Создайте дорожные спецификации маршрута
lanespec объект задает спецификации маршрута дороги, которая была добавлена к drivingScenario объект с помощью road функция. Для получения дополнительной информации смотрите Спецификации Маршрута.
lnspec = lanespec(numlanes)numlanes маршруты. numLanes устанавливает NumLanes свойство lanespec объект.
NumLanes — Количество маршрутов на дорогеЭто свойство доступно только для чтения.
Количество маршрутов на дороге, заданной как положительный целочисленный или двухэлементный вектор положительных целых чисел, [N L, N R]. Когда NumLanes положительное целое число, весь поток маршрутов в том же направлении. Когда NumLanes вектор:
N L является количеством левых маршрутов, все текущие в одном направлении.
N R является количеством правильных маршрутов, все текущие в противоположном направлении.
Общее количество маршрутов на дороге является суммой этих векторных значений: N = N L + N R.
Можно установить это свойство, когда вы создаете объект. После того, как вы создадите объект, это свойство только для чтения.
Пример: [2 2] задает два левых маршрута и два правильных маршрута.
Width — Ширины маршрутаШирины маршрута, заданные как положительный действительный скаляр или 1 N вектором положительных действительных скаляров, где N является количеством маршрутов на дороге. N должен быть равен numlanes и соответствующий набор значений в NumLanes свойство.
Когда Width скаляр, то же значение применяется ко всем маршрутам. Когда Width вектор, векторные элементы применяются к маршрутам слева направо. Модули исчисляются в метрах.
Пример: [3.5 3.7 3.7 3.5]
Типы данных: double
Marking — Маркировки маршрутаМаркировки маршрута дороги, заданной как маркировка маршрута, возражают или 1 M массивом объектов маркировки маршрута. M является количеством маркировок маршрута. Для дороги с маршрутами N, M = N + 1.
Чтобы создать объекты маркировки маршрута, используйте laneMarking функционируйте и задайте тип маркировки маршрута.
'Unmarked' | 'Solid' | 'Dashed' | 'DoubleSolid' | 'DoubleDashed' | 'SolidDashed' | 'DashedSolid' |
|---|---|---|---|---|---|---|
Никакая маркировка маршрута | Сплошная линия | Пунктирная линия | Две сплошных линии | Две пунктирных линии | Сплошная линия на левой, пунктирной линии на праве | Пунктирная линия на левой, сплошной линии на праве |
|
|
|
|
|
|
|
|
По умолчанию, для односторонней дороги, самые правые и центральные маркировки маршрута являются белыми, и крайняя левая маркировка маршрута является желтой. Для двухсторонних дорог цвет делящейся маркировки маршрута является желтым.
Пример: [laneMarking('Solid') laneMarking('DoubleDashed') laneMarking('Solid')] задает маркировки маршрута для дороги 2D маршрута. Крайние левые и самые правые маркировки маршрута являются сплошными линиями, и делящаяся маркировка маршрута является двойной пунктирной линией.
Type — Типы маршрутаDrivingLaneType объект (значение по умолчанию) | RestrictedLaneType возразите | ShoulderLaneType возразите | ParkingLaneType возразите | 1 M массивом текстовых объектов маршрутаТипы маршрута дороги, заданной как гомогенный текстовый объект маршрута или 1 M массивом текстовых объектов маршрута. M является количеством типов маршрута.
Чтобы создать текстовые объекты маршрута, используйте laneType функционируйте и задайте тип маршрута.
'Driving' | 'Border' | 'Restricted' | 'Shoulder' | 'Parking' |
|
|
|
|
|
|
Пример: [laneType('Shoulder') laneType('Driving')] задает типы маршрута для дороги 2D маршрута. Крайний левый маршрут является маршрутом плеча, и самый правый маршрут является ведущим маршрутом.
Создайте ведущий сценарий и дорожные центры прямой, 80-метровой дороги.
scenario = drivingScenario; roadCenters = [0 0; 80 0];
Создайте lanespec объект для дороги с четырьмя маршрутами. Используйте laneMarking функция, чтобы задать ее пять маркировок маршрута. Центральная линия является двойным чистым и двойным желтым. Наиболее удаленные линии являются твердыми и белыми. Внутренние линии подчеркиваются штриховой линией и белые.
solidW = laneMarking('Solid','Width',0.3); dashW = laneMarking('Dashed','Space',5); doubleY = laneMarking('DoubleSolid','Color','yellow'); lspec = lanespec([2 2],'Width',[5 5 5 5], ... 'Marking',[solidW dashW doubleY dashW solidW]);
Добавьте дорогу к ведущему сценарию. Отобразите дорогу.
road(scenario,roadCenters,'Lanes',lspec);
plot(scenario)
Симулируйте ведущий сценарий с одним автомобилем, перемещающимся на S-кривой. Создайте и постройте контуры маршрута.
Создайте ведущий сценарий с одной дорогой, имеющей S-кривую.
scenario = drivingScenario('StopTime',3);
roadcenters = [-35 20 0; -20 -20 0; 0 0 0; 20 20 0; 35 -20 0];
Создайте маршруты и добавьте их в дорогу.
lm = [laneMarking('Solid','Color','w'); ... laneMarking('Dashed','Color','y'); ... laneMarking('Dashed','Color','y'); ... laneMarking('Solid','Color','w')]; ls = lanespec(3,'Marking',lm); road(scenario,roadcenters,'Lanes',ls);
Добавьте автомобиль, оборудованный датчиком и задайте его траекторию от его скорости и waypoints. Автомобиль перемещается на уровне 30 метров в секунду.
car = vehicle(scenario, ... 'ClassID',1, ... 'Position',[-35 20 0]); waypoints = [-35 20 0; -20 -20 0; 0 0 0; 20 20 0; 35 -20 0]; speed = 30; trajectory(car,waypoints,speed);
Постройте сценарий и соответствующий график преследования.
plot(scenario)

chasePlot(car)

Запустите цикл симуляции.
Инициализируйте видимый с большого расстояния график и создайте плоттер схемы, лево-маршрут и плоттеры контура правильного маршрута и дорожный граничный плоттер.
Получите дорожные контуры и прямоугольные контуры.
Получите контуры маршрута налево и право на транспортное средство.
Усовершенствуйте симуляцию и обновите плоттеры.
bep = birdsEyePlot('XLim',[-40 40],'YLim',[-30 30]); olPlotter = outlinePlotter(bep); lblPlotter = laneBoundaryPlotter(bep,'Color','r','LineStyle','-'); lbrPlotter = laneBoundaryPlotter(bep,'Color','g','LineStyle','-'); rbsEdgePlotter = laneBoundaryPlotter(bep); legend('off'); while advance(scenario) rbs = roadBoundaries(car); [position,yaw,length,width,originOffset,color] = targetOutlines(car); lb = laneBoundaries(car,'XDistance',0:5:30,'LocationType','Center', ... 'AllBoundaries',false); plotLaneBoundary(rbsEdgePlotter,rbs) plotLaneBoundary(lblPlotter,{lb(1).Coordinates}) plotLaneBoundary(lbrPlotter,{lb(2).Coordinates}) plotOutline(olPlotter,position,yaw,length,width, ... 'OriginOffset',originOffset,'Color',color) end



Маркировки маршрута в пересечениях не поддержаны.
Количество маршрутов для дороги фиксируется. Вы не можете изменить спецификации маршрута для дороги во время симуляции.
Дорога может иметь только однополосную спецификацию.
Схема показывает компоненты и геометрические свойства дорог, маршрутов и маркировок маршрута.
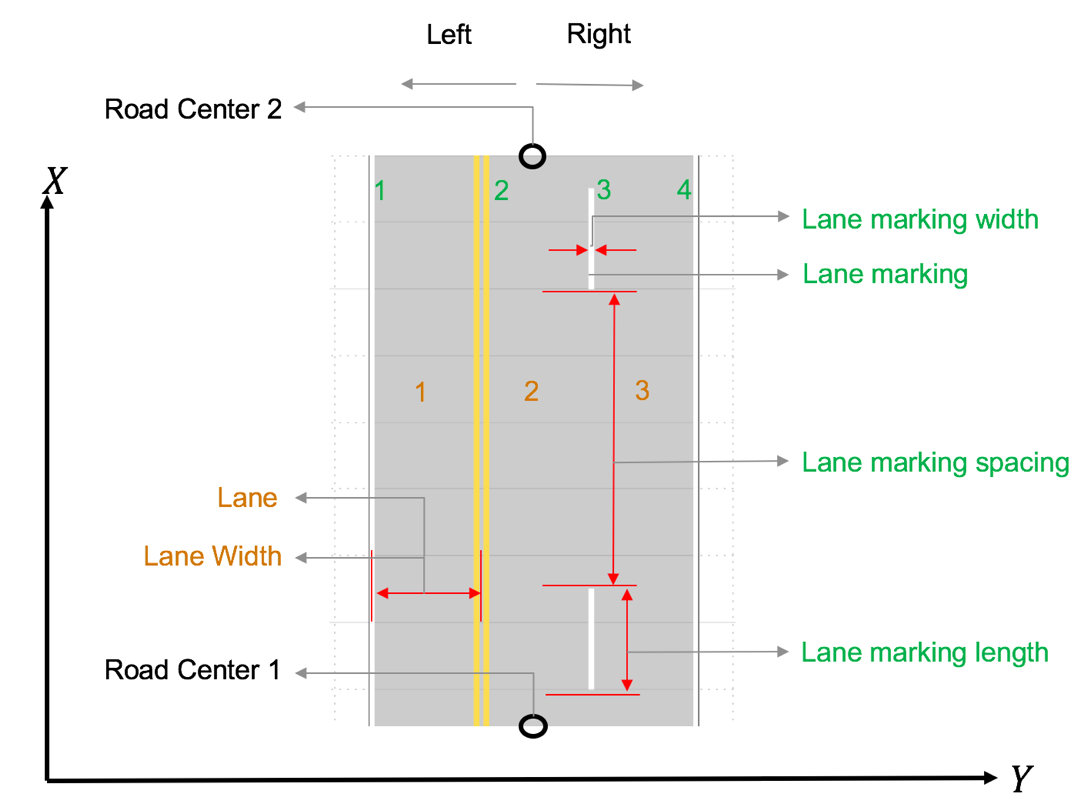
Левый и правый заданы относительно дорожных центров. Задайте дорожные центры как матричный вход к road функция. Дорожные центры создают направленную линию, запускающуюся от первой строки до последней строки матрицы. Левое и правое среднее значение, левое и правое из направленной линии. Ширина дороги является суммой всех ширин маршрута плюс половина ширин маркировок контура левого края и правого края.
Объект спецификации маршрута, lanespec, задает дорожные маршруты.
NumLanes свойство задает количество маршрутов. Необходимо задать количество маршрутов, когда вы создаете этот объект.
Width свойство задает ширину каждого маршрута.
Marking свойство содержит спецификации каждой маркировки маршрута на дороге. Marking массив объектов маркировки маршрута, с одним объектом на маршрут. Чтобы создать эти объекты, используйте laneMarking функция. Спецификации маркировки маршрута включают:
Type — Тип маркировки маршрута (тело, подчеркнутое штриховой линией, и так далее)
Width — Ширина маркировки маршрута
Color — Цвет маркировки маршрута
Length — Для пунктирных маршрутов, длины каждой пунктирной линии
Spacing — Для пунктирных маршрутов, интервала между тире
Type свойство содержит спецификации типа маршрута каждого маршрута на дороге. Type может быть гомогенный текстовый объект маршрута или неоднородный массив типа маршрута.
Гомогенный текстовый объект маршрута содержит спецификации типа маршрута всех маршрутов на дороге.
Неоднородный массив типа маршрута содержит массив текстовых объектов маршрута с одним объектом на маршрут.
Чтобы создать эти объекты, используйте laneType функция. Спецификации типа маршрута включают:
Type — Тип маршрута (управление, граница, и так далее)
Color — Цвет маршрута
Strength — Сила цвета маршрута
drivingScenario | laneBoundaryPlotter | laneMarking | laneMarkingPlotter | laneMarkingVertices | laneType | plotLaneBoundary | plotLaneMarking | road