Синхронная машина текущий ссылочный генератор
Simscape / Электрический / Управление / Управление SM
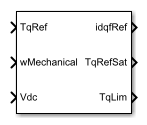
Блок SM Current Reference Generator реализует текущий ссылочный генератор для синхронной машины (SM) текущее управление в роторе d-q ссылочный кадр.
Блок SM Current Reference Generator может получить текущую ссылку с помощью одного из этих методов:
Нулевое управление d-оси (ZDAC).
Интерполяционные таблицы.
Для метода ZDAC, наборов блока:
D-ось текущая ссылка обнулять:
Поле текущая ссылка использование ссылки крутящего момента:
где if,max является максимальным текущим полем, и Tmax является максимальным крутящим моментом.
Q-ось текущая ссылка использование уравнения крутящего момента:
где Tref является ссылочным входом крутящего момента, и Kt является крутящим моментом, постоянным из синхронной машины, выраженной упрощенным уравнением крутящего момента .
Для операции ниже основной скорости синхронной машины ZDAC является подходящим методом. Выше основной скорости полевой контроллер ослабления обязан настраивать ссылку d-оси.
Чтобы предварительно сгенерировать текущие ссылки для нескольких рабочих точек, задайте три интерполяционных таблицы с помощью подхода интерполяционных таблиц:
и
[1] Girardin, A. и Г. Фридрих. "Оптимальное управление для ротора раны синхронный генератор начинающего". Промышленная Конференция по Приложениям, 2006, стр 14-19.
[2] Carpiuc, S., К. Лазарь и Д. Ай. Пэтрэску. "Оптимальное Управление Крутящим моментом Внешне Взволнованной Синхронной Машины". Управляйте Разработкой и Прикладной Информатикой, 14 (2), 2012, стр 80-88.





