Сгенерируйте ширину импульса модулируемый сигнал или форма волны
Simscape / Электрический / Управление / Модуляция Ширины импульса
Блок PWM Generator реализует генератор PWM. Метод модуляции ширины импульса управляет передачей степени от одной электрической детали до другого путем быстрого переключения между передачей полной мощности и никакой передачей степени.
Генератор PWM блокирует выходные параметры или 1, когда рабочий цикл больше, чем значение счетчика поставщика услуг или 0 в противном случае. Можно установить период каждого цикла путем определения периода таймера Tper. Можно изменить начальный вывод или фазу, PWM вывод путем определения одного из трех типов счетчиков поставщика услуг:
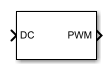
Суммирующий счетчик — выходной сигнал PWM инициализирует в начале цикла on. Эта диаграмма показы поставщик услуг противостоит сигналу и соответствующему PWM вывод.
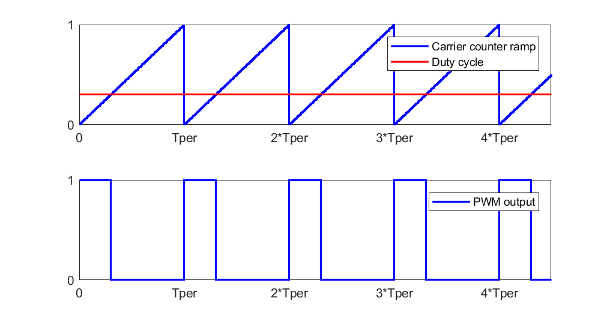
Обратный счетчик — выходной сигнал PWM инициализирует в начале цикла off. Эта диаграмма показы поставщик услуг противостоит сигналу и соответствующему PWM вывод.
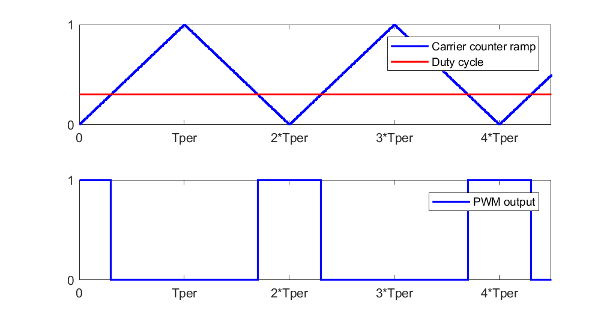
Реверсивный счетчик — выходной сигнал PWM инициализирует на полпути через цикл on. Эта диаграмма показы поставщик услуг противостоит сигналу и соответствующему PWM вывод.