Синхронная машина, ориентированная на поле на управление
Simscape / Электрический / Управление / Управление SM

SM, Ориентированный на поле на Блок управления, реализует синхронную машину (SM), ориентированную на поле на управляющую структуру. Поле ориентированное управление (FOC) является производительной стратегией управления электродвигателя переменного тока, которая разъединяет крутящий момент и поток путем преобразования стационарных токов фазы к вращающемуся кадру. Используйте FOC, когда скорость ротора и положение известны, и ваше приложение требует:
Высоко закрутите и низко текущий при запуске
Высокая эффективность
FOC SM составлен из нескольких блоков управления от библиотеки Control. Чтобы видеть и изменить эти блоки и внутреннюю структуру FOC, щелкните правой кнопкой по блоку по Simulink и выберите Mask> Look Under Mask. Полная управляющая структура составлена из нескольких частей:
Контроллер внешнего цикла преобразовывает ссылочный сигнал, который вы предоставляете к ссылочному d - оси, q - ось и полевые токи.
Можно выбрать тип ссылочного сигнала, который вы обеспечиваете использованию параметра Control mode:
Velocity control — Управляйте или отрегулируйте скорость вращения синхронной машины. Внутренний блок Velocity Controller генерирует ссылочный крутящий момент от скоростной погрешности ротора.
Torque control — Управляйте или отрегулируйте механический крутящий момент SM.
Внутренний блок SM Current Reference Generator генерирует ссылочные токи с помощью контроллера пропорционального интеграла (PI), минимизируя ошибку крутящего момента.
Контроллер внутреннего цикла преобразовывает текущие ссылки в ссылки напряжения. Внутренний SM Текущий Контроллер генерирует ссылки напряжения с помощью контроллера PI, минимизирующего текущую ошибку и условия feedforward:
где:
ωe является ротором электрическая угловая скорость.
Ld и Lq является d - и q - индуктивность статора оси.
Lmf является взаимной полевой индуктивностью арматуры.
id, iq, и if, является статором d-q и полевые токи возбуждения, соответственно.
Генератор PWM преобразовывает ссылочные напряжения статора в импульсы логического элемента, которые будут переданы Конвертеру Степени, который приводит в действие обмотки статора синхронной машины.
Возбуждение Генератор PWM преобразовывает напряжение поля ссылки в импульсы логического элемента, которые будут переданы Прерывателю DC-DC, приводящему в действие обмотку возбуждения SM.
Эта схема показывает полную архитектуру блока.
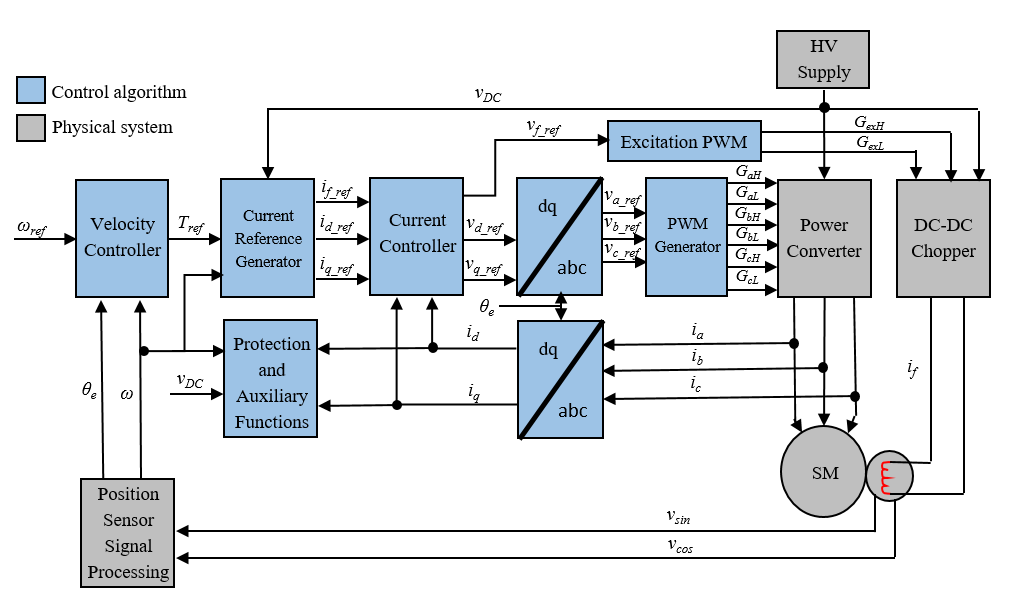
В схеме:
ω и ωref являются измеренными и ссылочными угловыми скоростями, соответственно.
Tref является ссылочным электромагнитным крутящим моментом. Если вы конфигурируете блок для регулировки скорости, Скоростной Контроллер генерирует этот ссылочный крутящий момент.
i и v являются токами статора и напряжениями. Индексы d, q, и f, представляют d-ось, q-ось и обмотку возбуждения. Индексы a, b, и c, представляют три обмотки статора.
θe является ротором электрический угол.
G является импульсом логического элемента, H индексов и L представляют высоко и низко, и преобразовывает в нижний индекс a, b и c, представляйте три обмотки статора. Нижний ex представляет полевые импульсы возбуждения.
Можно принять решение реализовать или скорость или управление крутящим моментом с параметром Control mode. Блок реализует скоростное управление точно как показано в схеме. Блок реализует управление крутящим моментом путем удаления блока Velocity Controller и принятия ссылочного крутящего момента непосредственно.
Параметры машины известны.
Управляющая структура реализована с одной частотой дискретизации.
[1] Märgner, M. и В. Хакманн. "Управляйте проблемами внешне взволнованной синхронной машины в автомобильном приложении диска тяги". В Train Emobility-электроэнергии. (2010): 1–6.
[2] Carpiuc, S., К. Лазарь и Д. Пэтрэску. "Оптимальное Управление Крутящим моментом Внешне Взволнованной Синхронной Машины". Журнал Разработки Управления и Прикладной Информатики. 14, № 2 (2012): 80–88.

