

Продольное колесо с диском, барабаном или сопоставленным тормозом
Powertrain Blockset / Ходовая часть / Колеса
Vehicle Dynamics Blockset / Колеса и Шины
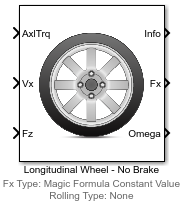
Блок Longitudinal Wheel реализует продольное поведение идеального колеса. Можно задать продольный метод расчета силы и сопротивления качению и тормозить тип. Используйте блок в автомобильной трансмиссии и продольных симуляциях транспортного средства, где низкочастотная дорога шины и тормозные усилия обязаны определять ускорение транспортного средства, торможение и сопротивление качению колеса. Например, можно использовать блок, чтобы определить крутящий момент и требования к питанию для заданного цикла диска или тормозящего события. Блок не подходит для приложений, которые требуют объединенного бокового промаха.
Существует четыре типа блоков Longitudinal Wheel. Каждый блок реализует различный тип тормоза.
| Имя блока | Тормозите установку типа | Тормозите реализацию |
|---|---|---|
| Longitudinal Wheel - No Brake |
|
'none' |
| Longitudinal Wheel - Disc Brake |
|
Тормоз, который преобразует давление в тормозном цилиндре в тормозное усилие. |
| Longitudinal Wheel - Drum Brake |
|
Симплексный барабанный тормоз, который преобразует приложенную силу и геометрию тормоза в сетевой тормозной момент. |
| Longitudinal Wheel - Mapped Brake |
|
Интерполяционная таблица, которая является функцией скорости колеса и примененного тормозного давления. |
Модели блока продольная сила как функция колеса уменьшаются относительно дорожного покрытия. Чтобы вычислить продольную силу, задайте один из этих параметров Longitudinal Force.
| Установка | Блокируйте реализацию |
|---|---|
|
|
Волшебная Формула с постоянным коэффициентом для жесткости, формы, пика и искривления. |
|
|
Волшебная Формула с зависимыми загрузкой коэффициентами та реализация уравнения 4. E9 до 4. E18 в Шине и Динамике аппарата. |
|
|
Интерполяционная таблица, которая является функцией нормальной силы и отношения промаха колеса. |
Чтобы вычислить крутящий момент сопротивления качению, задайте один из этих параметров Rolling Resistance.
| Установка | Блокируйте реализацию |
|---|---|
| 'none' |
| Метод в Пошаговой Методологии Coastdown для Измерения Сопротивления качению Шины. Сопротивление качению является функцией давления воздуха в шине, нормальной силы и скорости. |
| Метод задан в ISO 28580:2018, Легковом автомобиле, методе измерения сопротивления качению шины по производству грузовых автомобилей и автобусов — Один тест точки и корреляция результатов измерения. |
| Волшебные уравнения формулы от 4. E70 в Шине и Динамике аппарата. Волшебная формула является эмпирическим уравнением на основе подходящих коэффициентов. |
| Интерполяционная таблица, которая является функцией нормальной силы и оси вращения продольная скорость. |
Чтобы вычислить вертикальное движение, задайте один из этих параметров Vertical Motion.
| Установка | Блокируйте реализацию |
|---|---|
| Блок передает прикладывавшие силы шасси непосредственно до сопротивления качению и продольных вычислений силы. |
| Вертикальное движение зависит от жесткости колеса и затухания. Жесткость является функцией смещения боковой стены шины и давления. Затухание является функцией скорости боковой стены шины и давления. |
Блок вычисляет инерционный ответ колеса, удовлетворяющего:
Потери оси
Тормозите и управляйте крутящим моментом
Утомите сопротивление качению
Оснуйте контакт через дорожный шиной интерфейс
Входной крутящий момент является суммированием прикладного крутящего момента оси, тормозного момента, и момент, являющийся результатом объединенного крутящего момента шины.
В настоящий момент являясь результатом объединенного крутящего момента шины, блок реализует тяговые силы колеса и сопротивление качению с динамикой первого порядка. Сопротивлению качению параметризовали постоянную времени в терминах релаксационной длины.
Чтобы вычислить крутящий момент сопротивления качению, можно задать один из этих параметров Rolling Resistance.
| Установка | Блокируйте реализацию |
|---|---|
| Блокируйте сопротивление качению наборов, |
| Блок использует метод в SAE Пошаговая Методология Coastdown для Измерения Сопротивления качению Шины. Сопротивление качению является функцией давления воздуха в шине, нормальной силы и скорости. А именно,
|
| Блок использует метод, заданный в ISO 28580:2018, Легковом автомобиле, методе измерения сопротивления качению шины по производству грузовых автомобилей и автобусов — Один тест точки и корреляция результатов измерения. Метод составляет нормальную загрузку, паразитную потерю и тепловые коррекции от условий испытания. А именно, |
| Блок вычисляет сопротивление качению, |
| Для сопротивления качению, |
Если тормоза включены, блок определяет торможение заблокированное или разблокированное условие на основе идеализированной сухой модели трения муфты. На основе условия тупика блок реализует их трение и динамические модели.
| Если | Условие тупика | Модель трения | Динамическая модель |
|---|---|---|---|
Разблокированный | |||
Заблокированный |
Уравнения используют эти переменные.
| ω | Скорость вращения колеса |
| a | Независимый от скорости компонент силы |
| b | Линейный скоростной компонент силы |
| c | Квадратичный скоростной компонент силы |
| Le | Утомите релаксационную длину |
| J | Момент инерции |
| My | Крутящий момент сопротивления качению |
| Ta | Прикладной крутящий момент оси |
| Tb | Тормозной момент |
| Td | Объединенный крутящий момент шины |
| Tf | Фрикционный крутящий момент |
| Ti | Сетевой входной крутящий момент |
| Tk | Кинетический фрикционный крутящий момент |
| To | Сетевой выходной крутящий момент |
| Ts | Статический фрикционный крутящий момент |
| Fc | Прикладывавшая сила муфты |
| Fx | Продольная сила, разработанная дорогой шины, взаимодействует через интерфейс должный уменьшиться |
| Reff | Эффективный радиус муфты |
| Ro | Кольцевой диск внешний радиус |
| Ri | Кольцевой диск внутренний радиус |
| Re | Эффективный радиус шины, в то время как при загрузке и при данном давлении |
| Vx | Продольная скорость оси |
| Fz | Транспортное средство нормальная сила |
| Cr | Постоянное сопротивление качению |
| Tamb | Температура окружающей среды |
| Tmeas | Измеренная температура для постоянного сопротивления качению |
| Fpl | Паразитная потеря силы |
| Kt | Тепловой поправочный коэффициент |
| ɑ | Экспонента давления воздуха в шине |
| β | Нормальная экспонента силы |
| pi | Давление воздуха в шине |
| μs | Коэффициент статического трения |
| μk | Коэффициент кинетического трения |
Если вы задаете параметр Brake Type Disc, блок реализует дисковый тормоз. Этот рисунок показывает виды сбоку и виды спереди дискового тормоза.
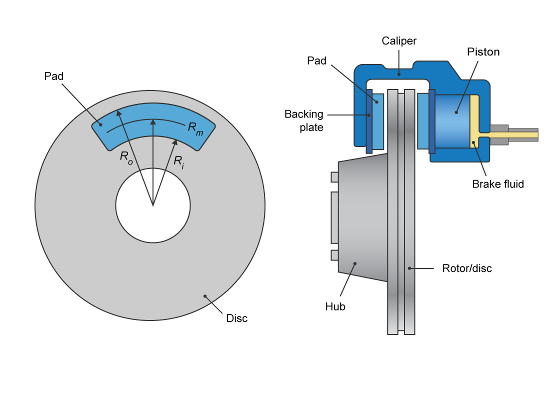
Дисковый тормоз преобразует давление в тормозном цилиндре от тормозного цилиндра в силу. Дисковый тормоз прикладывает силу в среднем радиусе тормозной колодки.
Блок использует эти уравнения, чтобы вычислить момент привода для дискового тормоза.
Уравнения используют эти переменные.
| T | Момент привода |
| P | Прикладное тормозное давление |
| N | Скорость колеса |
| Npads | Количество тормозных колодок в блоке дискового тормоза |
| μstatic | Коэффициент ротора клавиатуры диска статического трения |
| μ | Коэффициент ротора клавиатуры диска кинетического трения |
| Ba | Тормозите внутренний диаметр привода |
| Rm | Средний радиус тормозной колодки обеспечивает приложение на тормозном роторе |
| Ro | Внешний радиус тормозной колодки |
| Ri | Внутренний радиус тормозной колодки |
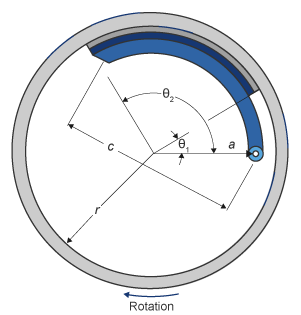
Если вы задаете параметр Brake Type Drum, блок реализует статический (установившийся) симплексный барабанный тормоз. Симплексный барабанный тормоз состоит из одного двухстороннего гидравлического привода и двух тормозных колодок. Тормозные колодки не совместно используют общий контакт стержня.
Симплексная модель барабанного тормоза использует приложенную силу и геометрию тормоза, чтобы вычислить крутящий момент привода для каждой тормозной колодки. Модель барабана принимает, что приводы и геометрия обуви симметричны для обеих сторон, позволяя одному набору геометрии и параметров трения использоваться в обоих ботинках.
Блок реализует уравнения, которые выведены из этих уравнений в Основных принципах Элементов Машины.
Уравнения используют эти переменные.
| T | Момент привода |
| P | Прикладное тормозное давление |
| N | Скорость колеса |
| μstatic | Коэффициент ротора клавиатуры диска статического трения |
| μ | Коэффициент ротора клавиатуры диска кинетического трения |
| Trshoe | Момент привода правого ботинка |
| Tlshoe | Момент привода левого ботинка |
| a | Расстояние от барабана центрируется к центру контакта стержня обуви |
| c | Расстояние от стержня обуви прикрепляет центр, чтобы тормозить связь привода на тормозной колодке |
| r | Барабан внутренний радиус |
| Ba | Тормозите внутренний диаметр привода |
| Θ1 | Угол от стержня обуви прикрепляет центр, чтобы запуститься материала тормозной колодки по обуви |
| Θ2 | Угол от стержня обуви прикрепляет центр к концу материала тормозной колодки по обуви |
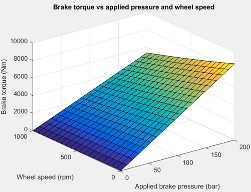
Если вы задаете параметр Brake Type Mapped, блок использует интерполяционную таблицу, чтобы определить момент привода.
Уравнения используют эти переменные.
| T | Момент привода |
Интерполяционная таблица момента привода | |
| P | Прикладное тормозное давление |
| N | Скорость колеса |
| μstatic | Коэффициент трения поверхности клавиатуры барабана взаимодействует через интерфейс при статических условиях |
| μ | Коэффициент трения интерфейса ротора клавиатуры диска |
Интерполяционная таблица для момента привода, , функция прикладного тормозного давления и скорости колеса, где:
T является моментом привода в N · m.
P является примененным тормозным давлением в панели.
N является скоростью колеса в об/мин.
Чтобы смоделировать блок Longitudinal Wheel продольные силы, можно использовать Волшебную Формулу. Модель предоставляет установившемуся tire characteristic function F x = f (κ, F z), продольная сила F x на шине, на основе:
Вертикальная загрузка F z
Промах колеса κ
Модель Magic Formula использует эти переменные.
| Ω | Скорость вращения колеса |
| r w | Радиус колеса |
| V x | Концентратор колеса продольная скорость |
| rwΩ | Утомите шаг продольная скорость |
| V sx = r wΩ – V x | Скорость промаха колеса |
| κ = V sx / | V x | | Промах колеса |
| F z, F z0 | Вертикальная загрузка и номинальная вертикальная нагрузка на шину |
| F x = f (κ, F z) | Продольная сила порождена на шину в контактной точке. Также характеристическая функция f шины. |
Если вы устанавливаете Longitudinal Force на Magic Formula constant value, блок реализует Волшебную Формулу как определенную форму характеристической функции шины, охарактеризованной четырьмя безразмерными коэффициентами (B, C, D, E), или жесткость, форма, пик и искривление:
Наклоном f в κ = 0 является B C D · F z.
Коэффициенты основаны на эмпирических данных о шине. Эти значения являются типичными наборами постоянных Волшебных коэффициентов Формулы для общих дорожных условий.
| Поверхность | B | C | D | E |
|---|---|---|---|---|
| Сухое гудронированное шоссе | 10 | 1.9 | 1 | 0.97 |
| Влажное гудронированное шоссе | 12 | 2.3 | 0.82 | 1 |
| Снег | 5 | 2 | 0.3 | 1 |
| Лед | 4 | 2 | 0.1 | 1 |
Если вы устанавливаете Longitudinal Force на Magic Formula pure longitudinal slip, блок реализует более общую Волшебную Формулу с помощью безразмерных коэффициентов, которые являются функциями загрузки шины. Блок реализует продольные уравнения силы в Главе 4 Шины и Динамики аппарата, включая 4. E9 до 4. E18:
SHx и SVx представляют смещения к промаху и продольной силе в функции промаха силы, или горизонтали и вертикальным смещениям, если функция построена как кривая. μx является зависимым продольной нагрузкой коэффициентом трения. εx является небольшим числом, вставленным, чтобы предотвратить деление на нуль как нуль подходов Fz.
Если вы не выбираете вертикальных степеней свободы установкой Vertical Motion к None, блок передает прикладывавшие силы шасси непосредственно до сопротивления качению и продольных вычислений силы.
Если вы устанавливаете Vertical Motion на Mapped stiffness and damping, вертикальное движение зависит от жесткости колеса и затухания. Жесткость является функцией смещения боковой стены шины и давления. Затухание является функцией скорости боковой стены шины и давления.
Блок определяет вертикальный ответ с помощью этого дифференциального уравнения.
Когда вы отключаете вертикальную степень свободы, вход, нормальная сила от транспортного средства передает непосредственно продольным и прокручивающимся вычислениям силы.
Блок использует зафиксированную колесом систему координат, чтобы разрешить вертикальные силы.

Уравнения используют эти переменные.
| Fztire |
Утомите нормальную силу вдоль зафиксированной колесом оси z |
| m |
Масса оси |
| Fzk |
Утомите нормальную силу из-за жесткости колеса вдоль зафиксированной колесом оси z |
| Fzb |
Утомите нормальную силу из-за затухания колеса вдоль зафиксированной колесом оси z |
| Fz |
Приостановка или транспортное средство нормальная сила вдоль зафиксированной колесом оси z |
| PTire |
Давление воздуха в шине |
|
Утомите смещение, скорость и ускорение, соответственно, вдоль зафиксированной колесом оси z |
Для учета степени блок реализует эти уравнения.
| Сигнал шины | Описание | Уравнения | ||
|---|---|---|---|---|
|
|
| Тяговое питание подано от оси | |
| Внешний крутящий момент, примененный осью к колесу | |||
| Вертикальная сила применилась к колесу транспортным средством или приостановкой | |||
|
|
| Тяговые потери мощности | ||
| Степень сопротивления качению | |||
| Мощность торможения | |||
| Прокрутка вязкой потери затухания | |||
| Вертикальная степень затухания | |||
|
|
| Скорость изменения вертикальной кинетической энергии | ||
| Скорость изменения вращательной кинетической энергии | |||
| Скорость изменения сохраненной потенциальной энергии боковой стены | |||
| Скорость изменения гравитационной потенциальной энергии | |||
Уравнения используют эти переменные.
| ω | Скорость вращения колеса |
| b | Линейный скоростной компонент силы |
| Fx | Продольная сила, разработанная дорогой шины, взаимодействует через интерфейс должный уменьшиться |
| Fcp | Утомите силу промаха в закрашенной фигуре контакта |
| Fz | Транспортное средство нормальная сила |
| Fzb | Утомите нормальную силу из-за затухания колеса |
| Fzk | Утомите нормальную силу из-за жесткости колеса |
| Iyy | Колесо вращательная инерция |
| Mbrk | Торможение момента |
| My | Крутящий момент сопротивления качению |
| Re | Эффективный радиус шины, в то время как при загрузке и при данном давлении |
| T | Крутящий момент оси применяется на колесо |
| Vx | Продольная скорость оси |
Утомите смещение, скорость и ускорение, соответственно | |
| ω | Скорость вращения колеса |
Транспортное средство вертикальная скорость вдоль зафиксированной транспортным средством оси z |
BrkPrs — Тормозное давлениеscalarТормозное давление, в Па.
Чтобы создать этот порт, для параметра Brake Type, задают один из этих типов:
Disc
Drum
Mapped
AxlTrq — Крутящий момент осиscalarКрутящий момент оси, Ta, об оси вращения колеса, в N · m.
Vx — СкоростьscalarОсь продольная скорость вдоль транспортного средства (тело) - зафиксированная ось X, в m/s.
Fz — Нормальная силаscalarАбсолютное значение приостановки или транспортного средства нормальная сила вдоль зафиксированной телом оси z, в N.
Gnd — Оснуйте смещениеscalarОснуйте смещение, Grndz, вдоль отрицательной зафиксированной колесом оси z, в m.
Создать Gnd:
Установите Vertical Motion на Mapped stiffness and damping.
На панели Vertical выберите Input ground displacement.
lam_mux — Масштабный коэффициент тренияscalarПродольный масштабный коэффициент трения, безразмерный.
Чтобы создать этот порт, выберите Input friction scale factor.
TirePrs — Давление воздуха в шинеscalarДавление воздуха в шине, в Па.
Создать этот порт:
Установите один из этих параметров:
Longitudinal Force к Magic Formula pure longitudinal slip.
Rolling Resistance к Pressure and velocity или Magic Formula.
Vertical Motion к Mapped stiffness and damping.
На панели Wheel Dynamics выберите Input tire pressure.
Tamb — Температура окружающей средыscalarТемпература окружающей среды, Tamb, в K.
Создать этот порт:
Установите Rolling Resistance на ISO 28580.
На панели Rolling Resistance выберите к Input ambient temperature.
Longitudinal Force — Выберите типMagic Formula constant value (значение по умолчанию) | Magic Formula pure longitudinal slip | Mapped forceМодели блока продольная сила как функция колеса уменьшаются относительно дорожного покрытия. Чтобы вычислить продольную силу, задайте один из этих параметров Longitudinal Force.
| Установка | Блокируйте реализацию |
|---|---|
|
|
Волшебная Формула с постоянным коэффициентом для жесткости, формы, пика и искривления. |
|
|
Волшебная Формула с зависимыми загрузкой коэффициентами та реализация уравнения 4. E9 до 4. E18 в Шине и Динамике аппарата. |
|
|
Интерполяционная таблица, которая является функцией нормальной силы и отношения промаха колеса. |
| Выбор | Включает эти параметры |
|---|---|
| Pure longitudinal peak factor, Dx Pure longitudinal shape factor, Cx Pure longitudinal stiffness factor, Bx Pure longitudinal curvature factor, Ex |
| Cfx shape factor, PCX1 Longitudinal friction at nominal normal load, PDX1 Frictional variation with load, PDX2 Frictional variation with camber, PDX3 Longitudinal curvature at nominal normal load, PEX1 Variation of curvature factor with load, PEX2 Variation of curvature factor with square of load, PEX3 Longitudinal curvature factor with slip, PEX4 Longitudinal slip stiffness at nominal normal load, PKX1 Variation of slip stiffness with load, PKX2 Slip stiffness exponent factor, PKX3 Horizontal shift in slip ratio at nominal normal load, PHX1 Variation of horizontal slip ratio with load, PHX2 Vertical shift in load at nominal normal load, PVX1 Variation of vertical shift with load, PVX2 Linear variation of longitudinal slip stiffness with tire pressure, PPX1 Quadratic variation of longitudinal slip stiffness with tire pressure, PPX2 Linear variation of peak longitudinal friction with tire pressure, PPX3 Quadratic variation of peak longitudinal friction with tire pressure, PPX4 Linear variation of longitudinal slip stiffness with tire pressure, PPX1 Slip speed decay function scaling factor, lam_muV Brake slip stiffness scaling factor, lam_Kxkappa Longitudinal shape scaling factor, lam_Cx Longitudinal curvature scaling factor, lam_Ex Longitudinal horizontal shift scaling factor, lam_Hx Longitudinal vertical shift scaling factor, lam_Vx |
| Slip ratio breakpoints, kappaFx Normal force breakpoints, FzFx Longitudinal force map, FxMap |
Rolling Resistance — Выберите типNone (значение по умолчанию) | Pressure and velocity | ISO 28580 | Magic Formula | Mapped torqueЧтобы вычислить крутящий момент сопротивления качению, задайте один из этих параметров Rolling Resistance.
| Установка | Блокируйте реализацию |
|---|---|
| 'none' |
| Метод в Пошаговой Методологии Coastdown для Измерения Сопротивления качению Шины. Сопротивление качению является функцией давления воздуха в шине, нормальной силы и скорости. |
| Метод задан в ISO 28580:2018, Легковом автомобиле, методе измерения сопротивления качению шины по производству грузовых автомобилей и автобусов — Один тест точки и корреляция результатов измерения. |
| Волшебные уравнения формулы от 4. E70 в Шине и Динамике аппарата. Волшебная формула является эмпирическим уравнением на основе подходящих коэффициентов. |
| Интерполяционная таблица, которая является функцией нормальной силы и оси вращения продольная скорость. |
| Выбор | Параметры |
|---|---|
| Velocity independent force coefficient, aMy Linear velocity force component, bMy Quadratic velocity force component, cMy Tire pressure exponent, alphaMy Normal force exponent, betaMy |
| Parasitic losses force, Fpl Rolling resistance constant, Cr Thermal correction factor, Kt Measured temperature, Tmeas Parasitic losses force, Fpl Ambient temperature, Tamb |
| Rolling resistance torque coefficient, QSY Longitudinal force rolling resistance coefficient, QSY2 Linear rotational speed rolling resistance coefficient, QSY3 Quartic rotational speed rolling resistance coefficient, QSY4 Camber squared rolling resistance torque, QSY5 Load based camber squared rolling resistance torque, QSY6 Normal load rolling resistance coefficient, QSY7 Pressure load rolling resistance coefficient, QSY8 Rolling resistance scaling factor, lam_My |
| Spin axis velocity breakpoints, VxMy Normal force breakpoints, FzMy Rolling resistance torque map, MyMap |
Brake Type — Выберите типNone | Disc | Drum | MappedСуществует четыре типа блоков Longitudinal Wheel. Каждый блок реализует различный тип тормоза.
| Имя блока | Тормозите установку типа | Тормозите реализацию |
|---|---|---|
| Longitudinal Wheel - No Brake |
|
'none' |
| Longitudinal Wheel - Disc Brake |
|
Тормоз, который преобразует давление в тормозном цилиндре в тормозное усилие. |
| Longitudinal Wheel - Drum Brake |
|
Симплексный барабанный тормоз, который преобразует приложенную силу и геометрию тормоза в сетевой тормозной момент. |
| Longitudinal Wheel - Mapped Brake |
|
Интерполяционная таблица, которая является функцией скорости колеса и примененного тормозного давления. |
Vertical Motion — Выберите типNone (значение по умолчанию) | Mapped stiffness and dampingЧтобы вычислить вертикальное движение, задайте один из этих параметров Vertical Motion.
| Установка | Блокируйте реализацию |
|---|---|
| Блок передает прикладывавшие силы шасси непосредственно до сопротивления качению и продольных вычислений силы. |
| Вертикальное движение зависит от жесткости колеса и затухания. Жесткость является функцией смещения боковой стены шины и давления. Затухание является функцией скорости боковой стены шины и давления. |
| Выбор | Включает эти параметры | Создает эти выходные порты |
|---|---|---|
| Wheel and unsprung mass, m Initial deflection, zo Initial velocity, zdoto Gravitational acceleration, g Vertical deflection breakpoints, zFz Pressure breakpoints, pFz Force due to deflection, Fzz Vertical velocity breakpoints, zdotFz Force due to velocity, Fzzdot Ground displacement, Gndz Input ground displacement |
|
Longitudinal scaling factor, lam_x — Масштабный коэффициент тренияПродольный масштабный коэффициент трения, безразмерный.
Чтобы включить этот параметр, очистите Input friction scale factor.
Input friction scale factor — ВыборOff (значение по умолчанию)Создайте входной порт для продольного масштабного коэффициента трения.
Выбор этого параметра:
Создает входной порт lam_mux.
Отключает параметр Longitudinal scaling factor, lam_x.
Axle viscous damping coefficient, br — ЗатуханиеscalarОсь вязкий коэффициент затухания, br, в N · m·.
Wheel inertia, Iyy — ИнерцияscalarИнерция колеса, в kg · м^2.
Wheel initial angular velocity, omegao — Скорость колесаscalarНачальная скорость вращения колеса, вдоль зафиксированной телом оси Y, в rad/s.
Relaxation length, Lrel — Релаксационная длинаscalarПродолжительность релаксации колеса, в m.
Loaded radius, Re — Загруженный радиусscalarЗагруженный радиус колеса, Re, в m.
Unloaded radius, UNLOADED_RADIUS — Разгруженный радиусscalarРазгруженный радиус колеса, в m.
Чтобы создать этот параметр, установите Rolling Resistance на Pressure and velocity или Magic Formula.
Nominal longitudinal speed, LONGVL — СкоростьscalarНоминальная продольная скорость вдоль зафиксированной телом оси X, в m/s.
Чтобы включить этот параметр, установите Longitudinal Force на Magic Formula pure longitudinal slip.
Nominal camber angle, gamma — ИзгибscalarНоминальный угол изгиба, в рад.
Чтобы включить этот параметр, установите также:
Longitudinal Force к Magic Formula pure longitudinal slip.
Rolling Resistance к Magic Formula.
Nominal pressure, NOMPRES — ДавлениеscalarНоминальное давление, в Па.
Чтобы включить этот параметр, установите также:
Longitudinal Force к Magic Formula pure longitudinal slip.
Rolling Resistance к Magic Formula.
Pressure, press — ДавлениеscalarДавление, в Па.
Включить этот параметр:
Установите один из них:
Longitudinal Force к Magic Formula pure longitudinal slip.
Rolling Resistance к Pressure and velocity или Magic Formula.
Vertical Motion к Mapped stiffness and damping.
На панели Wheel Dynamics очистите Input tire pressure.
Pure longitudinal peak factor, Dx факторscalarЧистый продольный пиковый фактор, безразмерный.
Коэффициенты основаны на эмпирических данных о шине. Эти значения являются типичными наборами постоянных Волшебных коэффициентов Формулы для общих дорожных условий.
| Поверхность | B | C | D | E |
|---|---|---|---|---|
| Сухое гудронированное шоссе | 10 | 1.9 | 1 | 0.97 |
| Влажное гудронированное шоссе | 12 | 2.3 | 0.82 | 1 |
| Снег | 5 | 2 | 0.3 | 1 |
| Лед | 4 | 2 | 0.1 | 1 |
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula constant value.
Pure longitudinal shape factor, Cx факторscalarЧистый продольный масштабный фактор, безразмерный.
Коэффициенты основаны на эмпирических данных о шине. Эти значения являются типичными наборами постоянных Волшебных коэффициентов Формулы для общих дорожных условий.
| Поверхность | B | C | D | E |
|---|---|---|---|---|
| Сухое гудронированное шоссе | 10 | 1.9 | 1 | 0.97 |
| Влажное гудронированное шоссе | 12 | 2.3 | 0.82 | 1 |
| Снег | 5 | 2 | 0.3 | 1 |
| Лед | 4 | 2 | 0.1 | 1 |
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula constant value.
Pure longitudinal stiffness factor, Bx факторscalarЧистый продольный фактор жесткости, безразмерный.
Коэффициенты основаны на эмпирических данных о шине. Эти значения являются типичными наборами постоянных Волшебных коэффициентов Формулы для общих дорожных условий.
| Поверхность | B | C | D | E |
|---|---|---|---|---|
| Сухое гудронированное шоссе | 10 | 1.9 | 1 | 0.97 |
| Влажное гудронированное шоссе | 12 | 2.3 | 0.82 | 1 |
| Снег | 5 | 2 | 0.3 | 1 |
| Лед | 4 | 2 | 0.1 | 1 |
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula constant value.
Pure longitudinal curvature factor, Ex факторscalarЧистый продольный фактор искривления, безразмерный.
Коэффициенты основаны на эмпирических данных о шине. Эти значения являются типичными наборами постоянных Волшебных коэффициентов Формулы для общих дорожных условий.
| Поверхность | B | C | D | E |
|---|---|---|---|---|
| Сухое гудронированное шоссе | 10 | 1.9 | 1 | 0.97 |
| Влажное гудронированное шоссе | 12 | 2.3 | 0.82 | 1 |
| Снег | 5 | 2 | 0.3 | 1 |
| Лед | 4 | 2 | 0.1 | 1 |
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula constant value.
Cfx shape factor, PCX1 факторscalarМасштабный фактор Cfx, PCX1, безразмерный.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Longitudinal friction at nominal normal load, PDX1 факторscalarПродольное трение при номинальной нормальной загрузке, PDX1, безразмерном.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Frictional variation with load, PDX2 факторscalarФрикционное изменение с загрузкой, PDX2, безразмерным.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Frictional variation with camber, PDX3 факторscalarФрикционное изменение с изгибом, PDX3, 1/rad^2.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Longitudinal curvature at nominal normal load, PEX1 факторscalarПродольное искривление при номинальной нормальной загрузке, PEX1, безразмерном.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Variation of curvature factor with load, PEX2 факторscalarИзменение фактора искривления с загрузкой, PEX2, безразмерным.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Variation of curvature factor with square of load, PEX3 факторscalarИзменение фактора искривления с квадратом загрузки, PEX3, безразмерного.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Longitudinal curvature factor with slip, PEX4 факторscalarПродольный фактор искривления с промахом, PEX4, безразмерным.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Longitudinal slip stiffness at nominal normal load, PKX1 факторscalarПродольная жесткость промаха при номинальной нормальной загрузке, PKX1, безразмерном.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Variation of slip stiffness with load, PKX2 факторscalarИзменение жесткости промаха с загрузкой, PKX2, безразмерным.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Slip stiffness exponent factor, PKX3 факторscalarПодсуньте фактор экспоненты жесткости, PKX3, безразмерный.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Horizontal shift in slip ratio at nominal normal load, PHX1 факторscalarГоризонталь переключает отношение промаха на нижний регистр при номинальной нормальной загрузке, PHX1, безразмерном.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Variation of horizontal slip ratio with load, PHX2 факторscalarИзменение горизонтального отношения промаха с загрузкой, PHX2, безразмерным.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Vertical shift in load at nominal normal load, PVX1 факторscalarВертикальный сдвиг в загрузке при номинальной нормальной загрузке, PVX1, безразмерном.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Variation of vertical shift with load, PVX2 факторscalarИзменение вертикального сдвига с загрузкой, PVX2, безразмерным.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Linear variation of longitudinal slip stiffness with tire pressure, PPX1 факторscalarЛинейное изменение продольной жесткости промаха с давлением воздуха в шине, PPX1, безразмерным.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Quadratic variation of longitudinal slip stiffness with tire pressure, PPX2 факторscalarКвадратичное изменение продольной жесткости промаха с давлением воздуха в шине, PPX2, безразмерным.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Linear variation of peak longitudinal friction with tire pressure, PPX3 факторscalarЛинейное изменение пикового продольного трения с давлением воздуха в шине, PPX3, безразмерным.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Quadratic variation of peak longitudinal friction with tire pressure, PPX4 факторscalarКвадратичное изменение пикового продольного трения с давлением воздуха в шине, PPX4, безразмерным.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Slip speed decay function scaling factor, lam_muV факторscalarПодсуньте затуханию скорости функциональный масштабный коэффициент, lam_muV, безразмерный.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Brake slip stiffness scaling factor, lam_Kxkappa факторscalarТормозите масштабный коэффициент жесткости промаха, lam_Kxkappa, безразмерный.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Longitudinal shape scaling factor, lam_Cx факторscalarПродольный масштабный коэффициент формы, lam_Cx, безразмерный.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Longitudinal curvature scaling factor, lam_Ex факторscalarПродольный масштабный коэффициент искривления, lam_Ex, безразмерный.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Longitudinal horizontal shift scaling factor, lam_Hx факторscalarПродольный горизонтальный масштабный коэффициент сдвига, lam_Hx, безразмерный.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Longitudinal vertical shift scaling factor, lam_Vx факторscalarПродольный вертикальный масштабный коэффициент сдвига, lam_Vx, безразмерный.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Magic Formula pure longitudinal slip.
Slip ratio breakpoints, kappaFx — Точки остановаvectorПодсуньте точки останова отношения, безразмерные.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Mapped force.
Normal force breakpoints, FzFx — Точки остановаvectorНормальные точки останова силы, N.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Mapped force.
Longitudinal force map, FxMap — Интерполяционная таблицаarrayПродольная сила по сравнению с отношением промаха и нормальная сила, N.
Чтобы создать этот параметр, выберите параметр Longitudinal Force Mapped force.
Velocity independent force coefficient, aMy — Обеспечьте коэффициентscalarНезависимый от скорости коэффициент силы, a, в s/m.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Pressure and velocity.
Linear velocity force component, bMy — Компонент силыscalarЛинейный скоростной компонент силы, b, в s/m.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Pressure and velocity.
Quadratic velocity force component, cMy — Компонент силыscalarКвадратичный скоростной компонент силы, c, в s^2/m^2.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Pressure and velocity.
Tire pressure exponent, alphaMy — Экспонента давленияscalarЭкспонента давления воздуха в шине, ɑ, безразмерный.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Pressure and velocity.
Normal force exponent, betaMy — Обеспечьте экспонентуscalarНормальная экспонента силы, β, безразмерный.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Pressure and velocity.
Parasitic losses force, Fpl — Обеспечьте потерюscalarПаразитная потеря силы, Fpl, в N.
Чтобы создать этот параметр, выберите параметр Rolling Resistance ISO 28580.
Rolling resistance constant, Cr — ПостоянныйscalarПостоянное сопротивление качению, Cr, в N/kN. ISO 28580 задает модуль сопротивления качению как один ньютон тягового сопротивления для каждого килоньютоны нормальной загрузки.
Чтобы создать этот параметр, выберите параметр Rolling Resistance ISO 28580.
Thermal correction factor, Kt — Поправочный коэффициентscalarТепловой поправочный коэффициент, Kt, в 1/degC.
Чтобы создать этот параметр, выберите параметр Rolling Resistance ISO 28580.
Measured temperature, Tmeas — ТемператураscalarИзмеренная температура, Tmeas, в K.
Чтобы создать этот параметр, выберите параметр Rolling Resistance ISO 28580.
Ambient temperature, Tamb — ТемператураscalarИзмеренная температура, Tamb, в K.
Чтобы создать этот параметр, выберите параметр Rolling Resistance ISO 28580.
Input ambient temperature — ВыборscalarВыберите, чтобы создать входной порт Tamb.
Чтобы создать этот параметр, выберите параметр Rolling Resistance ISO 28580.
Rolling resistance torque coefficient, QSY1 — Закрутите коэффициентscalarКоэффициент крутящего момента сопротивления качению, безразмерный.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Magic Formula.
Longitudinal force rolling resistance coefficient, QSY2 — Обеспечьте коэффициент сопротивленияscalarПродольный коэффициент сопротивления качению силы, безразмерный.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Magic Formula.
Linear rotational speed rolling resistance coefficient, QSY3 — Линейный коэффициент скоростиscalarЛинейный коэффициент сопротивления качению скорости вращения, безразмерный.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Magic Formula.
Quartic rotational speed rolling resistance coefficient, QSY4 — Биквадратный коэффициент скоростиscalarБиквадратный коэффициент сопротивления качению скорости вращения, безразмерный.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Magic Formula.
Camber squared rolling resistance torque, QSY5 — Крутящий момент сопротивления изгибаscalarИзгиб придал крутящему моменту сопротивления качению квадратную форму в 1/rad^2.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Magic Formula.
Load based camber squared rolling resistance torque, QSY6 — Крутящий момент нагрузочного сопротивленияscalarОснованный на загрузке изгиб придал крутящему моменту сопротивления качению квадратную форму в 1/rad^2.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Magic Formula.
Normal load rolling resistance coefficient, QSY7 — Нормальный коэффициент сопротивленияscalarНормальный коэффициент сопротивления качению загрузки, безразмерный.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Magic Formula.
Pressure load rolling resistance coefficient, QSY8 — Коэффициент сопротивления давленияscalarКоэффициент сопротивления качению загрузки давления, безразмерный.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Magic Formula.
Rolling resistance scaling factor, lam_My шкалаscalarМасштабный коэффициент сопротивления качению, безразмерный.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Magic Formula.
Spin axis velocity breakpoints, VxMy — Точки остановаvectorТочки останова оси вращения скорости, в m/s.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Mapped torque.
Normal force breakpoints, FzMy — Точки остановаvectorНормальные точки останова силы, в N.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Mapped torque.
Rolling resistance torque map, MyMap — Интерполяционная таблицаscalarКрутящий момент сопротивления качению по сравнению со скоростью оси и нормальной силой, в N · m.
Чтобы создать этот параметр, выберите параметр Rolling Resistance Mapped torque.
Static friction coefficient, mu_static — Статическое трениеscalarСтатический коэффициент трения, безразмерный.
Чтобы включить этот параметр, для параметра Brake Type, задают один из этих типов:
Disc
Drum
Mapped
Kinetic friction coefficient, mu_kinetic — Кинетическое трениеscalarКинематический коэффициент трения, безразмерный.
Чтобы включить этот параметр, для параметра Brake Type, задают один из этих типов:
Disc
Drum
Mapped
Disc brake actuator bore, disc_abore — Расстояние скукиscalarПривод дискового тормоза перенес в m.
Чтобы включить параметры дискового тормоза, выберите Disc для параметра Brake Type.
Brake pad mean radius, Rm — РадиусscalarСредний радиус тормозной колодки, в m.
Чтобы включить параметры дискового тормоза, выберите Disc для параметра Brake Type.
Number of brake pads, num_pads количествоscalarКоличество тормозных колодок.
Чтобы включить параметры дискового тормоза, выберите Disc для параметра Brake Type.
Drum brake actuator bore, disc_abore — Расстояние скукиscalarПривод барабанного тормоза перенес в m.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Shoe pin to drum center distance, drum_a — РасстояниеscalarКонтакт обуви, чтобы барабанить расстояние между центрами, в m.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Shoe pin center to force application point distance, drum_c — РасстояниеscalarКонтакт обуви центрируется, чтобы обеспечить расстояние точки приложения в m.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Drum internal radius, drum_r — РадиусscalarБарабан внутренний радиус, в m.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Shoe pin to pad start angle, drum_theta1 \anglescalarКонтакт обуви, чтобы заполнить запускает угол в градусе.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Shoe pin to pad end angle, drum_theta2 \anglescalarКонтакт обуви, чтобы заполнить угол конца, в градусе.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Brake actuator pressure breakpoints, brake_p_bpt — Точки остановаvectorТормозите точки останова давления привода в панели.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра Brake Type.
Wheel speed breakpoints, brake_n_bpt — Точки остановаvectorТочки останова скорости колеса, в об/мин.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра Brake Type.
Brake torque map, f_brake_t — Интерполяционная таблицаarrayИнтерполяционная таблица для момента привода, , функция прикладного тормозного давления и скорости колеса, где:
T является моментом привода в N · m.
P является примененным тормозным давлением в панели.
N является скоростью колеса в об/мин.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра Brake Type.
Nominal normal force, FNOMIN СилаscalarНоминал оценил загрузку колеса вдоль зафиксированной колесом оси z в N.
Чтобы включить этот параметр, установите также:
Longitudinal Force к Magic Formula pure longitudinal slip.
Rolling Resistance к Magic Formula.
Nominal rated load scaling factor, lam_Fzo факторscalarНоминал оцененный масштабный коэффициент загрузки, безразмерный. Используемый, чтобы масштабировать нормальное для определенных приложений и условий загрузки.
Чтобы включить этот параметр, установите Longitudinal Force на Magic Formula pure longitudinal slip.
Wheel and unsprung mass, m — МассаscalarКолесо и неперепрыгиваемая масса, в kg. Используемый в вертикальных вычислениях движения.
Чтобы включить этот параметр, установите Vertical Motion на Mapped stiffness and damping.
Initial deflection, zo — ОтклонениеscalarНачальное смещение оси вдоль зафиксированной колесом оси z, в m.
Чтобы включить этот параметр, установите Vertical Motion на Mapped stiffness and damping.
Initial velocity, zdoto — СкоростьscalarНачальная скорость оси вдоль зафиксированной колесом оси z, в m.
Чтобы включить этот параметр, установите Vertical Motion на Mapped stiffness and damping.
Gravitational acceleration, g — Сила тяжестиscalarГравитационное ускорение, в м/с^2.
Чтобы включить этот параметр, установите Vertical Motion на Mapped stiffness and damping.
Ground displacement, Gndz — СмещениеscalarОснуйте смещение, Grndz, вдоль отрицательной зафиксированной колесом оси z, в m.
Чтобы включить этот параметр, установите Vertical Motion на Mapped stiffness and damping.
Vertical deflection breakpoints, zFz — Точки остановаvectorВектор точек останова отклонения боковой стены, соответствующих таблице силы, в m.
Чтобы включить этот параметр, установите Vertical Motion на Mapped stiffness and damping.
Pressure breakpoints, pFz — Точки остановаvectorВектор точек данных давления, соответствующих таблице силы, в Па.
Чтобы включить этот параметр, установите Vertical Motion на Mapped stiffness and damping.
Force due to deflection, Fzz СилаvectorОбеспечьте из-за отклонения боковой стены и давления вдоль зафиксированной колесом оси z в N.
Чтобы включить этот параметр, установите Vertical Motion на Mapped stiffness and damping.
Vertical velocity breakpoints, zdotFz — Точки остановаscalarВектор точек останова боковой стены скорости, соответствующих силе из-за скоростной таблицы, в m.
Чтобы включить этот параметр, установите Vertical Motion на Mapped stiffness and damping.
Force due to velocity, Fzzdot СилаscalarОбеспечьте из-за скорости боковой стены и давления вдоль зафиксированной колесом оси z в N.
Чтобы включить этот параметр, установите Vertical Motion на Mapped stiffness and damping.
Minimum normal force, FZMIN СилаscalarМинимальная нормальная сила, в N. Используемый со всеми вертикальными вычислениями силы.
Maximum normal force, FZMAX СилаscalarМаксимальная нормальная сила, в N. Используемый со всеми вертикальными вычислениями силы.
Max allowable slip ratio (absolute), kappamax — ОтношениеscalarМаксимальное допустимое абсолютное отношение промаха, безразмерное.
Velocity tolerance used to handle low velocity situations, VXLOW ДопускscalarСкоростной допуск раньше обрабатывал ситуации низкой скорости в m/s.
Minimum ambient temperature, TMIN — TminscalarМинимальная температура окружающей среды, TMIN, в K.
Чтобы создать этот параметр, выберите параметр Rolling Resistance ISO 28580.
Maximum ambient temperature, TMAX — TmaxscalarМаксимальная температура окружающей среды, TMAX, в K.
Чтобы создать этот параметр, выберите параметр Rolling Resistance ISO 28580.
[1] Магистральный комитет по шине. Пошаговая методология Coastdown для измерения сопротивления качению шины. Стандартный J2452_199906. Варрендэйл, PA: SAE International, июнь 1999.
[2] Pacejka, Х. Б. Тайр и Динамика аппарата. 3-й редактор Оксфорд, Соединенное Королевство: SAE и Баттерворт-Хейнеманн, 2012.
[3] Шмид, Стивен Р., Бернард Дж. Хэмрок и Филиал О. Джейкобсон. "Глава 18: Тормоза и Муфты". Основные принципы Элементов Машины, Версии SI. 3-й редактор Бока-Ратон, FL: Нажатие CRC, 2014.
[4] Shigley, Джозеф Э. и Ларри Мичель. Проект Машиностроения. 4-й редактор Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1983.
[5] ISO 28580:2018. Легковой автомобиль, метод измерения сопротивления качению шины по производству грузовых автомобилей и автобусов - Один тест точки и корреляция результатов измерения. ISO (Международная организация по стандартизации), 2018.