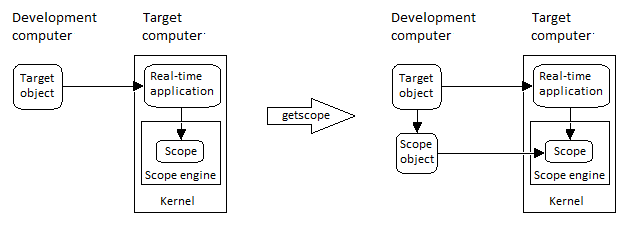
Возвратите осциллограф, идентифицированный номером осциллографа
scope_object_vector = getscope(target_object)scope_object = getscope(target_object, scope_number)scope_object_vector = getscope(target_object, scope_number_vector)scope_object_vector = getscope(target_object)
scope_object = getscope(target_object, scope_number)
scope_object_vector = getscope(target_object, scope_number_vector)
При попытке получить несуществующий осциллограф, результатом является ошибка.
Real-Time File Scope | Real-Time Host Scope | Real-Time Target Scope | SimulinkRealTime.target | addscope | remscope
