Компенсационные конические собакой пары муфты, собранные симметрично о переводном стопоре, чтобы обеспечить сглаженное обязательство механизма
Simscape / Автомобильная трансмиссия / Муфты
Блок представляет двусторонний синхронизатор, который содержит две компенсационных муфты собаки, две компенсационных конических муфты и один переводный стопор. Переключите перевод связи вдоль отрицательных причин направления муфты, чтобы затронуть звонок с концентратором A. Переключите перевод связи вдоль положительных причин направления муфты, чтобы затронуть звонок с концентратором B. Когда значение перевода связи сдвига меньше, чем конический разрыв кольцевого концентратора муфты, синхронизатор находится в нейтральном режиме и не передает крутящий момент.
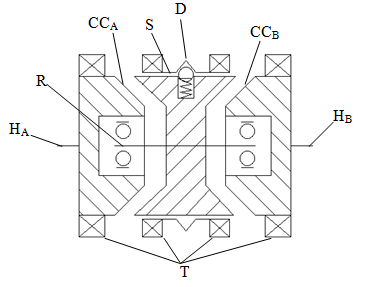
Схематическое иллюстрирует двусторонний синхронизатор в разъединенном состоянии. В этом состоянии звонок (R) и концентратор (HA и HB) валы могут вращаться независимо на различных скоростях. Как связь сдвига (S) переводит в отрицательном направлении, поверхности конической муфты A (CCA) входят в контакт. Трение в конической муфте уменьшает различие в скорости вращения между валами. Когда сила на связи сдвига превышает пиковую силу стопора (D), зубы муфты собаки (T) могут участвовать. Сила пика стопора должна быть такова, что коническая муфта имеет достаточно времени и нормальной силы, чтобы принести валы к достаточно подобным скоростям, чтобы позволить участие муфты собаки. Точно так же перевод связи сдвига вдоль положительного направления позволяет поверхностям конической муфты B (CCB) входить в контакт и может позволить валу звонка взаимодействовать с валом концентратора B (HB).
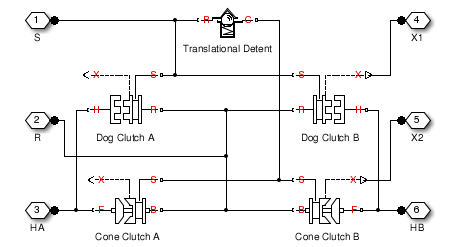
Модель реализует два блока Муфты Собаки, один Переводный Стопор и два измененных блока Муфты Собаки. Обратитесь к каждой странице с описанием блока для получения дополнительной информации о соответствующей функции блока.
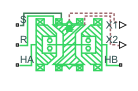
Связи R, HA и HB являются механическими вращательными портами сохранения, которые представляют звонок (R), концентратор A (HA) и концентратор B (HB), соответственно. Связь S является механическим переводным портом сохранения, который представляет кольцевой указатель переключателя.
X1 связей и X2 являются портами физического сигнала, которые выводят положения связи сдвига муфт собаки и конических муфт, соответственно. Следующие таблицы обеспечивают значения X1 и X2 в общих случаях обязательства муфты.
| Состояние муфты собаки | X1 |
|---|---|
| Разъединенный | 0 |
| Полностью занятый концентратором A | Отрицательная сумма разрыва кольцевого концентратора и зубной высоты |
| Полностью занятый концентратором B | Положительная сумма разрыва кольцевого концентратора и зубной высоты |
| Коническое состояние муфты | X2 |
|---|---|
| Разъединенный | 0 |
| Полностью занятый концентратором A | Отрицательная величина разрыва кольцевого концентратора |
| Полностью занятый концентратором B | Положительное значение разрыва кольцевого концентратора |
Значения X1 и X2 являются нулем, когда синхронизатор полностью расцеплен. Когда муфта собаки полностью занята концентратором A, X1 равен отрицательной сумме своего разрыва кольцевого концентратора и зубной высоты. Когда муфта собаки полностью занята концентратором B, X1 равен положительной сумме своего разрыва кольцевого концентратора и зубной высоты. Когда коническая муфта полностью занята концентратором A, X2 равен отрицанию своего разрыва кольцевого концентратора. Когда коническая муфта полностью занята концентратором B, X2 равен своему разрыву кольцевого концентратора.
Можно смоделировать эффекты теплового потока и изменения температуры через дополнительный тепловой порт сохранения. По умолчанию тепловой порт скрыт. Чтобы представить тепловой порт, щелкните правой кнопкой по блоку по своей модели и, из контекстного меню, выберите Simscape> Block choices. Выберите вариант, который включает тепловой порт. Задайте связанные тепловые параметры для компонента.
Модель не составляет эффекты инерции. Можно добавить блок Simscape™ Inertia в каждом порте, чтобы добавить инерцию в модель синхронизатора.
SСохранение переводного порта, который представляет связь сдвига
RСохранение вращательного порта, который представляет кольцевой вал
HAСохранение вращательного порта, который представляет вал концентратора A
HBСохранение вращательного порта, который представляет вал концентратора B
X1Выходной порт физического сигнала, который измеряет значение перевода муфты собаки
X2Выходной порт физического сигнала, который измеряет значение конического перевода муфты
TТепловой порт сохранения. Тепловой порт является дополнительным и является скрытым по умолчанию. Чтобы представить порт, выберите вариант, который включает тепловой порт.
Методы, которые доступны для параметризации передачи крутящего момента, зависят от варианта блока, который вы используете. Если вы используете вариант по умолчанию, который не имеет никакого теплового порта, вы параметризовали блок с помощью одной из опций для параметра Torque Transmission Model. Если вы выбираете вариант, который имеет тепловой порт, вы параметризовали блок на основе температуры. Модели обеспечивают эти общие параметры:
Средний радиус зубов муфты. Параметр должен быть больше, чем нуль. Значением по умолчанию является 50 mm.
Относительная угловая скорость между звонком и валами концентратора, выше которых не может участвовать муфта собаки. Значение характерно для определенной коробки передач или передачи и должно быть минимизировано, чтобы избежать высокого динамического влияния во время зацепления. Значением по умолчанию является inf rad/s.
Общие параметры для конической муфты:
Наружный диаметр полотна материала трения, которое выравнивает конические диски муфты. Параметр должен быть больше, чем нуль. Значением по умолчанию является 150 mm.
Внутренний диаметр полотна материала трения, которое выравнивает конические диски муфты. Параметр должен быть больше, чем нуль, но меньшим, чем значение Contact surface maximum diameter.
Половина угла конуса муфты. Параметр должен быть больше, чем нуль и меньше чем или равным 90 градусам. Значением по умолчанию является 12 deg.
Относительная скорость, ниже которой две поверхности могут заблокировать. Поверхности блокируют, если крутящий момент через B и вращательные порты F является меньше, чем продукт эффективного радиуса, статического коэффициента трения и прикладывавшей нормальной силы. Значением по умолчанию является 0.001 rad/s.
Нормальная сила применилась к порту N физического сигнала, применяется к контакту, только если сумма силы превышает значение параметра Threshold force. Силы ниже Threshold force не прикладываются, и нет, следовательно, никакого переданного фрикционного крутящего момента. Значением по умолчанию является 1 N.
Выберите метод параметризации, чтобы смоделировать кинетический коэффициент трения. Опции и значения по умолчанию для этого параметра зависят от варианта, который вы выбираете для блока. Опции:
Fixed kinetic friction coefficient — Обеспечьте фиксированное значение для кинетического коэффициента трения. Эта опция:
Видимо, только если вы используете вариант по умолчанию блока
Метод по умолчанию для параметризации варианта по умолчанию блока
Влияет на видимость других параметров
Table lookup kinetic friction coefficient — Задайте кинетический коэффициент трения одномерным поиском по таблице на основе относительной угловой скорости между дисками. Эта опция:
Видимо, только если вы используете вариант по умолчанию блока
Влияет на видимость других параметров
Temperature-dependent kinetic friction coefficient — Задайте кинетический коэффициент трения поиском по таблице на основе температуры. Эта опция:
Видимо, только если вы используете тепловой вариант блока
Метод по умолчанию для параметризации теплового варианта блока
Влияет на видимость других параметров
Temperature and speed-dependent kinetic friction coefficient — Задайте кинетический коэффициент трения поиском по таблице на основе температуры и относительной угловой скорости между дисками. Эта опция:
Видимо, только если вы используете вариант по умолчанию блока
Влияет на видимость других параметров
![]()
Temperature and speed-dependent kinetic friction coefficient
Пиковая сила сдвига стопора. Значением по умолчанию является 500 N.
Ширина области, где стопор показывает силу сдвига. Значением по умолчанию является 3 mm.
Вязкий коэффициент трения в поверхности контакта стопора. Параметр должен быть больше, чем или равным нулю. Значением по умолчанию является 0.1 N/(m/s).
Отношение кинетического трения к пиковой силе сдвига стопора. Параметр используется, чтобы установить значение кинетического трения. Параметр должен быть больше, чем или равным нулю. Значением по умолчанию является 0.01.
Скорость требуется для пикового кинетического трения в поверхности контакта стопора. Параметр гарантирует, что сила непрерывна, когда направление перемещения изменяется, увеличивая числовую устойчивость симуляции. Параметр должен быть больше, чем нуль. Значением по умолчанию является 0.05 m/s.
Расстояние между звонком и собакой сжимает концентратор со звонком, от которого полностью отрекаются. Параметр указывает, что максимум путешествует на расстояние, если требования обязательства не удовлетворяются. Параметр должен быть больше, чем значение Ring-hub clearance when cone clutch disengaged. Значением по умолчанию является 5 mm.
Минимальное значение зуба накладывается, вне которого муфта собаки рассматривается занятой. Параметр должен быть больше, чем нуль. Значением по умолчанию является 3 mm.
Высота собаки сжимает зубы. Параметр должен быть больше, чем нуль. Значением по умолчанию является 10 mm.
Расстояние между звонком и конусом сжимает концентратор, когда от звонка полностью отрекаются. Коническая муфта может начать участвовать, если ползунок перевел это расстояние. Звонок может путешествовать только на это расстояние, если требования обязательства не удовлетворены. Параметр должен быть больше, чем нуль. Значением по умолчанию является 3 mm.
Жесткость жестких остановок с обеих сторон собаки сжимает звонок. Модель принимает звонок, и остановки ведут себя эластично. Свяжитесь деформация пропорциональна приложенной силе и обратной величине жесткости контакта. Значение жесткости должно быть присвоено со ссылкой на параметр Tooth overlap to engage. Слишком низкая жесткость могла заставить деформацию превышать необходимое перекрытие и инициировать ложное обязательство. Параметр должен быть больше, чем нуль. Значением по умолчанию является 1e+6 N/m.
Жесткость жестких остановок с обеих сторон конического звонка муфты. Модель принимает звонок, и остановки ведут себя эластично. Свяжитесь деформация пропорциональна приложенной силе и обратной величине жесткости контакта. Параметр должен быть больше, чем нуль. Значением по умолчанию является 1e+6 N/m.
Переводное затухание контакта между собакой сжимает звонок и концентратор. Значение затухания обратно пропорционально количеству колебаний, которые происходят после влияния. Параметр должен быть больше, чем нуль. Значением по умолчанию является 1e+3 N/(m/s).
Переводное затухание контакта между конической муфтой звонит и концентратор. Значение затухания обратно пропорционально количеству колебаний, которые происходят после влияния. Параметр должен быть больше, чем нуль. Значением по умолчанию является 1e+3 N/(m/s).
Вязкий коэффициент трения для относительного переводного движения между концентратором и звонком. Значение параметра зависит от состояния смазки и качества контакта с поверхностями. Коэффициент должен быть больше, чем или равным нулю. Значением по умолчанию является 100 N/(m/s).
Начало настройки конуса и муфт собаки. Выбор включает:
Cone clutch A and dog clutch A locked
Cone clutch A locked
All clutches unlocked
Cone clutch B locked
Cone clutch B and dog clutch B locked
Настройкой по умолчанию является All clutches unlocked.
Исходное положение секции связей сдвига, которая присоединяет к муфте собаки. Значение параметра имеет следующие ограничения:
| Состояние муфты собаки | Ограничение параметра |
|---|---|
| Муфта собаки Первоначально занятый | Отрицательный из значения параметров должно быть больше, чем сумма параметров Ring-hub clearance when dog clutch disengaged и Tooth overlap to engage |
| Муфта собаки Первоначально разъединенный | Отрицательный из значения параметров должно быть меньшим, чем сумма параметров Ring-hub clearance when dog clutch disengaged и Tooth overlap to engage |
| Муфта собаки B Первоначально занятый | Значение параметров должно быть больше, чем сумма параметров Ring-hub clearance when dog clutch disengaged и Tooth overlap to engage |
| Муфта собаки B Первоначально расцепленный | Значение параметров должно быть меньшим, чем сумма параметров Ring-hub clearance when dog clutch disengaged и Tooth overlap to engage |
Значением по умолчанию является 0 mm.
Исходное положение секции связей сдвига, которая присоединяет к конической муфте. Значение параметра имеет следующие ограничения:
| Состояние муфты собаки | Ограничение параметра |
|---|---|
| Конус сжимает первоначально занятый | Отрицательный из параметра должно быть больше, чем значение Ring-hub clearance when cone clutch disengaged |
| Конус сжимает первоначально разъединенный | Отрицательный из параметра должно быть меньшим, чем значение Ring-hub clearance when cone clutch disengaged |
| Коническая муфта B первоначально занятый | Параметр должен быть больше, чем значение Ring-hub clearance when cone clutch disengaged |
| Коническая муфта B первоначально расцепленный | Параметр должен быть меньшим, чем значение Ring-hub clearance when cone clutch disengaged |
Значением по умолчанию является 0 mm.
Начальный угол между звонком и концентратором фрагменты муфты собаки. Если муфта расцеплена, начальный угол должен находиться в диапазоне-π/N ≤ θ ≤ + π/N, где N обозначает количество зубов в муфте собаки. Если муфта занята, начальный угол должен быть в области значений-δ/2 ≤ θ ≤ + δ/2, где δ является углом обратной реакции. Значением по умолчанию является 0 deg.
Этот параметр только видим, если вы выбираете вариант блока, который не включает тепловой порт и установить Dog Clutch> Torque transmission model к Dynamic with backlash.
Начальный угол между звонком и концентратором B фрагменты муфты собаки. Если муфта расцеплена, начальный угол должен находиться в диапазоне-π/N ≤ θ ≤ + π/N, где N обозначает количество зубов в муфте собаки. Если муфта занята, начальный угол должен быть в области значений-δ/2 ≤ θ ≤ + δ/2, где δ является углом обратной реакции. Значением по умолчанию является 0 deg.
Этот параметр только видим, если вы выбираете вариант блока, который не включает тепловой порт и установить Dog Clutch> Torque transmission model к Dynamic with backlash.
Эти тепловые параметры только видимы, когда вы выбираете вариант блока, который включает тепловой порт.
Тепловая энергия, требуемая изменить температуру компонента одной степенью. Чем больше количество тепла, тем более стойкий компонент к изменению температуры. Значением по умолчанию является 100 kJ/K.
Температура компонента в начале симуляции. Начальная температура изменяет эффективность компонента согласно вектору эффективности, который вы задаете, влияя на запутывающий запуск или потери трения. Значением по умолчанию является 300 K.
Чтобы оптимизировать вашу модель для линеаризации, используйте Dog Clutch> настройка по умолчанию параметра Torque transmission model, Friction clutch approximation - Suitable for HIL and linearization.
Для оптимальной производительности симуляции используйте Dog Clutch> настройка по умолчанию параметра Torque transmission model, Friction clutch approximation - Suitable for HIL and linearization.
