Смоделируйте динамику трехфазного круглого ротора или существенно-полюсной синхронной машины
Simscape / Электрический / Специализированные Энергосистемы / Основные Блоки / Машины
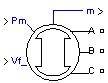
Блок Synchronous Machine действует в генераторе или моторных режимах. Рабочий режим диктует знак механической энергии (положительный для режима генератора, отрицательного для моторного режима). Электрическая часть машины представлена моделью в пространстве состояний шестого порядка, и механическая деталь эквивалентна в блоке Simplified Synchronous Machine.
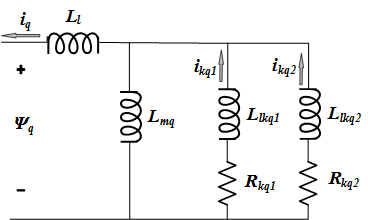
Модель учитывает динамику статора, поля и обмоток демпфера. Эквивалентная схема модели представлена в кадре ссылки ротора (qd кадр). Все параметры ротора и электрические количества просматриваются от статора. Они идентифицированы запущенными переменными. Индексы:
d,q — d-и количество q-оси
R,s — Ротор и количество статора
l,m — Утечка и индуктивность намагничивания
f,k — Поле и демпфер извилистое количество
Электрическую модель машины показывают в этих схемах.
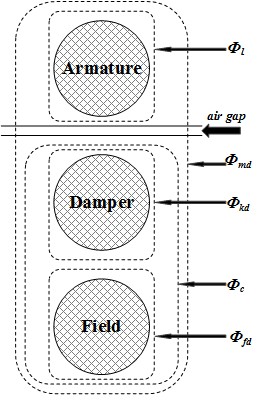
Обычная теория Синхронного моделирования Машины для анализа устойчивости принимает, что взаимная индуктивность между арматурой, демпфером и полем на обмотках прямой оси идентична. Обычно обмотки демпфера около воздушного зазора, и в результате поток, соединяющий схемы демпфера, почти равен арматуре соединения потока. Эта гипотеза производит приемлемые результаты для широкого спектра исследований устойчивости, особенно те из networkside. Однако когда дело доходит до поля текущие исследования, существует значительная ошибка. Динамическая модель эквивалентной схемы синхронной машины может включать дополнительную индуктивность, представляющую различие между полевым демпфером и полевой арматурой взаимная индуктивность на D-оси [1]. Эта индуктивность обычно называется Canay inductance. Индуктивность Canay соответствует потоку утечки, ΦC, в следующей фигуре и интерпретирована как корректирующий элемент в эквивалентной модели, которая может иметь отрицательную величину [2].
Стандарт IEEE 1110-2002 [3] подарки прямые и квадратичные оси синхронной динамической модели машины как показано в схемах.
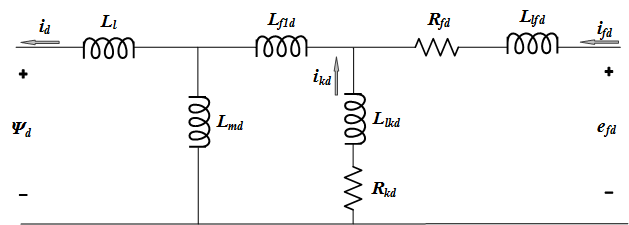
Соответствующие уравнения:
Блок Synchronous Machine SI Fundamental и Синхронная Машина pu блок Fundamental позволяют вам задавать основные параметры синхронной машины. Вы вводите поле и параметры обмоток демпфера (сопротивления, индуктивность утечки и взаимная индуктивность) в SI (Ω, H) или в pu. При вводе параметры в SI, параметры RL поля и обмоток демпфера не являются фактическими значениями поля RL машины, но значения RL упомянули статор.
Можно вычислить основные значения для статора и обмоток ротора, когда параметры заданы в pu. Можно также вычислить коэффициент трансформации Статора/Поля, и полевые параметры упомянули статор от фактических полевых параметров (обмотки значения RL, номинальное полевое напряжение и номинальное текущее поле).
Эта таблица показывает базовые значения статора.
| Основное напряжение статора = достигает максимума номинальное напряжение строки-к-нейтральному (V) |
| Основной статор, текущий (A) |
| Основной импеданс статора (Ω) |
| Основывайте угловую частоту (rad/s) |
| Основная индуктивность статора (H) |
Где:
Pn = трехфазная номинальная степень (ВА)
Vn = номинальная строка к линейному напряжению (Vrms)
fn = номинальная частота (Гц)
ifn = номинальное поле текущее производящее номинальное напряжение статора ни при какой загрузке (A)
Параметры статора, чтобы задать в блоке Synchronous Machine SI Fundamental:
Rs = сопротивление статора на фазу (Ω)
Ll = индуктивность утечки статора (H)
Lmd = индуктивность намагничивания прямой оси, просматриваемая от статора (H)
Lmq = индуктивность намагничивания квадратурной оси, просматриваемая от статора (H)
Параметры статора, чтобы ввести в Синхронную Машину pu блок Fundamental:
| Сопротивление статора на фазу (pu) |
| Индуктивность утечки статора (pu) |
| Индуктивность намагничивания прямой оси (pu) |
| Индуктивность намагничивания квадратурной оси (pu) |
Эти данные показывают одну фазу статора, вьющегося вместе с обмоткой возбуждения.
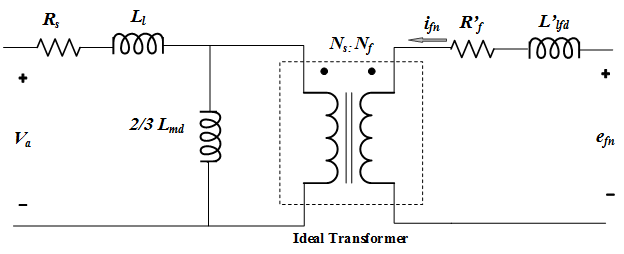
В схеме:
Ns и Nf являются эквивалентным количеством синусоидально распределенных поворотов обмотки статора и обмотки возбуждения, соответственно.
Rs и Ll являются сопротивлением статора и индуктивностью утечки.
Rf ′ и Llfd ′ является полевым сопротивлением и индуктивностью утечки.
Когда три обмотки статора включены с трехфазным напряжением положительной последовательности, и обмотка возбуждения открыта, индуктивностью намагничивания статора является Lmd. Однако, когда только одна фаза включена, и обмотка возбуждения открыта, индуктивностью намагничивания является 2/3 Lmd, как показано в фигуре.
Ни при какой загрузке, когда обмотка возбуждения вращается на номинальной скорости и переносит номинальный полевой постоянный ток ifn, амплитудой напряжения переменного тока (пиковое значение), вызванное на одной фазе статора, является Vsbase.
Максимальная взаимная индуктивность между одной обмоткой статора и обмоткой возбуждения получена, когда эти две обмотки выравниваются. Этим дают:
из которого мы выводим коэффициент трансформации:
Коэффициент трансформации может быть также выражен как:
где Ifbase является основным текущим полем. Таблица показывает, как вычислить полевые базовые значения.
Эта таблица показывает полевые базовые значения.
| Основное поле, текущее (A) |
| Основное полевое напряжение (V) |
| Основной полевой импеданс (Ω) |
| Основная полевая индуктивность (H) |
Фактические полевые параметры:
| Rf ′ является полевым сопротивлением (Ω) |
| Llfd ′ является полевой индуктивностью утечки (H) |
Полевые параметры, чтобы ввести в Синхронную Машину pu меню блока Fundamental:
| Полевое сопротивление (pu) |
| Полевая индуктивность утечки (pu) |
Полевые параметры, чтобы войти в блок Synchronous Machine SI Fundamental являются полевым сопротивлением, и индуктивность утечки упомянула статор (Rf, Llfd).
Если номинальное поле, текущий ifn известен, коэффициент трансформации Ns/Nf, вычисляется с помощью того же уравнения что касается коэффициента трансформации статора/поля.
По словам Краузе [4], полевое напряжение и текущий упомянуло статор (Vf, If) выведены из фактического Vf ′, If ′ значения можно следующим образом:
Когда фактическое полевое сопротивление, Rf ′ и индуктивность утечки, Llfd ′ (замеченный по ротору) известен, значения, упомянул статор:
Когда номинальное текущее поле не известно, и если pu значения полевого сопротивления и индуктивности утечки известны (Rf_pu, Llfd_pu), соответствующие значения SI упомянули статор, вычисляются можно следующим образом:
Те же преобразования используются для параметров RL обмоток демпфера.
То, когда вы задаете номинальное текущее поле, сигнал применился к входу Vf, соответствует фактическому полевому напряжению, как в реальной жизни. Поле, текущее возвращенный измерением вывод также, соответствует фактическому полю текущий If.
Номинальным полевым напряжением, производящим номинальное напряжение статора ни при какой загрузке, дают:
То, когда вы не задаете номинальное текущее поле, сигнал применился к входу Vf, соответствует фактическому полевому напряжению, упомянул статор. В этом случае номинальное полевое напряжение упомянуло статор, производящий номинальное напряжение статора ни при какой загрузке:
Поле, текущее возвращенный измерением, вывод является текущим полем, упомянуло статор. Номинальное текущее поле упомянуло статор:
Напряжение, примененное во входе Vf Синхронной Машины pu блок Fundamental, нормировано относительно номинального полевого напряжения так, чтобы 1 вход pu произвел 1 pu напряжение статора ни при какой загрузке. Если текущий возвращенный измерением вывод блока также нормирован относительно номинального поля, текущего так, чтобы 1 вход pu произвел If = 1 pu.
В зависимости от доступности данных можно выбрать один из трех Синхронных блоков Машины от библиотеки Simscape™ Electrical™ Specialized Power Systems (powerlib):
Синхронный блок Machine SI Fundamental — Задает статор, поле и фундаментальные параметры обмоток демпфера (сопротивления, индуктивность утечки и взаимная индуктивность) в SI (Ω и H). При вводе параметры в SI, параметры RL поля и обмоток демпфера не являются фактическими значениями поля RL машины, но значения RL упомянули статор.
Синхронная Машина pu блок Fundamental — Задает основные параметры в pu и для статора и для стороны ротора.
Синхронная Машина pu блок Standard — Задает стандартные параметры, также известные как операционные параметры, синхронной машины (установившиеся, переходные, и/или подпереходные реактивные сопротивления и временные константы), как введено к блоку. Как правило, производители машины обеспечивают операционные параметры.
В аналитическом программном обеспечении энергосистемы синхронные уравнения машины обычно решаются с помощью прямого нулевого квадратурой метода преобразования. Чтобы упростить вычисление, рассмотрите использование нормированных pu параметров. Для Синхронной Машины pu блок Fundamental, определенные данные передаются непосредственно процессу решения уравнений. В случае блока Synchronous Machine SI Fundamental параметры стороны ротора переданы стороне статора и нормированы прежде, чем ввести итоговую обработку. Когда вы выбираете Synchronous Machine pu блок Standard, метод перевода данных требуется, чтобы вычислять основные параметры от стандартных параметров [2], [3]. Метод перевода данных может перевести основные параметры в операционные параметры и наоборот.
Обеспечивает набор предопределенных электрических и механических параметров для различных синхронных оценок машины степени (кВА), напряжение от фазы к фазе (V), частота (Гц) и оцененная скорость (об/мин).
Выберите одну из предварительно установленных моделей, чтобы загрузить соответствующие электрические и механические параметры в записях диалогового окна. Выберите No (значение по умолчанию), если вы не хотите использовать предварительно установленную модель, или если вы хотите изменить некоторые параметры предварительно установленной модели, как описано ниже.
Когда вы выбираете предварительно установленную модель, электрические и механические параметры во вкладке Parameters диалогового окна становятся немодифицируемыми (недоступный). Начать с данной предварительно установленной модели и затем изменить параметры машины:
Выберите предварительно установленную модель, что вы хотите инициализировать параметры.
Измените значение параметров Preset model на No. Это действие не изменяет параметры машины. Путем выполнения так, вы только повреждаете связь с конкретной предварительно установленной моделью.
Измените параметры машины, как вы хотите, затем нажмите Apply.
Позволяет вы, чтобы выбрать механическую энергию обратились к валу или скорости ротора как вход Simulink® блока, или представлять вал машины Simscape вращательный механический порт.
Выберите Mechanical power Pm (значение по умолчанию), чтобы задать вход механической энергии в W или в pu и маркировке изменения входа блока к Pm. Скорость машины определяется инерцией машины J (или инерцией постоянный H для pu машины) и различием между механическим крутящим моментом Tm, следуя из поданного механического питания Pm, и внутренним электромагнитным крутящим моментом Te. Соглашение знака для механической энергии состоит в том, когда скорость положительна, положительный сигнал механической энергии указывает на режим генератора, и отрицательный сигнал указывает на моторный режим.
Выберите Speed w, чтобы задать вход скорости в rad/s или в pu и маркировке изменения входа блока к w. Скорость машины наложена, и механическая деталь модели (инерция постоянный H) проигнорирована. Используя скорость, когда механический вход позволяет моделировать механическое устройство, связывающееся между двумя машинами.
Следующая фигура указывает, как смоделировать жесткое соединение вала в моторной генераторной установке, где обе машины являются синхронными машинами.
Скорость вывод машины 1 (двигатель) соединяется с входом скорости машины 2 (генератор). В этой фигуре крутящий момент трения проигнорирован в машине 2. Поэтому его электромагнитный крутящий момент, вывод Te соответствует механическому крутящему моменту Tm, применился к валу машины 1. Соответствующая механическая входная мощность машины 1 вычисляется как Pm = Tm *w. Фактор Kw учитывает единицы скорости обеих машин (pu или rad/s) и отношение коробки передач w2/w1. Фактор KT учитывает модули крутящего момента обеих машин (pu или N.m) и оценки машины. Кроме того, как инерция J2 проигнорирован в машине 2, J2 упомянул машину, 1 скорость должна быть добавлена, чтобы обработать 1 инерцию машинным способом J1.
Выберите Mechanical rotational port, чтобы добавить в блок механическое устройство Simscape вращательный порт, который позволяет связь вала машины с другим валом машины или с другими блоками Simscape, имеющими механические вращательные порты. Вход Simulink, представляющий механическую энергию Pm или скорость w машины, затем удален из блока.
Следующая фигура указывает, как соединить Идеальный Исходный блок Крутящего момента с библиотеки Simscape на вал машины, чтобы представлять машину в моторном режиме, или в режиме генератора, когда скорость ротора положительна.
Задайте тип ротора: Salient-pole (значение по умолчанию) или (цилиндрический) Round. Этот выбор влияет на количество схем ротора на q-оси (обмотки демпфера).
Когда этот флажок устанавливается, измерение, вывод использует имена сигнала, чтобы идентифицировать метки шины. Выберите эту опцию для приложений, которые требуют, чтобы метки сигнала шины имели только алфавитно-цифровые символы.
Когда этот флажок снимается (значение по умолчанию), измерение, вывод использует определение сигнала, чтобы идентифицировать метки шины. Метки содержат неалфавитно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink.
Общая трехфазная полная мощность Pn (ВА), строка к линейному напряжению RMS Vn (V), частота fn (Гц) и поле текущий ifn (A). Значением по умолчанию является [ 187E6 13800 60 1087 ].
Номинальное текущее поле является током, который производит номинальное терминальное напряжение при условиях без загрузок. Эта модель была разработана со всеми количествами, просматриваемыми от статора, как объяснено в Краузе [4]. Номинальное текущее поле позволяет вычислить коэффициент трансформации машины, которая позволяет, вы, чтобы применить полевое напряжение просмотрели от ротора, как в реальной жизни. Это также позволяет текущее поле, который является переменной в выходном векторе модели, чтобы быть просмотренным от ротора.
Если значение номинального текущего поля не известно, необходимо ввести 0 или оставить его незаполненный. Поскольку коэффициент трансформации не может быть определен в этом случае, необходимо применить полевое напряжение, как просматривается от статора. Поле, текущее в выходном векторе, также просматривается от статора.
Сопротивление Rs (Ω), индуктивность утечки Lls (H), и d-ось и q-ось, намагничивающая индуктивность Lmd (H) и Lmq (H) и индуктивность Canay. Если значение индуктивности Canay в не известный, необходимо ввести 0 или оставить его незаполненный. Значением по умолчанию является [ 2.9069E-03 3.0892E-04 3.2164E-03 9.7153E-04 ].
Полевое сопротивление Rf (Ω) и индуктивность утечки Llfd (H), оба упомянули статор. Значением по умолчанию является [ 5.9013E-04 3.0712E-04 ].
Сопротивление d-оси Rkd (Ω) и индуктивность утечки Llkd (H), сопротивление q-оси Rkq1 (Ω) и индуктивность утечки Llkq1 (H), и (только если круглый ротор) сопротивление q-оси Rkq2 (Ω) и индуктивность утечки Llkq2 (H). Все эти значения отнесены в статор. Значением по умолчанию является [ 1.1900E-02 4.9076E-04 2.0081E-02 1.0365E-03 ].
Коэффициент инерции J (kg.m2), фактор трения F (N.m.s) и количество пар полюса p. Крутящий момент трения Tf пропорционален скорости ротора ω (Tf = F.ω.) Tf выражается в N.m, F в N.m.s и ω в rad/s). Значением по умолчанию является [ 3.895e6 0 20 ].
Начальное отклонение скорости Δω (% номинальной скорости), электрический угол ротора Θe (степени), строка текущие значения ia, ib, ic (A) и углы фазы pha, phb, phc (степени) и начальное полевое напряжение Vf (V). Можно вычислить эти значения автоматически при помощи инструмента Load Flow или инструмента Machine Initialization блока powergui. Значением по умолчанию является [ 0 0 0 0 0 0 0 0 70.3192 ] .
Можно задать начальное полевое напряжение одним из двух способов. Если вы знаете, что номинальное текущее поле (первая строка, последний параметр), в диалоговом окне, входит, начальное полевое напряжение в DC вольт упомянуло ротор. В противном случае введите нуль как номинальное текущее поле, и укажите, что начальное полевое напряжение в DC вольт упомянуло статор. Можно определить номинальное полевое напряжение, просматриваемое от статора путем установки флажка Display Vfd which produces a nominal Vt на вкладке Advanced.
Задает, должно ли магнитное насыщение ротора и железа статора быть моделировано или нет. Значение по умолчанию очищено.
Параметры кривой насыщения без загрузок. Магнитное насыщение статора и железа ротора моделируется кусочными точками определения линейного соотношения на кривой насыщения без загрузок. Первая строка этой матрицы содержит значения полевых токов. Вторая строка содержит значения соответствующих терминальных напряжений. Первая точка (первый столбец матрицы) должна отличаться от [0,0]. Эта точка соответствует точке, где эффект насыщения начинается. Значением по умолчанию является [695.64,774.7,917.5,1001.6,1082.2,1175.9,1293.6,1430.2,1583.7;9660,10623,12243,13063,13757,14437,15180,15890,16567].
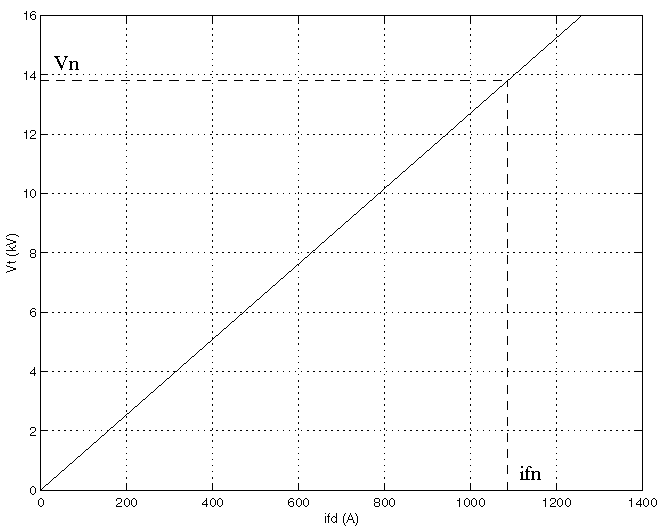
Необходимо установить флажок Simulate saturation, чтобы моделировать насыщение. Установка этого флажка позволяет вам вводить матрицу параметров для симуляции насыщения. Если вы не хотите моделировать насыщение в своей симуляции, не устанавливайте флажок Simulate saturation. В этом случае отношение между ifd и полученным Vt линейно (никакое насыщение).
Нажмите Plot, чтобы просмотреть кривую насыщения без загрузок.
Общая трехфазная полная мощность (ВА), строка к линейному напряжению RMS (V), частота (Гц) и поле, текущее (A).
Эта строка идентична первой строке основных параметров в диалоговом окне SI, за исключением того, что вы не задаете номинальное текущее поле. Это значение не требуется здесь, потому что нам не нужен коэффициент трансформации. Поскольку количества ротора просматриваются от статора, они преобразованы в pu использование базовых количеств статора, выведенных от предшествования трем номинальным параметрам. Значением по умолчанию является [ 187E6 13800 60].
Сопротивление Rs (Ω), индуктивность утечки Lls (H), и d-ось и q-ось, намагничивающая индуктивность Lmd (H) и Lmq (H) и индуктивность Canay. Если значение индуктивности Canay в не известный, необходимо ввести 0 или оставить его незаполненный. Значением по умолчанию является [ 2.85E-03 0.114 1.19 0.36 ].
Полевое сопротивление Rf (Ω) и индуктивность утечки Llfd (H), оба упомянули статор. Значением по умолчанию является [ 5.79E-04 0.114].
Сопротивление d-оси Rkd (Ω) и индуктивность утечки Llkd (H), сопротивление q-оси Rkq1 (Ω) и индуктивность утечки Llkq1 (H), и (только если круглый ротор) сопротивление q-оси Rkq2 (Ω) и индуктивность утечки Llkq2 (H). Все эти значения отнесены в статор. Значением по умолчанию является [ 1.17E-02 0.182 1.97E-02 0.384 ].
Постоянный H инерции, который является отношением энергии, сохраненной в роторе на номинальной скорости по номинальной степени машины, фактор трения F (pu torque/pu скорость), и количество пар полюса p. Tf крутящего момента трения пропорционален скорости ротора ω (Tf=F.ω, где все количества выражаются в pu). Значением по умолчанию является [ 3.7 0 20].
Начальное отклонение скорости Δω (% номинальной скорости), электрический угол ротора Θe (степени), строка текущие значения ia, ib, ic (pu) и углы фазы pha, phb, phc (степени) и начальное полевое напряжение Vf (pu). Можно вычислить эти значения автоматически при помощи инструмента Load Flow или инструмента Machine Initialization блока powergui. Значением по умолчанию является [ 0 0 0 0 0 0 0 0 1 ].
Можно задать начальное полевое напряжение одним из двух способов. Если вы знаете, что номинальное текущее поле (первая строка, последний параметр), в диалоговом окне, входит, начальное полевое напряжение в DC вольт упомянуло ротор. В противном случае введите нуль как номинальное текущее поле, и укажите, что начальное полевое напряжение в DC вольт упомянуло статор. Можно определить номинальное полевое напряжение, просматриваемое от статора путем установки флажка Display Vfd which produces a nominal Vt на вкладке Advanced. Для насыщения, номинальное поле текущая и номинальная строка к линейному напряжению RMS основные значения для поля текущее и терминальное напряжение, соответственно.
Задает, должно ли магнитное насыщение ротора и железа статора быть моделировано или нет. Значение по умолчанию очищено.
Параметры кривой насыщения без загрузок. Магнитное насыщение статора и железа ротора моделируется кусочными точками определения линейного соотношения на кривой насыщения без загрузок. Первая строка этой матрицы содержит значения полевых токов (в pu). Вторая строка содержит значения соответствующих терминальных напряжений (в pu). Первая точка (первый столбец матрицы) должна отличаться от [0,0]. Эта точка соответствует точке, где эффект насыщения начинается. Значением по умолчанию является [0.6404,0.7127,0.8441,0.9214,0.9956,1.082,1.19,1.316,1.457;0.7,0.7698,0.8872,0.9466,0.9969,1.046,1.1,1.151,1.201].
Необходимо установить флажок Simulate saturation, чтобы моделировать насыщение. Установка этого флажка позволяет вам вводить матрицу параметров для симуляции насыщения. Если вы не хотите моделировать насыщение в своей симуляции, не устанавливайте флажок Simulate saturation. В этом случае отношение между ifd и полученным Vt линейно (никакое насыщение). Для насыщения, номинальное поле текущая и номинальная строка к линейному напряжению RMS основные значения для поля текущее и терминальное напряжение, соответственно.
Нажмите Plot, чтобы просмотреть кривую насыщения без загрузок.
Общая трехфазная полная мощность (ВА), строка к линейному напряжению RMS (pu), частота (Гц) и поле, текущее (pu).
Эта строка идентична первой строке основных параметров в диалоговом окне SI, за исключением того, что вы не задаете номинальное текущее поле. Это значение не требуется здесь, потому что нам не нужен коэффициент трансформации. Поскольку количества ротора просматриваются от статора, они преобразованы в pu использование базовых количеств статора, выведенных от предшествования трем номинальным параметрам. Значением по умолчанию является [6e+04 400 50].
D-ось синхронное реактивное сопротивление Xd, переходное реактивное сопротивление Xd' и подпереходное реактивное сопротивление Xd'', q-ось синхронное реактивное сопротивление Xq, переходное реактивное сопротивление Xq' (только если круглый ротор) и подпереходное реактивное сопротивление Xq'', и наконец реактивное сопротивление утечки Xl (все в pu). Значением по умолчанию является [2.24 0.17 0.12 1.02 0.13 0.08].
Задайте временные константы, которые вы предоставляете для каждой оси: или разомкнутая цепь или короткая схема. Выбор are Short-circuit (значение по умолчанию) или Open-circuit.
D-ось и временные константы q-оси (все в s). Эти значения должны быть сопоставимы с выбором, сделанным на двух предыдущих строках: переходная разомкнутая цепь d-оси (Tdo') или короткая схема (Td') временная константа, подпереходная разомкнутая цепь d-оси (Tdo'') или короткая схема (Td'') временная константа, переходная разомкнутая цепь q-оси (Tqo') или короткая схема (Tq') временная константа (только если круглый ротор), подпереходная разомкнутая цепь q-оси (Tqo'') или короткая схема (Tq'') временная константа. Значением по умолчанию является [0.012 0.003 0.003].
RS сопротивления статора (pu). Значением по умолчанию является 0.037875.
Постоянный H инерции, который является отношением энергии, сохраненной в роторе на номинальной скорости по номинальной степени машины, фактор трения F (pu torque/pu скорость), и количество пар полюса p. Tf крутящего момента трения пропорционален скорости ротора ω (Tf=F.ω, где все количества выражаются в pu). Значением по умолчанию является [0.1028 0.02056 2].
Начальное отклонение скорости Δω (% номинальной скорости), электрический угол ротора Θe (степени), строка текущие значения ia, ib, ic (pu) и углы фазы pha, phb, phc (степени) и начальное полевое напряжение Vf (pu). Можно вычислить эти значения автоматически при помощи инструмента Load Flow или инструмента Machine Initialization блока powergui. Значением по умолчанию является [ 0 0 0 0 0 0 0 0 1 ] .
Можно задать начальное полевое напряжение одним из двух способов. Если вы знаете, что номинальное текущее поле (первая строка, последний параметр), в диалоговом окне, входит, начальное полевое напряжение в DC вольт упомянуло ротор. В противном случае введите нуль как номинальное текущее поле, и укажите, что начальное полевое напряжение в DC вольт упомянуло статор. Можно определить номинальное полевое напряжение, просматриваемое от статора путем установки флажка Display Vfd which produces a nominal Vt на вкладке Advanced. Для насыщения, номинальное поле текущая и номинальная строка к линейному напряжению RMS основные значения для поля текущее и терминальное напряжение, соответственно.
Задает, должно ли магнитное насыщение ротора и железа статора быть моделировано или нет. Значение по умолчанию выбрано.
Параметры кривой насыщения без загрузок. Магнитное насыщение статора и железа ротора моделируется кусочными точками определения линейного соотношения на кривой насыщения без загрузок. Первая строка этой матрицы содержит значения полевых токов (в pu). Вторая строка содержит значения соответствующих терминальных напряжений (в pu). Первая точка (первый столбец матрицы) должна отличаться от [0,0]. Эта точка соответствует точке, где эффект насыщения начинается. Значением по умолчанию является [0.6404,0.7127,0.8441,0.9214,0.9956,1.082,1.19,1.316,1.457;0.7,0.7698,0.8872,0.9466,0.9969,1.046,1.1,1.151,1.201].
Необходимо установить флажок Simulate saturation, чтобы моделировать насыщение. Установка этого флажка позволяет вам вводить матрицу параметров для симуляции насыщения. Если вы не хотите моделировать насыщение в своей симуляции, не устанавливайте флажок Simulate saturation. В этом случае отношение между ifd и полученным Vt линейно (никакое насыщение). Для насыщения, номинальное поле текущая и номинальная строка к линейному напряжению RMS основные значения для поля текущее и терминальное напряжение, соответственно.
Нажмите Plot, чтобы просмотреть кривую насыщения без загрузок.
Вкладка Advanced блока не видима, когда вы устанавливаете параметр Simulation type блока powergui к Continuous, или когда вы выбираете параметр Automatically handle discrete solver блока powergui. Вкладка видима, когда вы устанавливаете параметр Simulation type блока powergui к Discrete и когда параметр Automatically handle discrete solver блока powergui очищен.
Выберите, чтобы определить номинальное текущее поле и напряжение, просматриваемое от статора. Этот параметр видим только для блока Synchronous Machine SI Fundamental. Значение по умолчанию очищено.
Как пример, без насыщения, типичная кривая может отобразиться как в следующей фигуре. ifn составляет 1 087 А, и Vn является 13 800-вольтовым от строки к строке RMS, который является также 11 268-вольтовой пиковой строкой-к-нейтральному.
Насыщение моделируется как кусочная линейная кривая насыщения при помощи двух интерполяционных таблиц, реализующих изменения Lmd и индуктивности намагничивания Lmq.
Следующая фигура иллюстрирует хорошую подгонку графически (ромбы являются реальными точками, вводимыми в диалоговое окно).
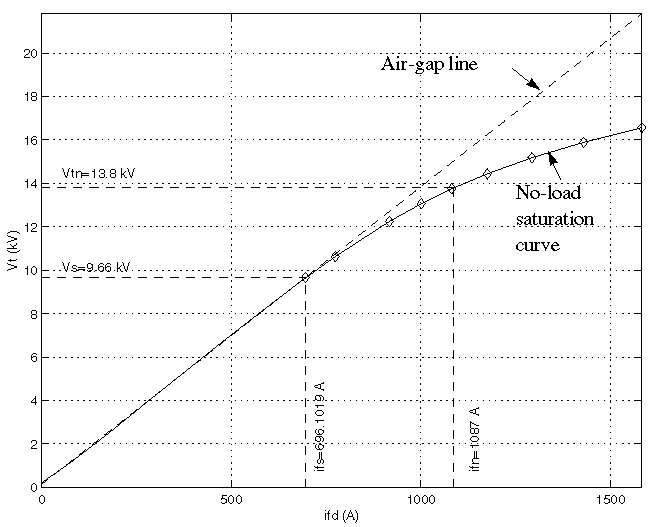
В данном случае следующие значения используются:
ifn | 1 087 А |
ifd | [695.64, 774.7, 917.5, 1001.6, 1082.2, 1175.9, 1293.6, 1430.2, 1583.7] A |
Vt | [9660, 10623, 12243, 13063, 13757, 14437, 15180, 15890, 16567] V |
Задает шаг расчета, используемый блоком. Чтобы наследовать шаг расчета, заданный в блоке powergui, установите этот параметр на −1 (значение по умолчанию).
Задает метод интегрирования, используемый блоком, когда параметр Solver type блока powergui устанавливается на Discrete. Выбором является Trapezoidal non iterative (значение по умолчанию), Trapezoidal iterative (alg. loop), Trapezoidal robust и Backward Euler robust.
Дискретная модель решателя автоматически установлена в Trapezoidal robust, когда вы выбираете параметр Automatically handle Discrete solver блока powergui.
Трапециевидные, не итеративные и Трапециевидные итеративный (alg. цикл) методы, больше не рекомендуются для дискретизации блока Asynchronous Machine. Первый метод требует, чтобы вы добавили ненезначительные загрузки шунта на терминалах машины, чтобы гарантировать устойчивость симуляции, и второй метод может не сходиться (остановки симуляции), когда количество машин увеличивается в модели.
Трапециевидные устойчивые и Обратные Эйлеровы устойчивые методы позволяют вам избавлять от необходимости использовать паразитные загрузки и позволять моделировать машину без загрузок. Устранить топологические ошибки машин, соединенных с индуктивной схемой (например, выключатель, соединенный последовательно с машиной); машина моделирует незначительную внутреннюю загрузку 0,01% номинальной степени.
Трапециевидный устойчивый метод немного более точен, чем Обратный Эйлеров устойчивый метод, особенно когда модель моделируется в больших шагах расчета. Трапециевидный устойчивый метод может произвести небольшие ослабленные числовые колебания на напряжении машины при условиях без загрузок, в то время как Обратный Эйлеров устойчивый метод предотвращает колебания и поддерживает хорошую точность.
Для получения дополнительной информации о какой метод использовать в вашем приложении, смотрите Симуляцию Дискретизированные Электрические системы.
Параметры потока загрузки используются, чтобы задать параметры блоков для использования с инструментом Load Flow блока powergui. Эти параметры потока загрузки используются для образцовой инициализации только. Они не оказывают влияния на модель блока и на производительность симуляции.
Настройка вкладки Load Flow зависит от опции, выбранной для параметра Generator type.
Задайте тип генератора машины.
Выберите swing, чтобы реализовать значение управления генератора и угол фазы ее терминального напряжения. Ссылочное значение напряжения и угол заданы Swing bus or PV bus voltage и параметрами Swing bus voltage angle блока Load Flow Bus, соединенного с терминалами машины.
Выберите PV (значение по умолчанию), чтобы реализовать генератор, управляющий его выводом активная степень P и значение напряжения V. P задан параметром Active power generation P блока. V задан параметром Swing bus or PV bus voltage блока Load Flow Bus, соединенного с терминалами машины. Можно управлять минимальной и максимальной реактивной энергией, произведенной блоком при помощи параметров Maximum reactive power Qmax и Minimum reactive power Qmin.
Выберите PQ, чтобы реализовать генератор, управляющий его выводом активная степень P и реактивная мощность Q. P и Q заданы Active power generation P и параметрами Reactive power generation Q блока, соответственно.
Задайте активную степень, которую вы хотите сгенерированный машиной в ваттах. Когда машина действует в моторном режиме, вы задаете отрицательную величину. Этот параметр доступен, если вы задаете Generator type как PV или PQ. Значением по умолчанию является 0.
Задайте реактивную мощность, которую вы хотите сгенерированный машиной в Варе. Отрицательная величина указывает, что реактивная мощность поглощена машиной. Этот параметр доступен, только если вы задаете Generator type как PQ. Значением по умолчанию является 0.
Этот параметр доступен, только если вы задаете Generator type как PV. Указывает на минимальную реактивную энергию, которая может быть произведена машиной при хранении терминального напряжения в его ссылочном значении. Это ссылочное напряжение задано параметром Swing bus or PV bus voltage блока Load Flow Bus, соединенного с терминалами машины. Значением по умолчанию является -inf, что означает, что нет никакого нижнего предела на реактивной мощности вывода. Значением по умолчанию является -inf.
Этот параметр доступен, только если вы задаете Generator type как PV. Указывает на максимальную реактивную энергию, которая может быть произведена машиной при хранении терминального напряжения в его ссылочном значении. Это ссылочное напряжение задано параметром Swing bus or PV bus voltage блока Load Flow Bus, соединенного с терминалами машины. Значением по умолчанию является inf, что означает, что нет никакого верхнего предела реактивной мощности вывода. Значением по умолчанию является inf.
Модули вводов и выводов отличаются, согласно которому диалоговому окну вы используете, чтобы ввести параметры блоков. Если вы принимаете решение задать основные параметры в единицах СИ, соответствующие вводы и выводы находятся в единицах СИ. dw в векторе внутренних переменных находится в pu и углу, Θ находится в раде. Другие вводы и выводы находятся в pu.
PmПервый вход Simulink является механической энергией в вале машины в W или pu. В генерации режима этот вход может быть положительной константой или функционировать или вывод блока движущей силы (см. Гидравлические блоки Турбины и Регулятора Регулятора или Турбины и Пара). В автомобильном режиме этот вход обычно является отрицательной константой или функцией.
wАльтернативный вход блока вместо Pm (в зависимости от значения параметра Mechanical input) является скоростью машины в rad/s.
VfВторой вход Simulink блока является полевым напряжением. Это напряжение может быть предоставлено регулятором напряжения в режиме генератора (см. блок Excitation System). Это обычно - константа в моторном режиме.
Если вы используете модель в основных единицах SI, полевое напряжение, Vf должен быть введен в DC вольт, если номинальное поле текущий Ifn задан, или в вольтах, упомянуло статор, если Ifn не задан. Чтобы получить Vfd, производящий номинальное напряжение, установите флажок Display nominal field current and voltage producing 1 pu stator voltage во вкладке Advanced. Если вы используете модель в pu Стандарте или в pu Основных единицах, Vf должен быть введен в pu (1 pu полевого напряжения, производящего 1 pu терминального напряжения ни при какой загрузке).
mSimulink вывод блока является вектором, содержащим сигналы измерения. Можно демультиплексировать эти сигналы при помощи блока Селектора Шины, обеспеченного в Библиотеке Simulink. В зависимости от типа маски, которую вы используете, модули находятся в SI или в pu.
Имя | Определение | Модули |
|---|---|---|
МСФО | Статор текущий is_a | A или pu |
ibs | Статор текущий is_b | A или pu |
ics | Статор текущий is_c | A или pu |
IQ | Статор текущий IQ | A или pu |
ID | Статор текущий ID | A или pu |
IFD | Поле текущая IFD | A или pu |
ikq1 | Демпфер, проветривающий текущий ikq1 | A или pu |
Ikq2 | Демпфер, проветривающий текущий ikq2 | A или pu |
ikd | Демпфер, проветривающий текущий ikd | A или pu |
phimq | Взаимный поток phimq | V.s или pu |
phimd | Взаимный поток phimd | V.s или pu |
vq | Напряжение статора vq | V или pu |
vd | Напряжение статора vd | V или pu |
lmq | Lmq насыщал индуктивность | H или pu |
lmd | Lmd насыщал индуктивность | H или pu |
dtheta | Угловое отклонение ротора d_theta | рад |
w | Скорость ротора wm | rad/s или pu |
Pe | Электроэнергия Pe | W или pu |
собственный вес | Собственный вес отклонения скорости ротора | pu |
тета | Угловая тета механического устройства ротора | градус |
Te | Электромагнитный крутящий момент Те | N.m или pu |
\delta | Загрузите угловую дельту | градус |
Pe0 | Выведите активную степень Peo | W или pu |
Qe0 | Выведите реактивную мощность Qeo | VAR или pu |
Угловое отклонение угловой теты ротора представляет электрический угол, дающий мгновенное положение ротора относительно общей ссылки, вращающейся на синхронной скорости. Этот угол полезен в исследованиях устойчивости, чтобы измерить относительные положения роторов различных машин в сети. Положения роторов затем измеряются относительно положения теты данной машины, выбранной в качестве ссылки.
В Дискретных системах, когда вы используете Синхронные блоки Машины, дискретизированные с трапециевидным неитеративным решателем, вам придется использовать маленькую паразитную активную нагрузку, соединенную на терминалах машины, чтобы избежать числовых колебаний. Времена большой выборки требуют больших загрузок. Минимальная активная нагрузка пропорциональна шагу расчета. Как показывает опыт, помните, что с 25 μs временными шагами в системе на 60 Гц, минимальная нагрузка составляет приблизительно 2,5 процента степени номинала машины. Например, 200 синхронных машин MVA в энергосистеме, дискретизированной с 50 μs шагами расчета, требуют приблизительно 5 процентов активной нагрузки или 10 МВт. Если шаг расчета уменьшается до 20 μs, активная нагрузка 4 МВт должна быть достаточной.
Однако, если вы дискретизируете блок Synchronous Machine с помощью трапециевидного итеративного (alg. цикл) решатель, можно использовать незначительную паразитную загрузку (ниже 0,1% номинальной степени) при сохранении числовой устойчивости. Эта итеративная модель, производящая алгебраический цикл, приводит к более медленной скорости симуляции.
Пример power_SM_Fundamental показывает использование блока Synchronous Machine SI Fundamental и Синхронной Машины pu блок Fundamental, чтобы смоделировать 555 MVA, 24 кВ, 60 Гц, синхронный генератор на 3 600 об/мин. Это показывает, как задать SI и pu параметры. Это также объясняет, как вычислить поле и ротор демпфера извилистые параметры, которые отнесены в статор. В дополнение к обмотке возбуждения круглый ротор этой машины имеет три обмотки демпфера: один демпфер на прямой оси и два демпфера на квадратурной оси.
Три схемы моделируют ту же синхронную машину:
Схема 1: Основные параметры заданы в SI. Номинальное текущее поле задано (ifn = 1 300 А).
Схема 2: Основные параметры заданы в SI. Номинальное текущее поле не задано (ifn = 0).
Схема 3: Основные параметры заданы в pu.
Параметры машины взяты из примера в Kundur [5].
Посмотрите на раздел коллбэка Model Properties/PreLoad Fcn модели, чтобы видеть спецификации машины и вычисление статора и полевых основ, параметры ротора RL упомянули статор, коэффициент трансформации и номинальное полевое напряжение и текущий.
Машины первоначально действуют в устойчивом состоянии при фактически никакой загрузке (загрузка = 0. 1% номинальной степени) с постоянным полевым напряжением и механической энергией. От фазы к фазе отказ с 6 циклами применяется в t = 0,1 секунды. Осциллограф показывает сравнение между напряжением AB от строки к строке, поэтапно осуществите текущий статор, и поле, текущее из этих трех машин.
Чтобы моделировать дискретную модель, выберите тип симуляции Discrete в блоке powergui. Модель дискретизируется с шагом расчета Ts = 50 μs. Получить стабильную модель с такой маленькой загрузкой (0. 1% номинальной степени), выберите Trapezoidal iterative (alg. Loop) дискретный решатель во вкладке Advanced каждого блока Synchronous Machine.
Пример power_syncmachine иллюстрирует использование блока Synchronous Machine в моторном режиме. Моделируемая система состоит из промышленного класса синхронный двигатель (150 л. с. (112 кВА), 762 В) соединенный с сетью с 10 уровнями короткой схемы MVA. Машина инициализируется для выходной электроэнергии −50 kW (отрицательная величина для моторного режима), соответствуя механической энергии −48.9 kW. Соответствующие значения механической энергии и полевого напряжения заданы блоком Step премьер-министра и в блоке Vf Constant. Блок The Pm Step применяет внезапное увеличение механической энергии от −48.9 kW к −60 kW во время t = 0,1 с.
Запустите симуляцию.
После того, как загрузка увеличилась с 48,9 кВт до 60 кВт в t = 0,1 с, скорость машины колеблется прежде, чем стабилизироваться к 1 800 об/мин. Угол загрузки (угол между терминальным напряжением и внутренним напряжением) увеличивается от −21 степеней до −53 степеней.
[1] И.М. Кэней. "Причины Несоответствий на Вычислении Количеств Ротора и Точных Эквивалентных Схемах Синхронной Машины". IEEE®Transactions на Аппарате Степени и Системах. PAS-88, № 7 (1969): 1114–1120.
[2] Moeini, A., и др. “Синхронная модель Machine Stability, Обновление Станд. IEEE 1110-2002 Метода Перевода Данных”. Заседания стандартов IEEE. 2 018 IEEE PES.
[3] Руководство IEEE для синхронных методов моделирования генератора и приложения в исследованиях устойчивости энергосистемы. Станд. IEEE 1110-2002 (Версия станд. IEEE 1110-1991 [2003]): 1–72.
[4] Краузе, P.C. Анализ электрического машинного оборудования. Разделите 12.5. Нью-Йорк: McGraw-Hill, 1986.
[5] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, McGraw-Hill, 1994.
Система возбуждения, Гидравлическая Турбина и Регулятор, powergui, Упрощенная Синхронная Машина, Паровая Турбина и Регулятор
