модель не моделирует тормоза с автоблокировкой. Если геометрия тормоза и параметры трения вызывают условие с автоблокировкой, модель производит ошибку симуляции. Тормоз самоблокирует, если момент трения превышает момент из-за нормальных сил, то есть, когда MF> MN.
Баланс моментов для запаздывающей обуви
Сетевой тормозной момент
где μvisc является вязким коэффициентом трения.
Используйте вкладку Variables, чтобы установить приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Основных переменных (Simscape).
В отличие от параметров блоков, переменные не имеют условной видимости. Вкладка Variables перечисляет все существующие основные переменные. Если переменная не используется в системе уравнений, соответствующей выбранной настройке блока, значения, заданные для этой переменной, проигнорированы.
Тормоз использует приближение длинной обуви.
Геометрия тормоза не самоблокирует.
Модель не составляет потребление потока привода.
Можно смоделировать эффекты теплового потока и изменения температуры через дополнительный тепловой порт сохранения. По умолчанию тепловой порт скрыт. Чтобы представить тепловой порт, щелкните правой кнопкой по блоку по своей модели и, из контекстного меню, выберите Simscape> Block choices. Выберите вариант, который включает тепловой порт. Задайте связанные тепловые параметры для компонента.
FПорт физического сигнала, который представляет силу приведения в действие тормоза
SВращательный порт сохранения, который представляет вращающийся вал барабана
HТепловой порт сохранения. Тепловой порт является дополнительным и является скрытым по умолчанию. Чтобы представить порт, выберите вариант, который включает тепловой порт.
Радиус барабана связывается с поверхностью. Параметр должен быть больше, чем нуль. Значением по умолчанию является 150 mm.
Расстояние между барабаном центрируется и строка силы действия. Параметр должен быть больше, чем нуль. Значением по умолчанию является 100 mm.
Расстояние между контактом стержня и центрами барабана. Параметр должен быть больше, чем нуль. Значением по умолчанию является 125 mm.
Угловая координата стержня прикрепляет местоположение от оси симметрии тормоза. Параметр должен быть больше, чем или равным нулю. Значением по умолчанию является 15 deg.
Угол между контактом стержня и начало полотна материала трения обуви. Значение параметра должно быть в области значений 0 ≤ θsb ≤ (π-pin угол местоположения). Значением по умолчанию является 5 deg.
Угол между началом и концом полотна материала трения на обуви. Значение параметра должно быть в области значений 0 <θsb ≤ (π - углу местоположения контакта - угол начала обуви). Значением по умолчанию является 120 deg.
Значение вязкого коэффициента трения в поверхности контакта. Параметр должен быть больше, чем или равным нулю. Значением по умолчанию является .01 n*m/(rad/s).
Массив температур раньше создавал 1D интерполяционную таблицу температурной эффективности. Значения массивов должны увеличиться слева направо. Значением по умолчанию является [280.0, 300.0, 320.0] K.
Этот параметр видим только, когда вы выбираете вариант блока, который включает тепловой порт.
Значение кулонового коэффициента трения в барабане пояса связывается с поверхностью. Значение больше, чем нуль. Если вы не выбираете вариант блока, который включает тепловой порт, значением по умолчанию является 0.3.
Если вы выбираете вариант блока, который включает тепловой порт, вы задаете этот параметр как массив. Массив одного размера как массив для параметра Temperature. Значением по умолчанию для теплового варианта является [0.1, 0.05, 0.03].
Угловая скорость, в которой коэффициент трения контакта практически достигает своего установившегося значения. Параметр должен быть больше, чем нуль. Значением по умолчанию является 0.01
rad/s.
Тепловая энергия, требуемая изменить температуру компонента одной степенью. Чем больше количество тепла, тем более стойкий компонент к изменению температуры. Этот параметр включен, только если вы выбираете вариант блока, который включает тепловой порт. Значением по умолчанию является 50 kJ/K.
