Этот пример показывает рабочий процесс для переменных значений неуверенности через несколько Неопределенных блоков Пространства состояний в модели Simulink®. Используйте этот подход для сложных моделей с большим количеством неопределенных переменных или Неопределенных блоков Пространства состояний.
Этот раздел использует модель Simulink, чтобы предоставить постепенные инструкции для переключения между номинальными и пользовательскими значениями неуверенности в подсказке MATLAB®.
Откройте модель Simulink rct_sim_ex2.
rct_sim_ex2
Модель содержит два Неопределенных блока Пространства состояний, как показано в следующей фигуре.
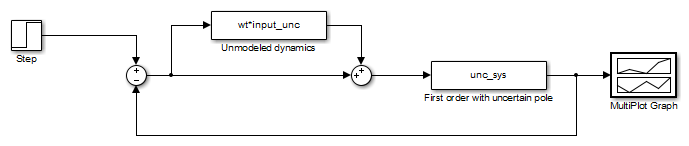
Unmodeled dynamics и блоки First order with uncertain pole зависят от неопределенных переменных input_unc и a.
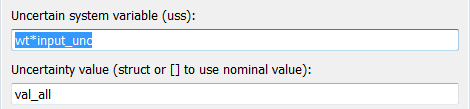
Дважды кликните блок Unmodeled dynamics, чтобы открыть диалоговое окно параметров блоков. Поле значения Неуверенности содержит переменную val_all. Точно так же поле значения Неуверенности в диалоговом окне параметров блоков First order with uncertain pole содержит переменную val_all. Вы используете эту переменную, чтобы отличаться неопределенные значения переменных через обоих Неопределенные блоки Пространства состояний.
При определении val_all можно ввести только подмножество неопределенных переменных, на которые ссылается модель в структуре. Когда вы не задаете некоторые неопределенные переменные, программное обеспечение использует их номинальную стоимость во время симуляции.
В посдказке MATLAB задайте val_all = []; и нажатие кнопки
![]()
моделировать модель.
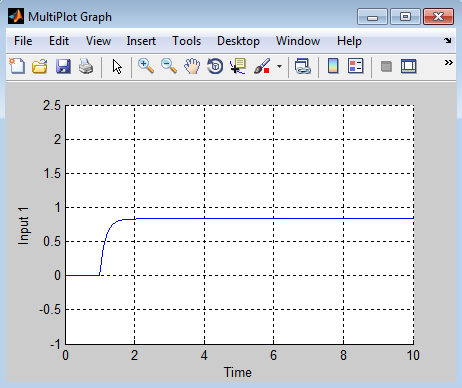
Программное обеспечение использует номинальную стоимость неопределенных переменных a и input_unc во время симуляции. После того, как симуляция завершается, блок MultiPlot Graph показывает следующей фигуре.
Сгенерируйте случайные выборки значений неуверенности:
Найдите все Неопределенные блоки Пространства состояний, и сопоставил неопределенные переменные в модели.
uvars=ufind('rct_sim_ex2')
MATLAB возвращает следующий результат:
uvars =
a: [1x1 ureal] input_unc: [1x1 ultidyn]
Неопределенными переменными a и input_unc является ureal и объекты ultidyn, соответственно и структура, uvars перечисляет их по наименованию.
Случайным образом демонстрационный неопределенные переменные.
val_all = usample(uvars)
MATLAB возвращает следующий результат:
val_all =
a: -1.1167 input_unc: [1x1 ss]
Структура val_all содержит демонстрационные значения неопределенных переменных a и input_unc. Программное обеспечение выбирает значения в заданных областях значений неуверенности для a и input_unc.
Моделируйте модель для значений неуверенности val_all. Путем повторения процесса в цикле for можно оценить, как неуверенность влияет на образцовые ответы. Например, выполните 10 симуляций с помощью случайных значений неуверенности:
for i=1:10;
val_all = usample(uvars)
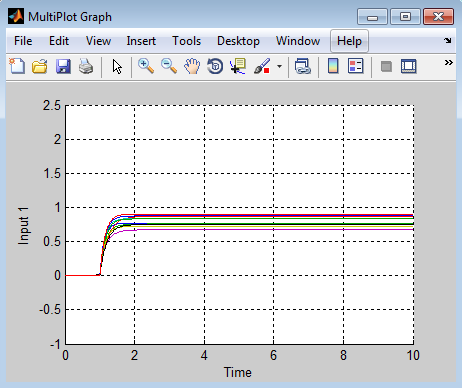
sim('rct_sim_ex2',10);
endВо время каждой симуляции, демонстрационных значений программного обеспечения неопределенных переменных input_unc и a и графиков ответ для выбранных значений. Блок MultiPlot Graph показывает следующие ответы, полученные с помощью значений случайной выборки неопределенных переменных.