Сгенерируйте модулируемую форму волны трехфазной, двухуровневой ширины импульса
Simscape / Электрический / Управление / Модуляция Ширины импульса
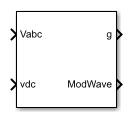
Генератор PWM (Трехфазный, Двухуровневый) блокирует средства управления, переключающие поведение для трехфазного, двухуровневого конвертера степени. Блок:
Вычисляет на - и времена вне пропускания на основе входных параметров блока:
Три синусоидальных ссылочных напряжения, один на фазу
Напряжение ссылки DC
Использует времена пропускания, чтобы сгенерировать шесть управляющих переключателем импульсов.
Использует времена пропускания, чтобы сгенерировать формы волны модуляции.
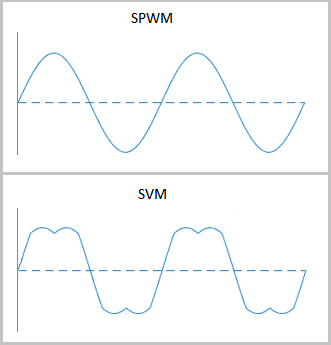
Блок обеспечивает режимы и для непрерывной и для прерывистой модуляции ширины импульса (PWM). Данные показывают общее различие между непрерывным синусоидальным PWM (SPWM) и непрерывными формами волны модуляции вектора пробела (SVM).
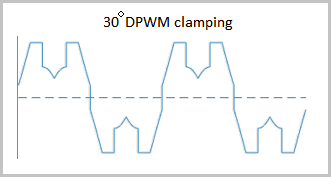
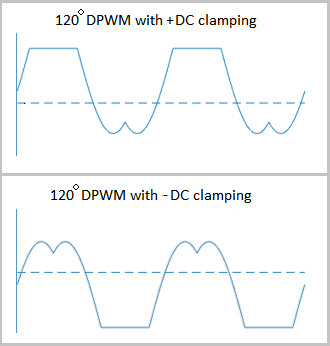
Для прерывистого PWM (DPWM), блок фиксирует волну модуляции к положительной или отрицательной направляющей DC для в общей сложности 120 градусов в каждый основной период. Во время зажимных интервалов прекращается модуляция.
Форма волны с DPWM с 30 степенями имеет четыре интервала с 30 степенями на основной период.
Выбор положительного или отрицательного сдвига фазы с 30 степенями влияет на зажимные интервалы для DPWM с 60 степенями.
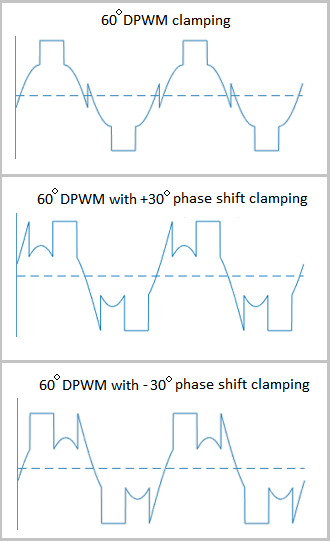
Данные показывают формы волны для положительной и отрицательной фиксации DC для DPWM с 120 степенями.
Этот блок позволяет вам выбирать естественную, симметричную, или асимметричную выборку волны модуляции.
Генератор PWM (Трехфазный, Двухуровневый) блок не выполняет основанный на поставщике услуг PWM. Вместо этого блок использует входные сигналы, чтобы вычислить времена пропускания и затем использует времена пропускания, чтобы сгенерировать и управляющие переключателем импульсы и формы волны модуляции, которые он выводит.
Основанный на поставщике услуг PWM, однако, полезен для показа, как режим выборки, который вы выбираете, относится к переключателю - на, и выключите поведение импульсов, которые генерирует блок. Генератор, который использует двухуровневый, основанный на поставщике услуг метод PWM:
Выбирает ссылочную волну.
Сравнивает выборку с треугольной несущей.
Генерирует переключатель - на импульсе, если выборка выше, чем сигнал поставщика услуг или выключать импульс, если выборка ниже, чем несущая.
Чтобы определить переключатель - на и выключить импульсное поведение, двухуровневый основанный на поставщике услуг генератор PWM использует эти методы, чтобы выбрать треугольную волну:
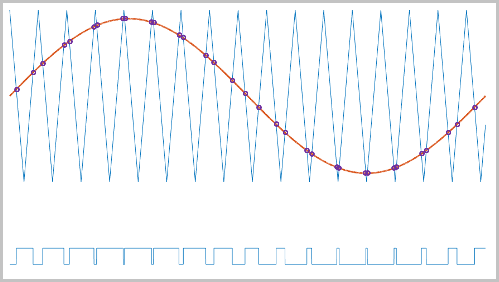
Естественный — выборка и сравнение происходят в точках пересечения волны модуляции и несущей.
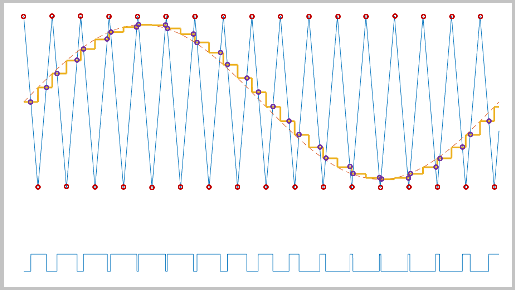
Асимметричный — Выборка происходит на верхних и нижних границах несущей. Сравнение происходит на пересечении, которое следует за выборкой.
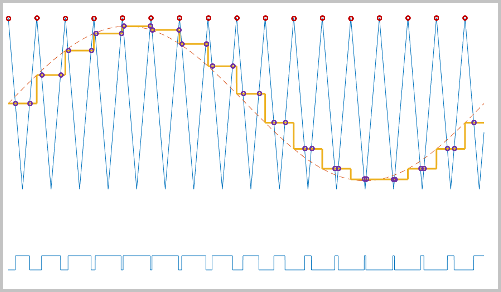
Симметричный — Выборка происходит только на верхнем контуре несущей. Сравнение происходит на пересечении, которое следует за выборкой.
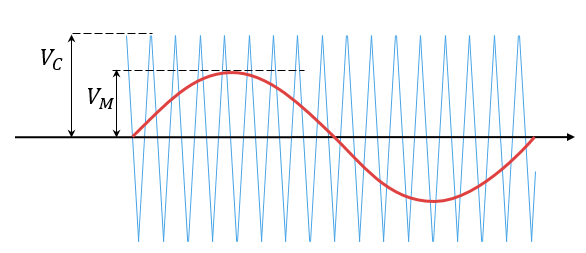
Индекс модуляции, который измеряет способность конвертера степени вывести данное напряжение, задан как
где
m является индексом модуляции.
Vm является пиковым значением волны модуляции.
Vc является пиковым значением треугольной несущей.
Для трехфазного SPWM,
где
Vpeak является пиковым значением основного компонента напряжения фазы-к-нейтральному.
vdc является напряжением ссылки DC.
Для трехфазного вектора пробела PWM (SVM) и DPWM,
Для нормальной установившейся операции, 0 <m ≤ 1. Если переходный процесс, такой как увеличение загрузки, заставляет амплитуду Vm превышать амплитуду Vc, перемодуляция (m> 1) происходит.
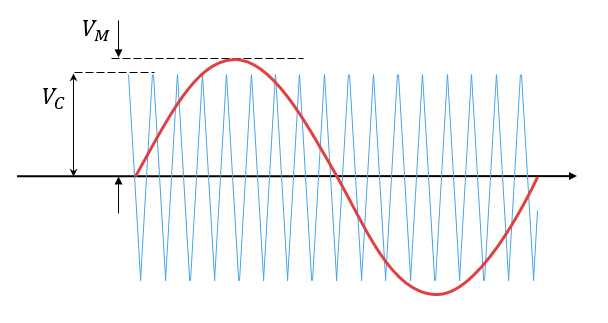
Если перемодуляция происходит, выходное напряжение зажимов конвертера степени к положительной или отрицательной направляющей DC.
В Трехфазном Двухуровневом примере Генератора PWM подсистема Two-Level Controller содержит 400-вольтовый вход ссылки DC, и индекс модуляции, m, 0,8. Для SPWM максимальное входное напряжение составляет 400 В / 2, то есть, 200 В. Чтобы продемонстрировать перемодуляцию, переходный процесс добавляется в начале симуляции. Переходный процесс обеспечивает амплитуды ссылочных напряжений, чтобы превысить амплитуду 1/2 напряжения ссылки DC. Чтобы подсветить перемодуляцию, осциллограф включает результаты симуляции для только одного из шести выходных импульсов и только a - фаза ссылочных напряжений, форм волны модуляции и выходных напряжений.
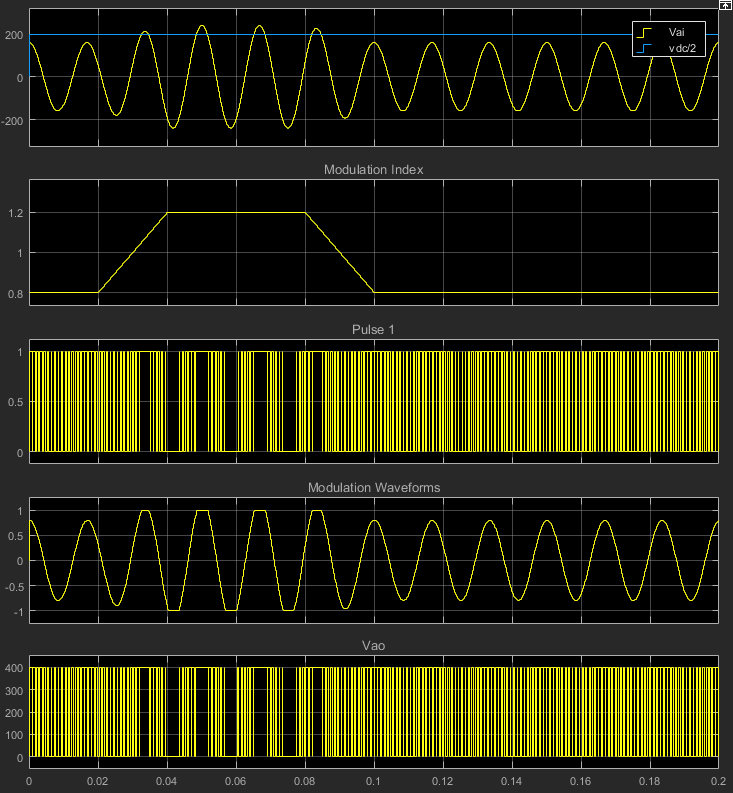
Индекс модуляции больше, чем один между 0.03–0.09 секундами. Во время перемодуляции:
Импульс остается в на или от положения.
Выходное напряжение, Vao, фиксирует к положительной или отрицательной направляющей DC.
[1] Чанг, D. W. Дж. С. Ким и С. К. Сул. “Объединенный Метод Модуляции Напряжения для Оперативного Преобразования Трехфазного питания”. Транзакции IEEE на Промышленных Приложениях, Издании 34, № 2, 1998, стр 374–380.
[2] Hava, утра, Р. Дж. Керкмен и Т. А. Липо. “Простые Аналитические и Графические Методы для Основанных на поставщике услуг Дисков PWM-VSI”. Транзакции IEEE на Силовой электронике, Издании 14, № 1, 1999, стр 49–61.

















