Этот пример показывает, как заполнить 1D блок Lookup Table с помощью диалогового окна параметра. Интерполяционная таблица в этом примере аппроксимирует функциональный y = x 3 в области значений [-3, 3].
Скопируйте 1D блок Lookup Table от библиотеки блоков Интерполяционных таблиц до модели Simulink®.
В 1D диалоговом окне блока Lookup Table введите табличные размерности и табличные данные в заданных полях диалогового окна:
Установите Number of table dimensions на 1.
Установите Table data на [-27 -8 -1 0 1 8 27].
Также, чтобы использовать существующий объект (Simulink.LookupTable) интерполяционной таблицы, выберите Data specification> Lookup table object.
Введите набор данных точки останова с помощью любого из двух методов:
Чтобы задать равномерно распределенные точки данных, установите Breakpoint specification на Even spacing. Установите First point на -3 и Spacing к 1. Блок вычисляет количество равномерно расположенных с интервалами точек останова на основе табличных данных.
Чтобы задать данные о точке останова явным образом, установите Breakpoint specification на Explicit values и установите Breakpoints 1 на [-3:3].
Используйте следующую процедуру, чтобы заполнить 2D блок Lookup Table с помощью Редактора Интерполяционной таблицы. В этом примере интерполяционная таблица аппроксимирует функциональный z = x 2 + y 2 по входным диапазонам x = [0, 2] и y = [0, 2].
Скопируйте 2D блок Lookup Table от библиотеки блоков Интерполяционных таблиц до модели Simulink.
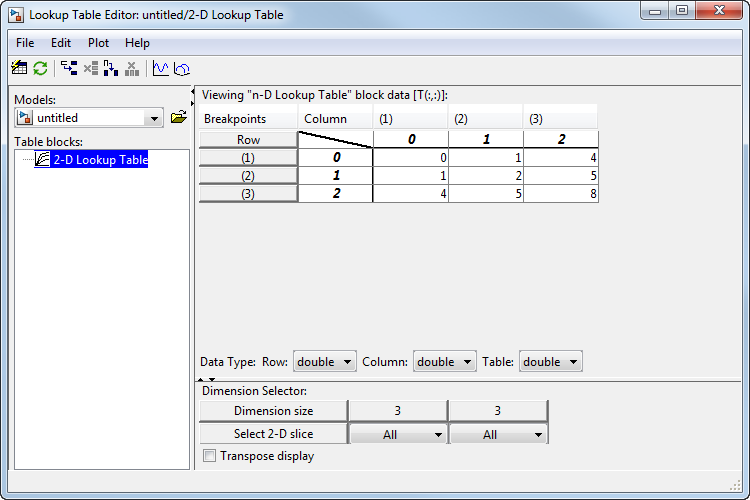
Откройте Редактор Интерполяционной таблицы путем выбора Lookup Table Editor из меню Simulink Edit или путем нажатия на Edit table and breakpoints на диалоговом окне 2D блока Lookup Table.
Под Viewing "n-D Lookup Table" block data введите наборы данных точки останова и табличные данные в соответствующих ячейках. Чтобы изменить данные, кликните по ячейке, введите новое значение и нажмите Enter.
В ячейках, сопоставленных с Row Breakpoints, введите каждое из значений [0 1 2].
В ячейках, сопоставленных с Column Breakpoints, введите каждое из значений [0 1 2].
В ячейках данных таблицы введите значения в массив [0 1 4; 1 2 5; 4 5 8].
Редактор Интерполяционной таблицы выглядит так:
В Редакторе Интерполяционной таблицы выберите File> Update Block Data, чтобы обновить данные в 2D блоке Lookup Table.
Закройте редактор интерполяционной таблицы.
Используйте следующую процедуру, чтобы заполнить блок Lookup Table Dynamic с помощью что импорт блока. В этом примере интерполяционная таблица аппроксимирует функциональный y = 3x2 в области значений [0, 10].
Скопируйте блок Lookup Table Dynamic от библиотеки блоков Интерполяционных таблиц до модели Simulink.
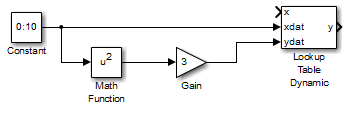
Копия блоки должна была реализовать уравнение y = 3x2 к модели Simulink:
Один блок Constant, чтобы задать входной диапазон, от библиотеки Sources
Один блок Math Function, чтобы придать входному диапазону квадратную форму, от библиотеки Math Operations
Один блок Gain, чтобы умножить сигнал на 3, также от библиотеки Math Operations
Присвойте следующие значения параметров Постоянной, Математической функции и блоки Усиления с помощью их диалоговых окон:
| Блок | Параметр | Значение |
|---|---|---|
| Постоянный | Constant value | 0:10 |
| Математическая функция | Function | square |
| Усиление | Gain | 3 |
Введите набор данных точки останова к блоку Lookup Table Dynamic путем соединения выходного порта блока Constant к импорту блока Lookup Table Dynamic, маркировал xdat. Этот сигнал является входным набором данных точки останова для x.
Введите табличные данные к блоку Lookup Table Dynamic путем ветвления выходного сигнала блока Constant и соединения его с блоком Math Function. Затем соедините блок Math Function с блоком Gain. Наконец, соединитесь, блок Gain к импорту блока Lookup Table Dynamic маркировал ydat. Этот сигнал является табличными данными для y.
Динамическая интерполяционная таблица | Интерполяционная таблица n-D
