

Начальное объединенное положение и скорость
Первое поколение/Sensors & Actuators
Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Блок Joint Initial Condition Actuator предоставляет примитивы призматического и шарнирного соединения блока Joint с данными о начальном значении. Начальные значения являются положениями и скоростями объединенных примитивов и полностью задают начальное состояние движения (начальное кинематическое состояние) тех примитивов.
Можно установить исходные положения и скорости для двух типов примитивов:
Переводные начальные условия для призматического примитива, с точки зрения линейного положения и скорости
Вращательные начальные условия для закрученного назад примитива, с точки зрения углового положения и скорости
Этот блок может привести в действие один, некоторые или все призматические и закрученные назад примитивы Соединения.
Объединенный Начальный Привод Условия применяет начальное состояние вдоль/о объединенной оси в системе координат привязки (CS), заданный для того объединенного примитива в диалоговом окне Соединения. Соединение соединяет основу и Тело последователя. Последовательность основного последователя определяет смысл сигнала приведения в действие.
Вывод является портом коннектора, который вы соединяете с блоком Joint, начальные условия которого вы хотите установить. Вы устанавливаете начальные линейные и/или угловые положения и скорости в диалоговом окне блока, таким образом, нет никакого входного сигнала.
Вы не можете привести в действие Сферический или сферический примитив с Объединенным Начальным Приводом Условия.
Вы не можете одновременно привести в действие объединенный примитив с Объединенным Начальным Приводом Условия и с Объединенным приведением в действие движения Привода.
Когда вы создаете свою модель, геометрическая настройка Тел (домашняя настройка) неявно задает начальные положения/углы тел друг относительно друга и к Миру. Земля, Тело и Объединенное размещение задают только начальные координаты (степени свободы или DoFs), не их соответствующие скорости. Запуск симуляции в этом состоянии обнуляет все начальные скорости. Можно установить полное начальное кинематическое состояние (начальная настройка), и положения и скорости, объединенных примитивов при помощи Объединенных Начальных блоков Привода Условия.
В модели Simscape Multibody DoFs, представленные Соединениями, относительны. Предположим, что вы приводите в действие Соединение с начальными условиями, и что Соединение имеет другие Соединения в последовательности, соединенной с ним через промежуточные Тела. Затем начальные условия применились к первому Соединению, меняют абсолютные положения и скорости других Соединений (как измерено в Мире), потому что начальные условия других Соединений заданы относительно первого.
Одно исключение к этому правилу происходит, если приводимое в действие Соединение является частью замкнутого цикла. Симуляция Simscape Multibody сокращает одно Соединение в каждом замкнутом цикле. Начальные условия применились к Соединению, косвенно влияют на начальные условия других связанных Соединений только до (но не включая) Соединение сокращения.
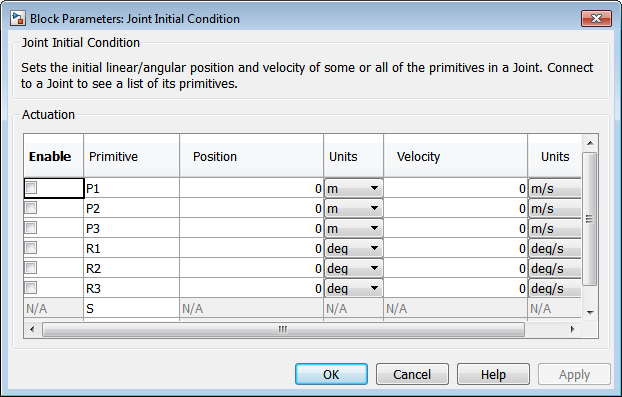
Диалоговое окно имеет одну активную область, Actuation.
Пункты меню доступны для каждого примитива в Соединении, с которым соединяется Объединенный Начальный Привод Условия. Если вы соединяете Привод с его открытым диалоговым окном, примитивный список автоматически обновляется, чтобы отразить примитивы связанного Соединения. Если Привод не связан, все типы примитивов показывают, включая два, который не может быть приведен в действие, не сферический (S) и сварка (W).
Установите этот флажок, если вы хотите привести в действие примитив с начальными условиями. Значение по умолчанию не выбрано.
Отображает имя примитива в Соединении. Не активное поле.
Введите значение для исходного положения примитива, или призматического или закрученного назад. Значением по умолчанию является 0.
В выпадающем меню выберите модули для исходного положения. Значениями по умолчанию является m (метры) для призматических примитивов и deg (степени) для закрученных назад примитивов.
Введите значение для начальной скорости примитива, или призматического или закрученного назад. Значением по умолчанию является 0.
В выпадающем меню выберите модули для начальной скорости. Значениями по умолчанию является m/s (метры/секунда) для призматических примитивов и deg/s (степени/секунда) для закрученных назад примитивов.
Вот Объединенный Начальный Привод Условия, соединенный с Пользовательским Соединением, которое соединяет два Тела:
Необходимо добавить порт Actuator (порт коннектора) к блоку Joint, чтобы соединить Объединенный Начальный Привод Условия с ним. Основа (B) - последовательность последователя (ф) Боди на двух сторонах Соединения решает, что смысл Объединенной Начальной буквы Подготавливает данные о Приводе.
Объединенный привод, объединенный датчик, объединенный привод прилипания, механическое устройство, переходящее панель, призматическая, закрученная назад
Смотрите Используя Блоки JICA для того, чтобы установить общие начальные условия (положения и скорости) Соединения DoFs. Циклы Схемы Металлорежущего станка и Проверяющий Образцовую Топологию обсуждают, как симуляция Simscape Multibody сокращает Соединения в замкнутых циклах.