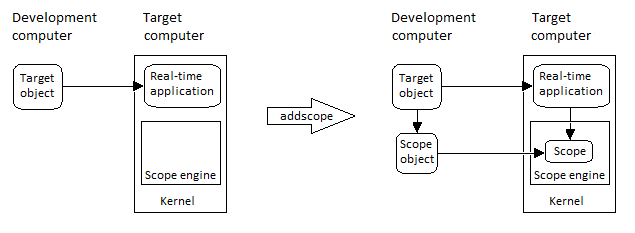
Создайте осциллограф заданного типа
scope_object = addscope(target_object)scope_object = addscope(target_object, scope_type, scope_number)scope_object_vector = addscope(target_object, scope_type, scope_number_vector)scope_object = addscope(target_object)Scopes целевого объекта. Это возвращает объект, представляющий этот осциллограф.
scope_object = addscope(target_object, scope_type, scope_number)
scope_object_vector = addscope(target_object, scope_type, scope_number_vector)
addscope обновляет свойство Scopes целевого объекта. Если результат не присвоен переменной MATLAB®, свойства объектов осциллографа перечислены в Командном окне.
Поддержка продукта Simulink® Real-Time™ девять целевых осциллографов, восемь осциллографов файла, и столько осциллографов хоста, сколько ресурсы целевого компьютера могут поддержать. При попытке добавить осциллограф с тем же индексом как существующий осциллограф, результатом является ошибка.
В командной строке целевого компьютера можно добавить осциллограф единой цели:
addscope
addscope scope_numberSimulinkRealTime.target | Команды целевого компьютера | getscope | remscope
