Пример sdl_transmission_4spd_crcr моделирует реалистическую передачу. Это использует подсистему передачи С 4 скоростями CR-CR, чтобы передать движение и крутящий момент от одного вала и инерции другому.
CR-CR модель передачи с 4 скоростями
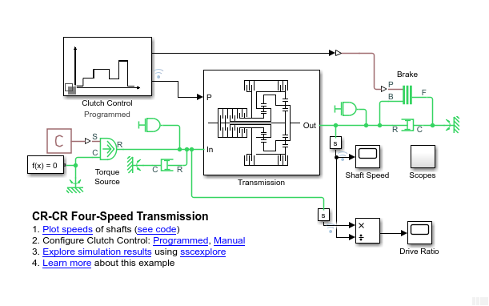
Существует постоянный ведущий крутящий момент с источника крутящего момента на вал драйвера (Блок Inertia слева). Две подсистемы затухания применяют тяжелое и легкое вязкое трение к драйверу и управляемым валам, соответственно. Две подсистемы осциллографа измеряют давления муфты. Рабочее пространство модели задает существенные параметры для блоков. Для получения информации о создании видят доступ и замена переменных рабочего пространства модели, Задают Источник для Данных в Рабочем пространстве модели (Simulink) и Данные о Рабочем пространстве модели Изменения (Simulink).
Подсистема передачи С 4 скоростями CR-CR связывает драйвер с управляемым валом (Блок Inertia справа). Если передача расцеплена, муфта тормоза и фиксированный корпус позволяют вам тормозить управляемый вал.
Для ясности главные шины сигнала модели были связаны как векторы и направили использование Goto и От блоков. Давления Муфты собраны в подсистеме Осциллографов для удобства.
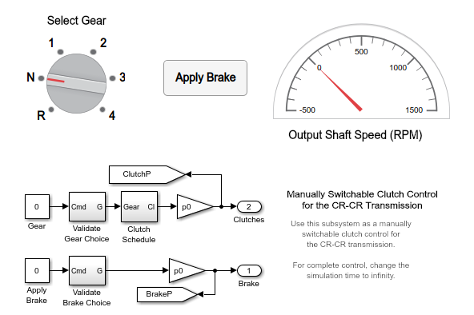
Модель представляет систему управления муфты с помощью Различного блока Subsystem. Чтобы переключиться между Programmed и Manual, два режима управления муфты, которые обеспечивает вариант, щелкают по ссылкам в окне модели. Во время симуляции ручная подсистема обеспечивает прямое управление переключениями передач. Переключить механизмы в режим ручного управления:
На панели инструментов Simulink® измените время симуляции на inf.
Запустите симуляцию.
Коробки передач во время использования виджета Select Gear.
Ручное управление муфтой для передачи CR-CR