

Ослабленная линейная сила осциллятора или крутящий момент, действующий на соединение
Первое поколение / Обеспечивает Элементы

Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
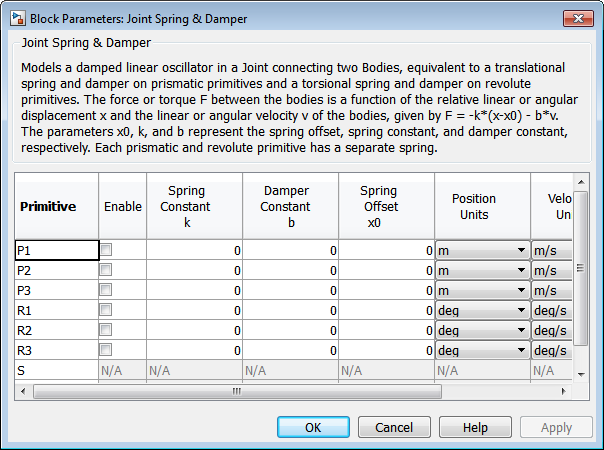
Joint Spring & Damper block моделирует ослабленную линейную силу осциллятора, действующую вдоль призматического примитива или ослабленного линейного крутящего момента осциллятора, действующего о закрученном назад примитиве. Объединенные примитивы соединяются между двумя телами и силой или закручивают действия между этими телами. Знак силы или крутящего момента установлен основой (B) - (F) последовательность к последователю тел. Эти модели представляют ослабленные линейные переводные и крутильные пружины в призматических и закрученных назад случаях, соответственно.
Вы соединяете этот блок с Соединением в одном из портов датчика/привода Соединения. (Если Соединение испытывает недостаток в порте датчика/привода, откройте его диалоговое окно и создайте то.) Соединение представляет любую смесь переводных и вращательных степеней свободы (DoFs). С Joint Spring & Damper block вы можете затем применить любую комбинацию ослабленных линейных сил осциллятора на любом prismatics и ослабили линейные крутящие моменты скрученности на любом revolutes.
Каждая Joint Spring & Damper block, соединенная с закрученным назад примитивом, добавляет нормальное состояние Simulink® в вашу модель.
Эта функция не изменяет механические состояния вашей модели.
Соедините два Тела с Соединением, имеющим некоторую комбинацию призматических и закрученных назад примитивов.
Joint Spring & Damper использует Объединенный Датчик, чтобы измерить степень свободы в Соединении. Эти значения измеряются относительно домашней настройки степени свободы, ее состояние перед применением начальных приводов условия и блоком демонтированных соединений.
Если x представляет смещение вдоль призматической оси и v =, dx/dt является линейной скоростью призматического DoF, то ослабленная пружинная сила, действующая вдоль этого призматического и между Телами, соединенными этим Соединением,
F =-k (x - x 0) - bv
Параметры модели являются коэффициентом упругости k, длина родника (сместила) x 0 и ослабляющий постоянный b. Естественная длина является продолжительностью пружины без сил, действующих на него, и должна быть неотрицательной: x 0 ≥ 0. Стабильная пружина требует k> 0. Рассеяние представления затухания и соблюдение второго закона термодинамики требуют b ≥ 0. Можно использовать отрицательный b, чтобы представлять энергетическое нагнетание.
Если θ представляет смещение о закрученной назад оси и ω =, dθ/dt является угловой скоростью закрученного назад DoF, то ослабленный крутящий момент скрученности, действующий об этом закрученном назад и между Телами, соединенными этим Соединением,
τ =-k (θ - θ0) - b ω
Параметры модели являются скрученностью постоянный k, естественный угол скрученности (сместил) θ0 и ослабляющий постоянный b. Естественный угол является направлением баланса скрученности без крутящих моментов, действующих на него, и может иметь любой знак. Стабильная скрученность требует k> 0. Рассеяние представления затухания и соблюдение второго закона термодинамики требуют b ≥ 0. Можно использовать отрицательный b, чтобы представлять энергетическое нагнетание.
Списки меню все активные примитивы в Соединении, с которым соединяется Joint Spring & Damper block. Если вы соединяете Joint Spring & Damper с ее открытым диалоговым окном, примитивный список автоматически обновляется, чтобы отразить примитивы связанного Соединения.
Перечисляет активные примитивы в Соединении, с которым соединяется блок. P представляет призматический примитив, R закрученный назад примитив, S сферический примитив, и W примитивная сварка.
Чтобы включить силу или приведение в действие крутящего момента на каком-то конкретном примитиве в Соединении, установите флажок Enable рядом с именем того примитива в Примитивном столбце. Вы не можете привести в действие сферический или сварить примитивы.
Введите пружину или скрученность постоянный k, для призматического или закрученного назад примитива, соответственно. Значением по умолчанию является 0.
Модули для k выведены неявно от вашего выбора положения и обеспечивают/закручивают модули.
Введите пружину или скрученность, ослабляющую постоянный b, для призматического или закрученного назад примитива, соответственно. Значением по умолчанию является 0.
Модули для b выведены неявно от вашего выбора скорости и обеспечивают/закручивают модули.
Введите длину родника x 0 или естественный угол скрученности θ0, для призматического или закрученного назад примитива, соответственно. Значением по умолчанию является 0.
В выпадающем меню выберите линейные или угловые модули для призматических или закрученных назад примитивов, соответственно. Значением по умолчанию является m (метры) или deg (степени).
В выпадающем меню выберите линейные или угловые скоростные единицы для призматических или закрученных назад примитивов, соответственно. Значением по умолчанию является m/s (метры/секунда) или deg/s (степени/секунда).
В выпадающем меню выберите силу или закрутите модули для призматических или закрученных назад примитивов, соответственно. Значением по умолчанию является N (ньютоны) или N*m (ньютон-метры).
Тело, Body Spring & Damper, пользовательское соединение, объединенный привод, объединенный датчик, призматический, закрученный назад
Смотрите добавляющие внутренние силы.