Гибридное возбуждение синхронная машина с трехфазным статором раны Уая
Simscape / Электрический / Электромеханический / Постоянный магнит

Блок Hybrid Excitation PMSM представляет гибридное возбуждение синхронная машина с трехфазным статором раны Уая. Постоянные магниты и обмотки возбуждения обеспечивают возбуждение машины. Данные показывают эквивалентную электрическую схему для обмоток ротора и статора.
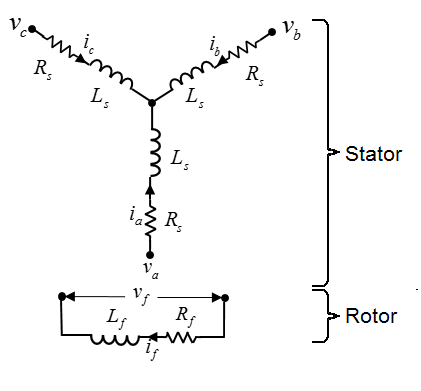
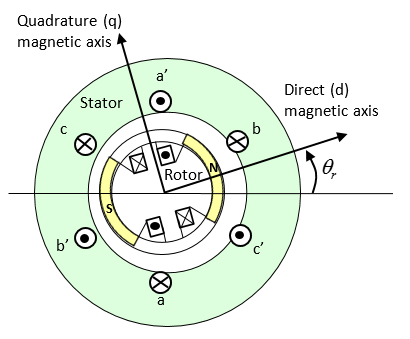
Схема показывает моторную конструкцию с однополюсно-парным на роторе. Для соглашения осей, когда угол механического устройства ротора θr является нулем, a - выравниваются фаза и потоки постоянного магнита. Блок поддерживает второе определение оси ротора, для которого угол механического устройства ротора задан как угол между a - фазой магнитная ось и ротором q - ось.
Напряжения через обмотки статора заданы
где:
va, vb и vc являются отдельными напряжениями фазы через обмотки статора.
Rs является эквивалентным сопротивлением каждой обмотки статора.
ia, ib и ic являются токами, текущими в обмотках статора.
и скорости изменения магнитного потока в каждой обмотке статора.
Напряжение через обмотку возбуждения выражается как
где:
vf является отдельным напряжением фазы через обмотку возбуждения.
Rf является эквивалентным сопротивлением обмотки возбуждения.
if является текущим течением в обмотке возбуждения.
скорость изменения магнитного потока в обмотке возбуждения.
Постоянный магнит, обмотка возбуждения и обмотки статора трехзвездочной раны способствуют потоку, соединяющему каждую обмотку. Общий поток задан
где:
ψa, ψb и ψc являются общими потоками, соединяющими каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba, Lbc, Lca и Lcb являются взаимной индуктивностью обмоток статора.
ψam, ψbm и ψcm являются потоками намагничивания, соединяющими обмотки статора.
Lamf, Lbmf и Lcmf являются взаимной индуктивностью обмотки возбуждения.
Индуктивность в обмотках статора является функциями ротора электрический угол и задана
где:
N является количеством пар полюса ротора.
θr является углом механического устройства ротора.
θe является ротором электрический угол.
Ls является самоиндукцией статора на фазу. Это значение является средней самоиндукцией каждой из обмоток статора.
Lm является колебанием индуктивности статора. Это значение является амплитудой колебания самоиндукции и взаимной индуктивности с изменяющимся углом ротора.
Ms является статором взаимная индуктивность. Это значение является средней взаимной индуктивностью между обмотками статора.
Обмотка соединения потока намагничивания, a-a’ является максимумом когда θr = 0 ° и нуль когда θr = 90 °. Поэтому:
и
где:
ψm является соединенным моторным потоком.
Lmf является взаимной полевой индуктивностью арматуры.
ψf является потоком, соединяющим обмотку возбуждения.
Lf является индуктивностью обмотки возбуждения.
преобразование вектора Lmf, то есть,
Применение преобразования Парка к блоку, электрические уравнения определения производят выражение для крутящего момента, который независим от угла ротора.
Преобразование Парка задано
Применение преобразования Парка к первым двум электрическим уравнениям определения производит уравнения, которые задают поведение блока:
и
где:
vd, vq и v0 является d - ось, q - ось и напряжения нулевой последовательности. Эти напряжения заданы
id, iq и i0 является d - ось, q - ось и токи нулевой последовательности, заданные
Ld является статором d - индуктивность оси. Ld = Ls + Ms + 3/2 Lm.
ω является механической скоростью вращения.
Lq является статором q - индуктивность оси. Lq = Ls + Ms − 3/2 Lm.
L0 является индуктивностью нулевой последовательности статора. L0 = Ls – 2Ms.
T является крутящим моментом ротора. Для блока Hybrid Excitation PMSM крутящий момент вытекает из случая машины (порт C сохранения блока) к ротору машины (порт R сохранения блока).
J является инерцией ротора.
TL является крутящим моментом загрузки.
Bm является затуханием ротора.
Блок принимает, что распределение потока является синусоидальным.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Основных переменных (Simscape).
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Mbayed, R. Анализ неработающих энергосистем. Хобокен, NJ: нажатие Wiley-IEEE, 1995.
[3] Андерсон, пополудни Вклад в Управление Гибридного Возбуждения Синхронная Машина для Встраиваемых приложений. Universite de Cergy Pontoise, 2012.
[4] Ло, X. и Т. А. Липо. “Синхронная Гибридная Машина AC / Постоянный магнит Гибридная Машина AC”. Транзакции IEEE энергетического Преобразования. Издание 15, № 2 (2000), стр 203–210.
BLDC | PMSM | Коммутируемая машина нежелания | Синхронная полевая схема машины | Синхронное измерение машины | Синхронная машина нежелания


