

Ослабленный линейный осциллятор обеспечивает между двумя телами
Первое поколение / Обеспечивает Элементы

Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Body Spring & Damper block моделирует силу ослабленной пружины, действуя между двумя телами. Согласно третьему закону Ньютона, пружина прикладывает равные и противоположные силы к этим двум телам. Можно использовать этот блок Force Element, чтобы смоделировать любого линейного (закон Гука) сила с постоянными коэффициентами, которая действует между парой тел.
Вы соединяете Body Spring & Damper между двумя системами координат Тела (CSS), каждый на одном теле. Вектор между CSS Тела задает направление и продолжительность пружины. Одним из Тел может быть Земля.
Пружина и демпфер обеспечивают действие только вдоль оси, соединяющей два CSS Тела.
Body Spring & Damper не имеет никаких степеней свободы (DoFs).
Body Spring & Damper block содержит блок Shared Environment. Подмашины, соединенные с любой стороной этого блока, составляют одну составную машину, которая требует точно одного блока Machine Environment, но по крайней мере одного Основания для каждой подмашины.
Body Spring & Damper block не является Соединением и не может распространить смежные системы координат от Тела на одной стороне к Телу с другой стороны.
Одно Тело соединяется с одной стороной Body Spring & Damper в одном из CSS того Тела. При попытке задать тот CS с точки зрения смежного CS (связанный CS другого Тела, соединенного с другой стороной), первое Тело не может обнаружить связанный CS второго тела. Если необходимо задать смежный CSS по обе стороны от Body Spring & Damper, добавьте блок Joint параллельно с пружинным демпфером.
Представлять DoFs одного тела относительно другого, также
Соедините одно или несколько Соединений последовательно с Телами.
Создайте дополнительный CSS Тела на каждом теле и соедините их с Соединением параллельно с Body Spring & Damper. Чтобы создать параллельную территорию, вставьте дополнительные Наземные блоки.
Можно добавить больше Объединенных блоков между Телами, чтобы представлять один, два, или три призматических примитива. Используйте Призматические блоки или блок Custom Joint, чтобы выполнить это.
Вы соединяете этот блок с каждым Телом, A или B, в системе координат (CS) Тела. Если r A и r B является положениями их, Придают форму CSS, относительным радиус-вектором, соединяющим их, является r = r B - r A. Расстояние разделения является |r |. Относительной скоростью является v = d r /dt. Затем векторная сила, которую тело A проявляет на теле B,
Первый срок представляет пружинную или линейную силу смещения. Второе представляет демпфер или скоростную силу рассеяния, которая действует только вдоль направления r. Таким образом демпфер эквивалентен dashpot, не вязкому носителю.
Вы задаете
Коэффициент упругости k. Стабильная пружина требует k> 0.
Длина родника (сместила) r 0. Естественная длина является продолжительностью пружины без сил, действующих на него, и физически должна быть неотрицательной: r 0 ≥ 0.
Ослабляющий постоянный b. Рассеяние представления затухания и соблюдение второго закона термодинамики требуют b ≥ 0. Можно использовать отрицательный b, чтобы представлять энергетическое нагнетание.
В определенных случаях ломается формула силы, и блок использует правила особого случая, чтобы определить силу пружинного демпфера.
Избегать особенностей в начальном состоянии движения, убеждаться установить начальные условия тел положения и скорости к физически разумным значениям.
Сингулярные случаи включают следующее:
Если и r 0 и v ≠ 0, и r = 0 в некоторый момент, оба условия в силе становятся сингулярными. Пружинная сила повторно спроектирована вдоль вектора скорости. Таким образом, v / | v | заменяет r / | r | в обоих условиях закона о силе, однажды в первом сроке и дважды во втором. Если r состояния = 0 не сохраняется больше момента, эта замена не имеет никакого эффекта на движение.
Если r 0 ≠ 0, и и r и v = 0 в некоторый момент, направление силы не определено. Симуляция останавливается с ошибкой.
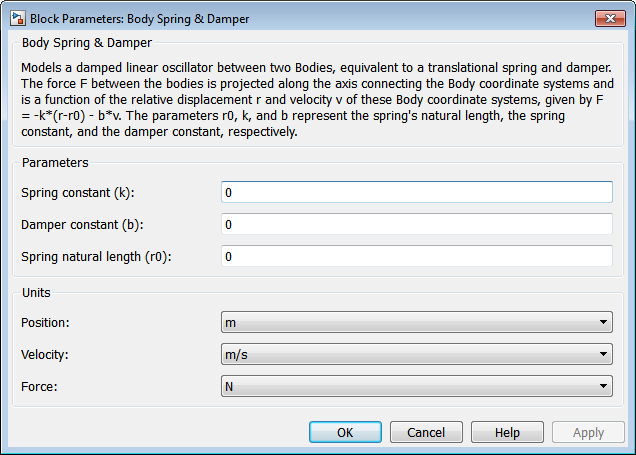
Диалоговое окно имеет две активных области, Parameters и Units.
Введите линейную пружинную силу постоянный k. Значением по умолчанию является 0.
Модули для k выведены неявно от вашего выбора положения и обеспечивают модули.
Войдите линейное затухание обеспечивают постоянный b. Значением по умолчанию является 0.
Модули для b выведены неявно от вашего выбора скорости и обеспечивают модули.
Войдите естественная продолжительность пружины (сместила) r 0. Значением по умолчанию является 0.
В выпадающем меню выберите модули для относительного радиус-вектора r. Значением по умолчанию является m (метры).
В выпадающем меню выберите модули для относительного вектора скорости v. Значением по умолчанию является m/s (метры/секунда).
В выпадающем меню выберите, модули для пружинного демпфера обеспечивают F, действующий между телами. Значением по умолчанию является N (ньютоны).
Это - простое, но представительное использование Body Spring & Damper.
Тело, Body Actuator, Body Sensor, Custom Joint, Ground, Joint Spring & Damper, среда машины, призматическая, общая среда
Смотрите добавляющие внутренние силы.