Когда вы настраиваете систему управления с помощью systune или Control System Tuner, необходимо подтвердить результаты настройки. Настраивающиеся результаты обеспечивают числовые и графические признаки относительно того, как хорошо вашим настраивающим целям удовлетворяют. (См., Интерпретируют Числовые Настраивающие Результаты и Визуализируют Настраивающиеся Цели.) Часто, вы хотите исследовать другие отклики системы с помощью настроенных параметров контроллера. Если вы настраиваете модель Simulink®, необходимо также подтвердить настроенный контроллер против полной нелинейной системы. В командной строке и в Control System Tuner, существует несколько инструментов, чтобы помочь вам подтвердить настроенную систему управления.
В дополнение к откликам системы, соответствующим вашим настраивающим целям (см., Визуализируют Настраивающиеся Цели), можно оценить настроенную производительность системы путем графического вывода других откликов системы. Например, оцените отслеживание уставки или производительность перерегулирования путем графического вывода переходного процесса передаточной функции от ссылочного входа до управляемого выхода. Или, оцените запасы устойчивости путем исследования передаточной функции разомкнутого цикла. Можно извлечь любую передаточную функцию, в которой вы нуждаетесь для анализа из настроенной модели вашей системы управления.
Настраивающие инструменты включают аналитические функции, которые позволяют вам извлечь ответы из своей настроенной системы управления.
Для обобщенного пространства состояний (genss) модели, используйте:
Для slTuner интерфейс, используйте:
В любом случае извлеченные ответы представлены пространством состояний (ss) модели. Можно анализировать эти модели с помощью команд, таких как step, bode\sigma, или margin.
Например, предположите, что вы настраиваете систему управления примером Многоконтурное Управление Вертолета. Вы создали slTuner интерфейс ST0 для модели Simulink. Вы также задали настраивающиеся цели TrackReq, MarginReq1, MarginReq2, и PoleReq. Вы настраиваете систему управления с помощью systune.
AllReqs = [TrackReq,MarginReq1,MarginReq2,PoleReq]; ST1 = systune(ST0,AllReqs);
Final: Soft = 1.12, Hard = -Inf, Iterations = 73
Предположим также тот ST0 имеет аналитические точки, которые включают сигналы под названием theta-ref, theta, phi-ref, и phi. Используйте getIOTransfer извлекать настроенные передаточные функции из theta-ref и phi-ref к theta и phi.
T1 = getIOTransfer(ST1,{'theta-ref','phi-ref'},{'theta','phi'});
step(T1,5)

График шага показывает, что извлеченная передаточная функция является ответом с 2 выходами, с 2 входами от заданных ссылочных входных параметров до заданных выходных параметров.
Для примера, который показывает, как извлечь ответы из настроенного genss модель, смотрите Ответы Извлечения из Настроенной Модели MATLAB в Командной строке.
Для дополнительных примеров смотрите Результаты Проверки.
Для получения информации об извлечении и графическом выводе откликов системы в Control System Tuner, смотрите, Создают Графики отклика в Control System Tuner.
Когда вы настраиваете модель Simulink, программное обеспечение оценивает настраивающиеся цели для линеаризации модели. Точно так же аналитические команды, такие как getIOTransfer извлеките ответы линеаризованной системы. Поэтому необходимо подтвердить настроенные параметры контроллера путем симуляции полной нелинейной модели настроенными параметрами контроллера, даже если настроенная линейная система соответствует всем конструктивным требованиям. Для этого запишите настроенные значения параметров в модель.
Если вы настраиваете модель Simulink в рабочей точке кроме начального условия модели, инициализируете модель в той же рабочей точке прежде, чем подтвердить настроенные параметры контроллера. Смотрите Симулируют Модель Simulink в Определенной Рабочей точке (Simulink Control Design).
Записать настроенные значения блока из настроенного slTuner взаимодействуйте через интерфейс к соответствующей модели Simulink, используйте writeBlockValue команда. Например, предположите ST1 настроенный slTuner интерфейс возвращен systune. Следующая команда пишет настроенные параметры из ST1 к связанной модели Simulink.
writeBlockValue(ST1)
Симулируйте модель Simulink, чтобы оценить производительность системы с настроенными значениями параметров.
Чтобы записать настроенные параметры блоков в модель Simulink, во вкладке Control System, нажимают![]() Update Blocks.
Update Blocks.
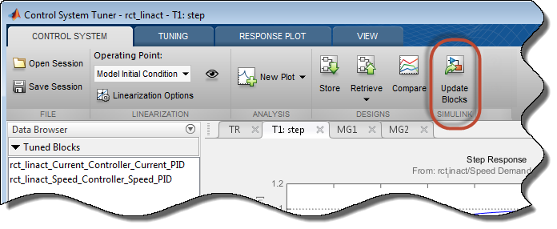
Control System Tuner передает текущие значения настроенных параметров блоков с соответствующими блоками в модели Simulink. Симулируйте модель, чтобы оценить производительность системы с помощью настроенных значений параметров.
Чтобы обновить модель Simulink со значениями параметров из предыдущего проекта, сохраненного в Control System Tuner, нажмите![]() Retrieve и выберите сохраненный проект, что вы хотите сделать текущий проект. Затем нажмите
Retrieve и выберите сохраненный проект, что вы хотите сделать текущий проект. Затем нажмите![]() Update Blocks.
Update Blocks.
