PurePursuit является алгоритмом отслеживания пути. Это вычисляет угловую скоростную команду, которая перемещает робота от его текущего положения, чтобы достигнуть некоторой предварительной точки перед роботом. Линейная скорость принята постоянная, следовательно можно изменить линейную скорость робота в любой точке. Алгоритм затем перемещает предварительную точку на пути на основе текущего положения робота до последней точки пути. Можно думать об этом как о роботе, постоянно преследуя точку перед ним. Свойство LookAheadDistance решает, как далеко предварительная точка помещается.
Класс PurePursuit (robotics.PurePursuit) не является традиционным контроллером, но действует как алгоритм отслеживания в целях следования траектории. В Robotics System Toolbox™ вы создаете контроллер PurePursuit и задаете список waypoints. Желаемые линейные и максимальные угловые скорости могут быть заданы. Эти свойства определяются на основе спецификаций робота. Учитывая положение (положение и ориентация) робота как вход, объект может использоваться, чтобы вычислить линейные и угловые скоростные команды для робота. То, как робот использует эти команды, зависит от системы, которую вы используете, поэтому рассмотрите, как роботы могут выполнить движение, учитывая эти команды. Итоговым важным свойством является LookAheadDistance, который говорит роботу как далеко вперед на пути отслеживать к. Это свойство объяснено более подробно в разделе ниже.
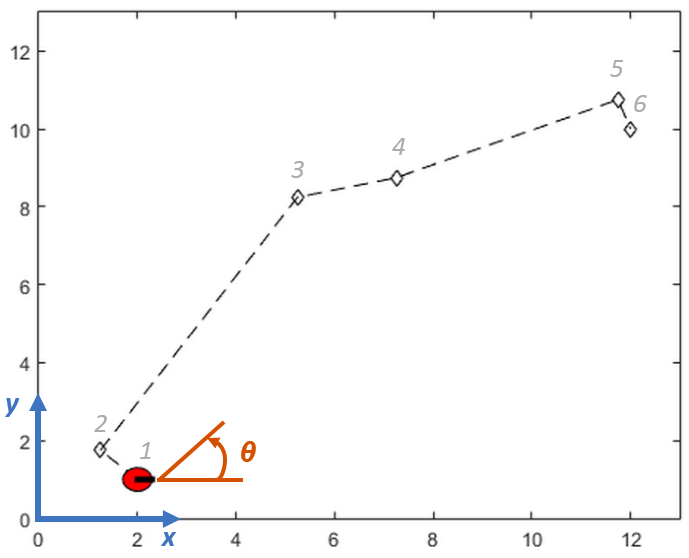
Важно понять ссылочный координатный кадр, используемый алгоритмом PurePursuit для его вводов и выводов. Фигура ниже показов система координат привязки. Вход waypoints является координатами [x y], которые используются, чтобы вычислить скоростные команды робота. Положение робота вводится как положение и ориентация (тета) список точек как [x y theta]. Положительный x и направления y находятся в праве и направлениях соответственно (синие в фигуре). Значение theta является угловой ориентацией робота, измеренного против часовой стрелки в радианах от x - ось (робот в настоящее время в радианах 0).
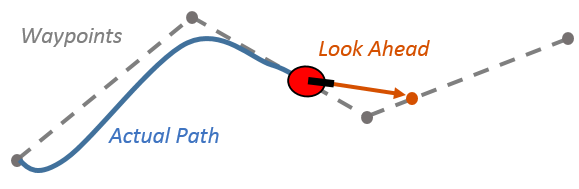
Свойство LookAheadDistance является основным параметром настройки для контроллера PurePursuit. Взгляд вперед дистанцирует, то, как далеко вдоль пути робот должен выглядеть от текущего местоположения, чтобы вычислить угловые скоростные команды. Фигура ниже показов робот и предварительная точка. Как отображено в этом изображении, обратите внимание, что фактический путь не совпадает с прямой линией между waypoints.
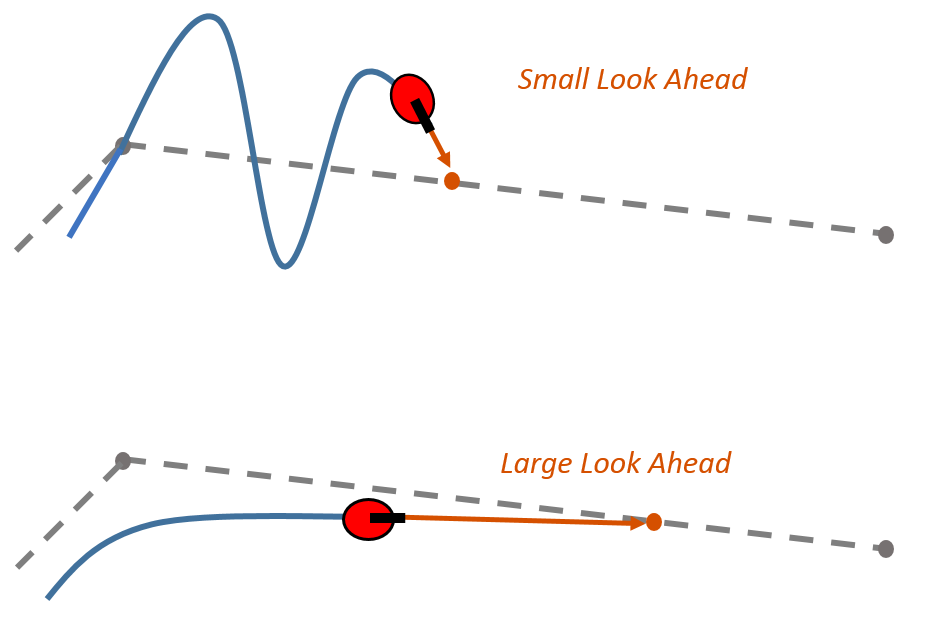
Эффект изменения этого параметра может измениться, как ваш робот отслеживает путь и существует два главных гола: восстановление пути и поддержание пути. По порядку, чтобы быстро возвратить путь между waypoints, маленький LookAheadDistance заставит вашего робота перемещаться быстро к пути. Однако как видно в фигуре ниже, робот промахивается по пути и колеблется вдоль желаемого пути. В порядке уменьшать колебания вдоль пути, смотрит вперед большее, расстояние может быть выбрано, однако, это может привести к большим искривлениям около углов.
Свойство LookAheadDistance должно быть настроено для вашего приложения и системы робота. Различные линейные и угловые скорости будут влиять на этот ответ также и должны быть рассмотрены для контроллера следования траектории.
Существует несколько ограничений, чтобы отметить об этом алгоритме PurePursuit:
Как показано выше, контроллер не может точно следовать за прямыми путями между waypoints. Параметры должны быть настроены, чтобы оптимизировать производительность и сходиться к пути в зависимости от времени.
Этот алгоритм PurePursuit не стабилизирует робота в точке. В вашем приложении порог расстояния для целевого местоположения должен быть применен, чтобы остановить робота около желаемой цели. Это видно в примере следования траектории: Следование траектории для Робота с дифференциальным приводом.
[1] Коултер, R. Реализация чистого алгоритма отслеживания пути к преследованию. Университет Карнеги-Меллон, Питтсбург, Пенсильвания, январь 1990.
robotics.PRM | robotics.PurePursuit | robotics.VectorFieldHistogram
