Бесщеточная модель электродвигателя с управлением крутящим моментом с обратной связью
Simscape / Электрический / Электромеханический / Постоянный магнит
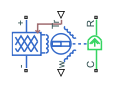
Блок Simplified PMSM Drive представляет бесщеточную модель электродвигателя с управлением крутящим моментом с обратной связью. Этот блок абстрагирует поведение скорости крутящего момента объединенного моторного и моторного драйвера в порядке поддержать симуляцию уровня системы, где скорость симуляции важна.
Блок разрешает только область значений крутящих моментов и скоростей, которые задает конверт скорости крутящего момента. В настройке блока по умолчанию вы задаете эти данные в диалоговом окне блока как набор точек данных скорости и соответствующих максимальных значений крутящего момента. Следующие данные показывают типичный конверт скорости крутящего момента для сервопривода.
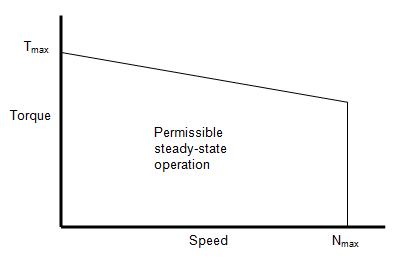
Задайте конверт скорости крутящего момента для положительной области крутящего момента только, то есть, квадранты 1 и 4. Если вы задаете только для положительных скоростей (квадрант 1 или, эквивалентно, автомобильная область), то квадрант 4 конверта крутящего момента задан блоком как зеркальное отображение квадранта 1. Конверт скорости крутящего момента сервопривода имеет тот же профиль, когда двигатель действует в обратном направлении (квадранты 2 и 3).
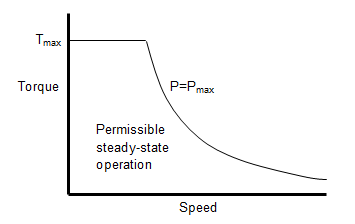
Вместо того, чтобы обеспечить сведенные в таблицу данные скорости крутящего момента, можно задать максимальный крутящий момент и максимальную мощность. Это приводит к профилю конверта скорости крутящего момента, показанному ниже. Другие три операционных квадранта ограничиваются этим тем же профилем.
Блок производит положительный крутящий момент, действующий из механического устройства C к портам R.
Блок позволяет и упрощенное и сведенное в таблицу определение электрических потерь. Значение по умолчанию, упрощенное, поведение должно смоделировать потери как сумму следующих четырех условий:
Серийное сопротивление между предоставлением мощности постоянного тока и электроприводом.
Постоянные составляющие потерь, независимые от крутящего момента и скорости, P0. Используйте это, чтобы составлять фиксированные потери конвертера.
Зависимая крутящим моментом электрическая потеря k τ2, где τ является крутящим моментом и k, является константой. Это представляет омические потери в медных обмотках.
Зависимая скоростью электрическая потеря kw ω2, где ω является скоростью и kw, является константой. Это представляет железные потери, подлежащие выплате вертеться в водовороте токи.
Также можно обеспечить сведенные в таблицу значения потерь как функцию частоты вращения двигателя и загрузить крутящий момент. При использовании этой опции обеспечьте данные для всех операционных квадрантов, в которых запустится ваша симуляция. Если вы обеспечиваете частичные данные (например, только для квадранта 1 прямая автомобильная область), то другие квадранты приняты, чтобы повторить тот же шаблон потерь. Это обычно будет правильно для противоположной автомобильной области, но может быть приближением для тормозящих/генерирующих квадрантов. Блок не делает никакой экстраполяции значений потерь для скорости и закручивает значения, которые превышают область значений таблицы.
Наконец, можно задать электрические потери при помощи сведенных в таблицу данных об эффективности вместо одного измерения эффективности или сведенных в таблицу данных потерь. При использовании этой опции также обеспечьте данные для всех операционных квадрантов, в которых запустится ваша симуляция. Если вы обеспечиваете частичные данные (например, только для квадранта 1 прямая автомобильная область), то другие квадранты приняты, чтобы повторить тот же шаблон потерь.
Лучшая практика состоит в том, чтобы обеспечить сведенные в таблицу данные потерь как функцию скорости и крутящего момента, а не сведенных в таблицу данных об эффективности, потому что:
Эффективность становится неточно указанной для нулевой скорости или нулевого крутящего момента.
Используя потери, можно также объяснить постоянные составляющие потерь, которые все еще присутствуют для нулевой скорости или крутящего момента.
Если вы используете сведенную в таблицу опцию эффективности:
Блок преобразовывает значения эффективности, которые вы обеспечиваете в потери, и использует сведенные в таблицу потери для симуляции.
Значения эффективности вы предусматриваете нулевую скорость или обнуляете крутящий момент, проигнорированы, и потери приняты нуль, когда или крутящий момент или скорость являются нулем.
Блок использует линейную интерполяцию, чтобы определить потери. Обеспечьте сведенные в таблицу данные для низких скоростей и низких крутящих моментов, как требуется, чтобы получить желаемый уровень точности для более низких условий степени.
Блок не делает никакой экстраполяции значений потерь для скорости и закручивает значения, которые превышают область значений таблицы.
Когда вы обеспечиваете сведенные в таблицу данные о потере или эффективности, можно также задать его как функцию скорости, загрузить крутящий момент и напряжение предоставления DC. Эта опция полезна, когда напряжение предоставления не отрегулировано и может отличаться во время симуляции. Одним примером является ходовая часть электромобиля, которая не имеет регулятора DC-DC в восходящем направлении электропривода. Используйте блок Simplified PMSM Drive, чтобы смоделировать электропривод и обеспечить сведенные в таблицу значения потери или эффективности как функцию частоты вращения двигателя, крутящего момента загрузки и напряжения предоставления DC.
Блок обеспечивает четыре варианта моделирования, доступные путем щелчка правой кнопкой по блоку по блок-схеме и затем выбора подходящего варианта из контекстного меню, под Simscape> Block choices:
No thermal port — Базовая модель, которая не моделирует отказы или термальные эффекты. Это значение по умолчанию.
Show thermal port — Модель с представленным тепловым портом. Эта модель не моделирует отказы.
Faultable| No thermal port — Модель с представленным портом управления отказа. Эта модель не моделирует термальные эффекты.
Faultable | Show thermal port — Модель, которая позволяет вам моделировать и отказы и термальные эффекты. И тепловой порт и входной порт отказа представлены.
Блок имеет дополнительный тепловой порт, скрытый по умолчанию. Чтобы представить тепловой порт, выберите один из вариантов блока что образцовые термальные эффекты, как описано в Вариантах Блока. Это действие отображает тепловой порт H на значке блока и представляет параметры Thermal Port и Temperature Dependence. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловой порт, чтобы моделировать эффекты медных потерь сопротивления, которые преобразовывают электроэнергию нагреться. Для получения дополнительной информации об использовании тепловых портов в блоках привода смотрите Термальные эффекты Симуляции во Вращательных и Переводных Приводах.
Можно использовать входной порт физического сигнала F, чтобы моделировать отказ сервопривода, а также соединение и разъединение предоставления DC. Вы не можете моделировать разъединение предоставления DC путем простого открытия переключателя, потому что должно быть конечное напряжение на терминалах сервопривода, произведя ток, который балансирует электроэнергию и механическую энергию.
Чтобы представить порт управления отказа, выберите один из faultable вариантов блока, как описано в Вариантах Блока. Это действие отображает входной порт физического сигнала F на значке блока и добавляет вкладку Faults в диалоговое окно блока. Это переходит, описан далее на этой странице с описанием.
Если сигнал соединяется с портом F, то блок работает согласно установкам параметров с вкладкой Faults. Например, если Fault condition является Faulted if F >= Fault threshold, то, когда сигнал в порте F повышается выше значения Fault threshold, сервопривод прекращает действовать, нулевой ток взят из стороны предоставления, и нулевой ток предоставляется стороне загрузки.
Моторный драйвер отслеживает спрос на крутящий момент с временной константой Tc.
Колебания частоты вращения двигателя из-за механической загрузки не влияют на моторное отслеживание крутящего момента.
Положительное электрическое предоставление DC
Отрицательное электрическое предоставление DC
Ссылочный спрос на крутящий момент
Механическая скорость выводится
Механический вращательный порт сохранения
Механический вращательный порт сохранения
Выберите один из следующих методов для параметризации блока:
Tabulated torque-speed envelope — Обеспечьте векторы скоростей вращения и соответствующих максимальных значений крутящего момента. Это - опция по умолчанию.
Maximum torque and power — Задайте конверт скорости крутящего момента путем обеспечения значений для максимального допустимого крутящего момента и моторной степени.
Скорости вращения для допустимой установившейся операции. Этот параметр видим, только если вы выбираете Tabulated torque-speed envelope для параметра Parameterize by. Значением по умолчанию является [0 3.75e+03 7.5e+03 8e+03]
rpm. Чтобы избежать низкой производительности из-за бесконечного наклона в кривой скорости крутящего момента, задайте вектор скоростей вращения, который не содержит дублирующиеся последовательные значения.
Максимальные значения крутящего момента для допустимой установившейся операции. Этот параметр видим, только если вы выбираете Tabulated torque-speed envelope для параметра Parameterize by. Эти значения соответствуют скоростям в параметре Vector of rotational speeds и задают конверт скорости крутящего момента для двигателя. Значением по умолчанию является [0.09 0.08 0.07 0]
Nm.
Максимальный допустимый моторный крутящий момент. Этот параметр видим, только если вы выбираете Maximum torque and power для параметра Parameterize by. Значением по умолчанию является 0.1
Nm.
Максимальная допустимая моторная степень. Этот параметр видим, только если вы выбираете Maximum torque and power для параметра Parameterize by. Значением по умолчанию является 30
W.
Временная константа, с которой моторный драйвер отслеживает спрос на крутящий момент. Значением по умолчанию является 0.02
s.
Выберите один из следующих методов для электрической параметризации потерь:
Single efficiency measurement — Смоделируйте потери как сумму четырех условий, перечисленных в описании блока, в одной точке измерения. Это - опция по умолчанию.
Tabulated loss data as a function of speed and torque — Определите ущербы от двумерного поиска по таблице на основе обеспеченных сведенных в таблицу данных для частот вращения двигателя, загрузите крутящие моменты и соответствующие потери.
Tabulated efficiency data as a function of speed and torque — Определите ущербы от двумерного поиска по таблице на основе обеспеченных сведенных в таблицу данных для частот вращения двигателя, загрузите крутящие моменты и соответствующую эффективность.
Tabulated loss data as a function of speed, torque, and DC supply voltage — Определите ущербы от 3D поиска по таблице на основе обеспеченных сведенных в таблицу данных для частот вращения двигателя, загрузите крутящие моменты, напряжения предоставления DC и соответствующие потери.
Tabulated efficiency data as a function of speed, torque, and DC supply voltage — Определите ущербы от 3D поиска по таблице на основе обеспеченных сведенных в таблицу данных для частот вращения двигателя, загрузите крутящие моменты, напряжения предоставления DC и соответствующую эффективность.
Смотрите Моделирующие Электрические Потери для деталей.
Блок задает полную эффективность как
где:
τ 0 представляет Torque at which efficiency is measured.
ω 0 представляет Speed at which efficiency is measured.
P 0 представляет Fixed losses independent of torque or speed.
представляет зависимые крутящим моментом электрические потери.
kw ω2 представляет зависимые скоростью железные потери.
При инициализации блок решает уравнение эффективности для k. Блок пропускает потери, сопоставленные с затуханием ротора. Этот параметр видим, только если Parameterize losses by установлен в Single efficiency measurement. Значение по умолчанию является % 100.
Скорость, что использование блока, чтобы вычислить зависимые крутящим моментом электрические потери. Этот параметр видим, только если Parameterize losses by установлен в Single efficiency measurement. Значением по умолчанию является 3.75e+03
rpm.
Закрутите это использование блока, чтобы вычислить зависимые крутящим моментом электрические потери. Этот параметр видим, только если Parameterize losses by установлен в Single efficiency measurement. Значением по умолчанию является 0.08
Nm.
Железные потери на скорости и крутящий момент, в котором задана эффективность. Этот параметр видим, только если Parameterize losses by установлен в Single efficiency measurement. Значением по умолчанию является 0
W.
Фиксированная электрическая потеря сопоставила с драйвером, когда моторный ток и крутящий момент являются нулем. Этот параметр видим, только если Parameterize losses by установлен в Single efficiency measurement. Значением по умолчанию является 0
W.
Вектор значений скорости, чтобы использоваться для поиска по таблице при вычислении потерь. Этот параметр видим, только если Parameterize losses by установлен в Tabulated loss data as a function of speed and torque, Tabulated loss data as a function of speed, torque, and DC supply voltage, Tabulated efficiency data as a function of speed and torque или Tabulated efficiency data as a function of speed, torque, and DC supply voltage. Значением по умолчанию является [-8000 -4000 0 4000 8000]
rpm.
Вектор значений скорости, чтобы использоваться для поиска по таблице при вычислении потерь. Этот параметр видим, только если Parameterize losses by установлен в Tabulated loss data as a function of speed and torque, Tabulated loss data as a function of speed, torque, and DC supply voltage, Tabulated efficiency data as a function of speed and torque или Tabulated efficiency data as a function of speed, torque, and DC supply voltage. Значением по умолчанию является [0 0.03 0.06 0.09]
Nm.
Сведенные в таблицу значения за электрические потери как функция скорости и крутящего момента, чтобы использоваться для 2D поиска по таблице. Каждое значение в матрице задает потери для определенной комбинации скорости и крутящего момента. Матричный размер должен совпадать с размерностями, заданными векторами крутящего момента и скоростью. Этот параметр видим, только если Parameterize losses by установлен в Tabulated loss data as a function of speed and torque. Значением по умолчанию является [1.49 1.67 2.21 3.10; 0.42 0.69 1.14 2.03; 0.06 0.24 0.78 1.68; 0.42 0.69 1.14 2.03; 1.49 1.67 2.21 3.10]
W.
Сведенные в таблицу значения эффективности, в проценте, как функция скорости и крутящего момента, чтобы использоваться для 2D поиска по таблице. Каждое значение в матрице задает эффективность для определенной комбинации скорости и крутящего момента. Матричный размер должен совпадать с размерностями, заданными векторами крутящего момента и скоростью. Значения эффективности вы предусматриваете нулевую скорость или обнуляете крутящий момент, проигнорированы, и потери приняты нуль, когда или крутящий момент или скорость являются нулем. Блок использует линейную интерполяцию, чтобы определить потери. Обеспечьте сведенные в таблицу данные для низких скоростей и низких крутящих моментов, как требуется, чтобы получить желаемый уровень точности для более низких условий степени. Этот параметр видим, только если Parameterize losses by установлен в Tabulated efficiency data as a function of speed and torque. Значением по умолчанию является [95 95 95 95; 95 95 95 95; 95 95 95 95; 95 95 95 95; 95 95 95 95].
Вектор DC предоставляет напряжения, чтобы использоваться для поиска по таблице при вычислении потерь. Этот параметр видим, только если Parameterize losses by установлен в Tabulated loss data as a function of speed, torque, and DC supply voltage или Tabulated efficiency data as a function of speed, torque, and DC supply voltage. Значением по умолчанию является [100 200 400]
V.
Сведенные в таблицу значения за электрические потери как функция скорости, крутящего момента и DC предоставляют напряжение, чтобы использоваться для 3D поиска по таблице. Каждое значение в матрице задает потери для определенной комбинации скорости, крутящего момента и напряжения предоставления DC. Матричный размер должен совпадать с размерностями, заданными этими тремя векторами. Этот параметр видим, только если Parameterize losses by установлен в Tabulated loss data as a function of speed, torque, and DC supply voltage. Значением по умолчанию является ones(5,4,3)
W.
Сведенные в таблицу значения эффективности, в проценте, как функция скорости, крутящий момент и DC предоставляют напряжение, чтобы использоваться для 3D поиска по таблице. Каждое значение в матрице задает эффективность для определенной комбинации скорости, крутящего момента и напряжения предоставления DC. Матричный размер должен совпадать с размерностями, заданными этими тремя векторами. Значения эффективности вы предусматриваете нулевую скорость или обнуляете крутящий момент, проигнорированы, и потери приняты нуль, когда или крутящий момент или скорость являются нулем. Блок использует линейную интерполяцию, чтобы определить потери. Обеспечьте сведенные в таблицу данные для низких скоростей и низких крутящих моментов, как требуется, чтобы получить желаемый уровень точности для более низких условий степени. Этот параметр видим, только если Parameterize losses by установлен в Tabulated efficiency data as a function of speed, torque, and DC supply voltage. Значением по умолчанию является 95*ones(5,4,3).
Эквивалентное сопротивление использовало последовательно с предоставлением DC моделировать электрические потери, которые пропорциональны текущему предоставлению драйвера. Блок принимает, что DC предоставляет текущий, является приблизительно постоянным при постоянных условиях загрузки. Значением по умолчанию является 0
Ohms.
Эта вкладка появляется только для блоков с представленным портом управления отказа. Для получения дополнительной информации смотрите Отказы Симуляции.
Выбирает, инициирован ли отказ сигналом, который является высоким или низким:
Блок Faulted if F >= Fault threshold — Simplified PMSM Drive отключен, если сигнал в порте F повышается выше порогового значения. Это - опция по умолчанию.
Блок Faulted if F <= Fault threshold — Simplified PMSM Drive отключен, если сигнал в порте F падает ниже порогового значения.
Пороговое значение раньше обнаруживало отказ. Значением по умолчанию является 0.5.
Сопротивление ротора, чтобы измениться в моторном движении. Значением по умолчанию является 5e-06
kg*m2. Значение может быть нулем.
Затухание ротора. Значением по умолчанию является 1e-05
N*m/(rad/s). Значение может быть нулем.
Скорость ротора в начале симуляции. Значением по умолчанию является 0
rpm.
Эта вкладка появляется только для блоков с представленным тепловым портом. Для получения дополнительной информации смотрите Тепловые Порты.
Параметр α в сопротивлении определения уравнения как функция температуры, как описано в Тепловой Модели для Блоков Привода. Этот параметр видим, только если параметр Parameterize losses by на вкладке Electrical Losses устанавливается на Single efficiency measurement. Значение по умолчанию для меди и является 0.00393
1/K.
Температура, для которой заданы моторные параметры. Если вы параметризовали электрические ущербы от сведенных в таблицу данных потерь, то это - температура, для которой Corresponding losses, P(w,T) даны на вкладке Electrical Losses. Значением по умолчанию является 25
°C.
Температура, для которой Corresponding losses, P(w,T), at second measurement temperature даны. Этот параметр видим, только если параметр Parameterize losses by на вкладке Electrical Losses устанавливается на Tabulated loss data. Значением по умолчанию является 125
°C.
Железные потери при второй температуре измерения, соответствуя скорости и крутящему моменту свели в таблицу значения на вкладке Electrical Losses. Этот параметр видим, только если параметр Parameterize losses by на вкладке Electrical Losses устанавливается на Tabulated loss data. Значением по умолчанию является [1.49 1.74 2.49 3.74;0.42 0.67 1.42 2.67;0.06 0.31 1.06 2.31;0.42 0.67 1.42 2.67;1.49 1.74 2.49 3.74]
W.
Сведенные в таблицу значения эффективности, в проценте, при второй температуре измерения, соответствуя скорости и крутящему моменту свели в таблицу значения на вкладке Electrical Losses. Этот параметр видим, только если параметр Parameterize losses by на вкладке Electrical Losses устанавливается на Tabulated efficiency data as a function of speed and torque. Значением по умолчанию является [95 95 95 95; 95 95 95 95; 95 95 95 95; 95 95 95 95; 95 95 95 95].
Железные потери при второй температуре измерения, соответствуя скорости, крутящему моменту и напряжению предоставления DC свели в таблицу значения на вкладке Electrical Losses. Этот параметр видим, только если параметр Parameterize losses by на вкладке Electrical Losses устанавливается на Tabulated loss data as a function of speed, torque, and DC supply voltage. Значением по умолчанию является ones(5,4,3)
W.
Сведенные в таблицу значения эффективности, в проценте, при второй температуре измерения, соответствуя скорости, крутящему моменту и напряжению предоставления DC свели в таблицу значения на вкладке Electrical Losses. Этот параметр видим, только если параметр Parameterize losses by на вкладке Electrical Losses устанавливается на Tabulated efficiency data as a function of speed, torque, and DC supply voltage. Значением по умолчанию является 95*ones(5,4,3).
Эта вкладка появляется только для блоков с представленным тепловым портом. Для получения дополнительной информации смотрите Тепловые Порты.
Количество тепла электрической обмотки, заданной как энергия, требуемая повысить температуру одной степенью. Значением по умолчанию является 100 J/K.
Температура теплового порта в начале симуляции. Значением по умолчанию является 25
°C.
Двигатель постоянного тока | (Однофазная) машина индукции | Двигатель шунта | Универсальный двигатель
