Гибридный электромобиль (HEV) пример готовых узлов P0 представляет полную модель HEV с двигателем внутреннего сгорания, передачей, батареей, двигателем и сопоставленными алгоритмами управления трансмиссии. Используйте пример готовых узлов в оборудовании в цикле (HIL) тестирование, сравнительный анализ, и управляйте оптимизацией параметров управления гибрида HEV P0. Чтобы создать и открыть рабочую копию проекта примера готовых узлов, войти
По умолчанию пример готовых узлов HEV P0 сконфигурирован с:Пакет литий-ионного аккумулятора
Сопоставленный электродвигатель
Сопоставленный двигатель с искровым зажиганием
Эта схема показывает настройку трансмиссии.

Эта таблица описывает блоки и подсистемы в примере готовых узлов, указывая, какие подсистемы содержат варианты. Чтобы реализовать варианты модели, пример готовых узлов использует различные подсистемы.
| Элемент примера готовых узлов | Описание | Варианты |
|---|---|---|
Анализируйте степень и энергию |
Дважды кликните Analyze Power and Energy, чтобы открыть live скрипт. Запустите скрипт, чтобы оценить и сообщить о степени и потреблении энергии в компоненте - и уровень системы. Для получения дополнительной информации о live скрипте, смотрите, Анализируют Степень и энергию. | Нет данных |
Блок Drive Cycle Source — FTP75 (2 474 секунды) | Генерирует стандартную или заданную пользователями скорость цикла диска по сравнению с профилем времени. Блок выход является выбранным или заданным транспортным средством продольная скорость. | |
Environment подсистема | Создает переменные окружения, включая дорожный класс, скорость ветра, и атмосферную температуру и давление. | |
Longitudinal Driver подсистема |
Использует вариант Longitudinal Driver или Open Loop, чтобы сгенерировать нормированное ускорение и тормозящие команды.
| ✓ |
Controllers подсистема | Реализует управляющий модуль трансмиссии (PCM), содержащий гибридный управляющий модуль (HCM) P0, модуль управления двигателем (ECM) и управляющий модуль передачи (TCM). | ✓ |
Passenger Car подсистема | Реализует гибридный легковой автомобиль, который содержит ходовую часть, электрический объект и подсистемы двигателей. | ✓ |
Visualization подсистема | Производительность уровня транспортного средства отображений, состояние заряда (SOC) батареи, экономия топлива и результаты эмиссии, которые полезны для соответствия трансмиссии и анализа выбора компонента. |
Дважды кликните Analyze Power and Energy, чтобы открыть live скрипт. Запустите скрипт, чтобы оценить и сообщить о степени и потреблении энергии в компоненте - и уровень системы. Для получения дополнительной информации о live скрипте, смотрите, Анализируют Степень и энергию.
Скрипт обеспечивает:
Полные энергетические сводные данные, которые можно экспортировать в электронную таблицу Excel®.
Завод по производству двигателей, электрический объект и КПД объекта ходовой части, включая гистограмму механизма времени потрачены в различных КПД завода по производству двигателей.
Регистрация данных так, чтобы можно было использовать Инспектора Данных моделирования, чтобы анализировать КПД трансмиссии и энергетические сигналы передачи.
Для получения дополнительной информации о live скрипте, смотрите, Анализируют Степень и энергию.
Drive Cycle Source блок генерирует целевую скорость транспортного средства для выбранного или заданного цикла диска. Пример готовых узлов имеет эти опции.
| Синхронизация | Вариант | Описание |
|---|---|---|
Выведите шаг расчета |
| Непрерывные команды оператора |
| Дискретные команды оператора |
Longitudinal Driver подсистема генерирует нормированное ускорение и тормозящие команды. Пример готовых узлов имеет эти варианты.
Блокируйте варианты | Описание | ||
|---|---|---|---|
Продольный драйвер (значение по умолчанию) | Управление |
| Управление PI с отслеживанием завершения и усилений feedforward, которые являются функцией скорости транспортного средства. |
| Оптимальный предварительный просмотр одно точки (предусматривает) управление. | ||
| Управление пропорциональным интегралом (PI) с отслеживанием завершения и усилений feedforward. | ||
Фильтр lowpass (LPF) |
| Используйте LPF при целевой ошибке скорости для более сглаженного управления. | |
| Не используйте фильтр при ошибке скорости. | ||
Сдвиг |
| Модели графика Stateflow®, противоположные, нейтральные, и планирование переключения передач диска. | |
| Введите механизм, состояние транспортного средства, и скоростная обратная связь генерирует ускорение и тормозящие команды, чтобы отследить вперед и инвертировать движение транспортного средства. | ||
| Никакая передача. | ||
| Модели диаграммы Stateflow, противоположные, нейтральные, парк и планирование переключения передач N-скорости. | ||
Разомкнутый цикл | Подсистема регулирования без обратной связи. В подсистеме можно сконфигурировать ускорение, замедление, механизм, и сжать команды с постоянными или основанными на сигнале входными параметрами. | ||
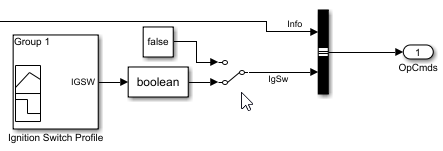
Чтобы бездействовать механизм в начале цикла диска и симулировать свет катализатора - прочь прежде, чем переместить транспортное средство с командой педали, используйте вариант Longitudinal Driver. Продольная подсистема Драйвера включает профиль сигнала замка зажигания, IgSw. Диспетчер механизма использует сигнал замка зажигания запустить и двигатель и свет катализатора - от таймера.
Свет катализатора - от таймера заменяет управление функцией остановки механизма запускается остановка (ESS), в то время как свет катализатора - от таймера подсчитывает. Во время симуляции, после IgSw время вниз-ребра достигает света катализатора - от времени CatLightOffTime, нормальные резюме операции ESS. Если нет никакой команды крутящего момента, прежде чем симуляция достигнет EngStopTime, ESS закрывает механизм.
Управлять ESS и светом катализатора - прочь:
В Продольной Подсистеме модели Драйвера, набор профиль замка зажигания IgSw к 'on'.
В рабочей области моделей контроллеров механизма, установленной эти калибровочные параметры:
EngStopStartEnable — Включает ESS. Чтобы отключить ESS, установите значение ко лжи.
CatLightOffTime — Время простоя Engine от механизма запускается к свету катализатора - прочь.
EngStopTime — Время выполнения механизма ESS после сокращения запроса крутящего момента модели драйвера.
Controller подсистема имеет PCM, содержащий ECM, HCM и TCM. У контроллера есть эти варианты.
| Контроллер | Вариант | Описание | |
|---|---|---|---|
| ECM | SiEngineController (значение по умолчанию) | Контроллер двигателя с искровым зажиганием | |
CiEngineController | Контроллер механизма CI | ||
| HCM |
| Реализует эквивалентную стратегию минимизации потребления (ECMS) 2, который минимизирует потребление энергии при поддержании состояния заряда (SOC) батареи. Реализации или адаптивный или неадаптивный ECMS.
| |
HCM реализует динамический контрольный контроллер, который определяет крутящий момент механизма, моторный крутящий момент, начинающего, муфту и команды тормозного давления. А именно, HCM:
Преобразует сигнал педали акселератора драйвера в запрос крутящего момента колеса. Чтобы вычислить общий крутящий момент трансмиссии в колесах, алгоритм использует максимальный крутящий момент механизма и моторные кривые крутящего момента и отношения дифференциала и передачу.
Преобразует сигнал педали тормоза драйвера в запрос тормозного давления. Алгоритм умножает сигнал педали тормоза на максимальное тормозное давление.
Реализует регенеративный алгоритм торможения для тягового мотора, чтобы восстановить максимальную сумму кинетической энергии от транспортного средства.
HCM реализует ECMS algorithm2, который оптимизирует разделение крутящего момента между механизмом и двигателем, чтобы минимизировать потребление энергии при поддержании состояния заряда (SOC) батареи. А именно, ECMS:
Присваивает стоимость для электроэнергии, так, чтобы использование сохраненной электроэнергии было равно расходованию топливной энергии.
| Режим работы от аккумулятора | Эквивалентная электроэнергия | Описание |
|---|---|---|
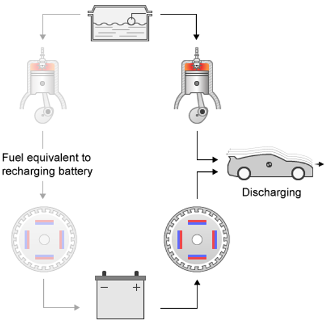
Разряд | Положительный | Батарея разряжает сохраненную электроэнергию, когда электрическая машина используется.
|
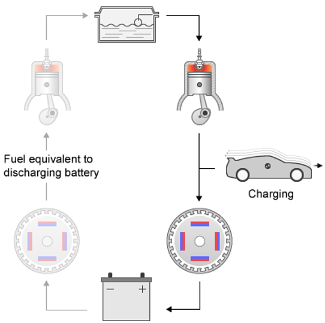
Зарядка | Отрицательный | Батарея аккумулирует электроэнергию от любого:
|
Мгновенный метод минимизации, который программное обеспечение решает на каждом временном шаге контроллера. Это может обеспечить близкое оптимальное управление для известного цикла диска. Реализовывать стратегию на каждом временном шаге контроллера, ECMS:
Создает вектор крутящего момента управления команды крутящего момента драйвера и полной моторной области значений крутящего момента.
Привод проверок и ограничения батареи. Определяет, неосуществимы ли какие-либо элементы в векторе крутящего момента управления.
Вычисляет и минимизирует эквивалентное потребление с помощью этих уравнений.
Реализации или адаптивный или неадаптивный метод ECMS. Архитектура HEV является поддержкой заряда, означая батарею, SOC должен остаться в заданной области, потому что нет никакой сменной возможности перезарядить батарею. Батарея является энергетическим буфером, и вся энергия прибывает из топлива, если изменение в SOC минимизировано по циклу диска. Чтобы заряжаться выдерживают по заданному циклу диска, пример готовых узлов реализует любой из этих методов ECMS.
| Метод ECMS | Описание |
|---|---|
Неадаптивный ECMS (значение по умолчанию) | Пример готовых узлов использует постоянный эквивалентный фактор.
|
Адаптивный ECMS | Пример готовых узлов настраивает эквивалентный фактор с выходом ПИ-контроллера.
|
Уравнения используют эти переменные.
P | Эквивалентное потребление |
Pfuel | Мощность двигателя на основе топливного потока |
s | Фактор эквивалентности ECMS |
penalty | Мультипликативный штраф, чтобы помочь с поддержкой заряда |
a | Мультипликативная функция формы штрафа |
Pelectrical | Электроэнергия от напряжения батареи и текущий |
Pconstraint | Ограничительный штраф стоится |
Peng_power_change | Изменение уровня мощности двигателя стоится |
SOCtarget, SOCmax, SOCmin | Предназначайтесь для SOC, максимального SOC и минимального SOC, соответственно |
TrqCmd | Закрутите команду |
MinMotTrq, MaxMotTrq | Минимальный моторный крутящий момент и максимальный моторный крутящий момент, соответственно |
| τactuator, τactuatormin, τactuatormax | Ограничение привода, минимальное ограничение привода и максимальное ограничение привода, соответственно |
| Pbatt, Pbattcharge, Pbattdischarge | Ограничение питания от батареи, ограничение выполнения питания от батареи и питание от батареи заряжают ограничение, соответственно |
| Ibatt, Ibattcharge, Ibattdischarge | Батарея текущее ограничение, батарея текущее ограничение выброса и батарея текущее ограничение заряда, соответственно |
Реализовывать легковой автомобиль, Passenger Car подсистема содержит ходовую часть, электрический объект и подсистемы двигателей. Чтобы создать ваши собственные варианты механизма для примера готовых узлов, используйте CI и шаблоны проекта двигателя с искровым зажиганием. Пример готовых узлов имеет эти варианты.
| Подсистема ходовой части | Вариант | Описание | |
|---|---|---|---|
Дифференциал и податливость | All Wheel Drive | Сконфигурируйте ходовую часть для всего колеса, переднего колеса или заднего привода. Для полноприводного варианта можно сконфигурировать тип связывающегося крутящего момента. | |
Front Wheel Drive (значение по умолчанию) | |||
Rear Wheel Drive | |||
Автоматическая коробка передач гидротрансформатора | Ideal Fixed Gear Transmission | Сконфигурируйте заблокированный и разблокированный КПД передачи или с 1D или с 4D интерполяционная таблица (по умолчанию). | |
Torque Converter | Сконфигурируйте для внешнего, внутреннего (значение по умолчанию) или никакой тупик. | ||
Транспортное средство | Vehicle Body 1 DOF Longitudinal | Сконфигурированный для 1 степени свободы | |
Колеса и тормоза |
| Для колес можно сконфигурировать тип:
Для производительности и ясности, чтобы определить продольную силу каждого колеса, варианты реализуют блок Longitudinal Wheel. Чтобы определить общую продольную силу всех колес, действующих на ось, варианты используют масштабный коэффициент, чтобы умножить силу одного колеса количеством колес на оси. При помощи этого подхода, чтобы вычислить общую силу, варианты принимают равный промах шины и загружающий в передних и задних осях, который характерен для продольных исследований трансмиссии. Если дело обстоит не так, например, когда трение или загрузки расходятся в левых и правых сторонах осей, уникальные Продольные блоки Колеса использования, чтобы вычислить независимые силы. Однако использование уникальных блоков, чтобы смоделировать каждое колесо увеличивает сложность модели и вычислительную стоимость. | |
| |||
| Электрическая подсистема объекта | Вариант | Описание |
|---|---|---|
Батарея | BattHevP0 | Сконфигурированный с литий-ионным аккумулятором |
Электрическая машина | MotMapped | Сопоставленный двигатель с неявным контроллером |
| Подсистемы двигателей | Вариант | Описание | |
|---|---|---|---|
| Механизм |
| Динамический двигатель с искровым зажиганием с турбокомпрессором | |
| Сопоставленный двигатель с искровым зажиганием с неявным турбокомпрессором | ||
| Глубокое обучение двигатель с искровым зажиганием | ||
| Динамический механизм CI с турбокомпрессором | ||
| Сопоставленный механизм CI с неявным турбокомпрессором | ||
MathWorks® хотел бы подтвердить вклад доктора Симоны Онори к алгоритму оптимального управления ECMS, реализованному в этом примере готовых узлов. Доктор Онори является профессором Разработки Энергетических ресурсов в Стэнфордском университете. Ее исследовательские интересы включают электрохимическое моделирование, оценку и оптимизацию устройств аккумулирования энергии для автомобильного и приложений уровня сетки, гибридных автомобилей и моделирования электромобилей и управления, моделирования УЧП, и сокращения порядка модели и оценки систем смягчения эмиссии. Она - старший член IEEE®.
[1] Balazs, A., Morra, E. и Pischinger, S., оптимизация наэлектризованных трансмиссий для городских автомобилей. Технический документ 2011-01-2451 SAE. Варрендэйл, PA: международный журнал SAE альтернативных трансмиссий, 2012.
[2] Onori, S., Serrao, L. и Rizzoni, G., гибридные системы управления энергопотреблением электромобилями. Нью-Йорк: Спрингер, 2016.
CI Controller | Drive Cycle Source | Interior PM Controller | Interior PMSM | Longitudinal Driver | Mapped CI Engine | Mapped SI Engine | SI Controller