Этот пример показывает вам, как создать ведущий сценарий и сгенерировать видение и радарные обнаружения датчика от него при помощи приложения Driving Scenario Designer. Можно использовать эти обнаружения, чтобы протестировать контроллеры или алгоритмы сплава датчика.
Этот пример покрывает целый рабочий процесс для создания сценария и генерации синтетических обнаружений. В качестве альтернативы можно сгенерировать обнаружения из предварительно созданных сценариев. Для получения дополнительной информации см. Предварительно созданные Ведущие Сценарии в Driving Scenario Designer.
Чтобы открыть приложение, в командной строке MATLAB®, вводят drivingScenarioDesigner.
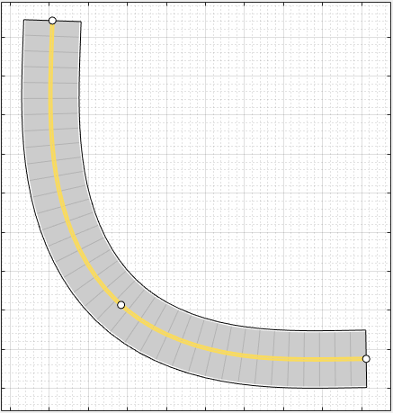
Добавьте кривую дорогу к холсту сценария. На панели инструментов приложения нажмите Add Road. Затем кликните по одному углу холста, расширьте дорогу к противоположному углу и дважды кликните, чтобы создать дорогу.
Чтобы сделать дорожную кривую, добавьте road center, вокруг которого можно изогнуть ее. Щелкните правой кнопкой по середине дороги и выберите Add Road Center. Затем перетащите добавленный дорожный центр к одному из пустых углов холста.
Чтобы настроить дорогу далее, можно перетащить любой из дорожных центров. Чтобы создать более комплексные кривые, добавьте больше дорожных центров.
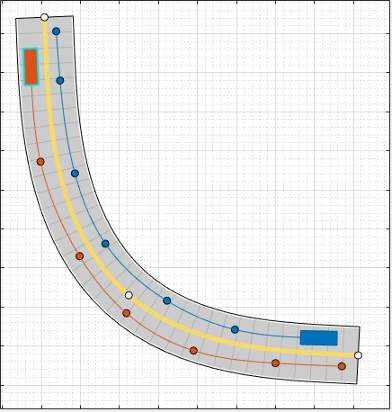
По умолчанию дорога является однополосным и не имеет никаких маркировок маршрута. Чтобы сделать сценарий более реалистичным, преобразуйте дорогу в магистраль 2D маршрута. На левой панели, на вкладке Roads, расширяют раздел Lanes. Установите Number of lanes на [1 1] и Lane Width к 3.6 метры, который является типичной магистральной шириной маршрута.
Белые, серьезные маркировки маршрутов на любом ребре дороги указывают на дорожное плечо. Желтая, двойная серьезная маркировка маршрута в центре указывает, что дорога является двухсторонней. Смотреть или изменить эти маршруты, из списка Marking, избранного одного из маршрутов и изменять параметры маршрута.
По умолчанию первым автомобилем, который вы добавляете в сценарий, является ego vehicle, который является основным автомобилем в ведущем сценарии. Автомобиль, оборудованный датчиком содержит датчики, которые обнаруживают маркировки маршрута, пешеходов или другие автомобили в сценарии. Добавьте автомобиль, оборудованный датчиком, и затем добавьте второй автомобиль для автомобиля, оборудованного датчиком, чтобы обнаружить.
Чтобы добавить автомобиль, оборудованный датчиком, щелкните правой кнопкой по одному концу дороги и выберите Add Car. Чтобы задать траекторию автомобиля, щелкните правой кнопкой по автомобилю, выберите Add Waypoints и добавьте waypoints вдоль дороги для автомобиля, чтобы пройти. После того, как вы добавите последний waypoint вдоль дороги, нажмите Enter. Автомобиль самовращается в направлении первого waypoint. Для более прекрасной точности по траектории можно настроить waypoints. Можно также щелкнуть правой кнопкой по пути, чтобы добавить новый waypoints.
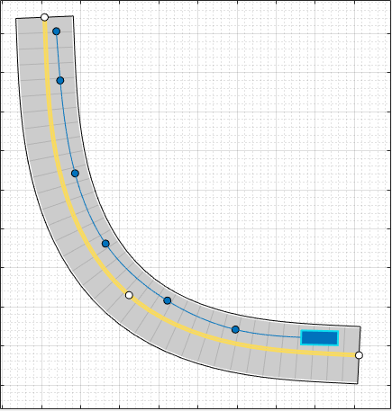
Теперь настройте скорость автомобиля. На левой панели, на вкладке Actors, устанавливает Constant Speed на 15 m/s. Для большего количества управления скоростью автомобиля снимите флажок Constant Speed и установите скорость между waypoints в таблице Waypoints.
Добавьте транспортное средство для автомобиля, оборудованного датчиком, чтобы обнаружить. На панели инструментов приложения нажмите Add Actor и выберите Car. Добавьте второй автомобиль с waypoints, управляющим в маршруте напротив от автомобиля, оборудованного датчиком и на другом конце дороги. Оставьте скорость и другие настройки автомобиля неизменными.
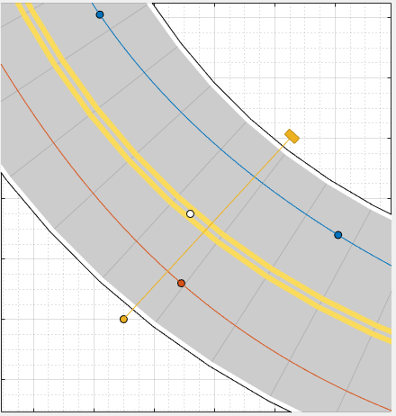
Добавьте в сценарий пешеходный переход дорога. Увеличение (Ctrl+Plus) на середине дороги, щелкните правой кнопкой по одной стороне дороги и нажмите Add Pedestrian. Затем чтобы установить путь пешехода, добавьте waypoint с другой стороны дороги.
Чтобы протестировать скорость автомобилей и пешехода, запустите симуляцию. Настройте скорости агента или другие свойства по мере необходимости путем выбора агента из левой панели вкладки Actors.
Добавьте обращенный к передней стороне радар и видение (камера) датчики к автомобилю, оборудованному датчиком. Используйте эти датчики, чтобы сгенерировать обнаружения пешехода, контуров маршрута и другого транспортного средства.
На панели инструментов приложения нажмите Add Camera. Холст датчика показывает стандартные местоположения, в которых можно поместить датчики. Щелкните передняя сторона больше всего предопределила местоположение датчика, чтобы добавить датчик камеры в передний бампер автомобиля, оборудованного датчиком. Чтобы поместить датчики более точно, можно отключить привязывающиеся опции. В нижнем левом углу холста датчика нажмите кнопку Configure the Sensor Canvas![]() .
.
По умолчанию камера обнаруживает только агентов и не маршруты. Чтобы включить обнаружения маршрута, на вкладке Sensors на левой панели, расширяют раздел Detection Parameters и устанавливают Detection Type на Objects & Lanes. Затем расширьте раздел Lane Settings и обновите настройки по мере необходимости.
Привяжите радарный датчик к оставленному передней стороне колесу. Щелкните правой кнопкой по предопределенному местоположению датчика для колеса и выберите Add Radar. По умолчанию датчики, добавленные к колесам, являются малой дальностью.
Наклоните радарный датчик к передней стороне автомобиля. Переместите свой курсор через зону охвата, затем перетащите угловую маркировку.
Добавьте идентичный радарный датчик в переднее правильное колесо. Щелкните правой кнопкой по датчику по оставленному передней стороне колесу и нажмите Copy. Затем щелкните правой кнопкой по предопределенному местоположению датчика для переднего правильного колеса и нажмите Paste. Ориентация скопированного датчика зеркально отражает ориентацию датчика на противоположном колесе.
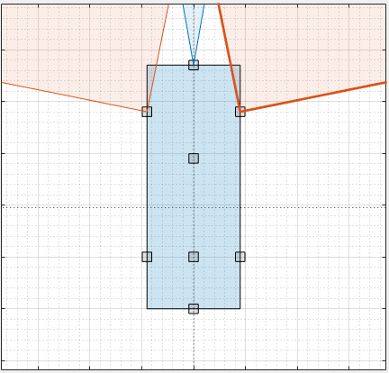
Датчики камеры и радара теперь предоставляют перекрывающуюся страховую защиту передней стороны автомобиля, оборудованного датчиком.
Чтобы сгенерировать обнаружения от датчиков, нажмите Run. Когда сценарий запускается, Ego-Centric View отображает сценарий с точки зрения автомобиля, оборудованного датчиком. Bird’s-Eye Plot отображает обнаружения.
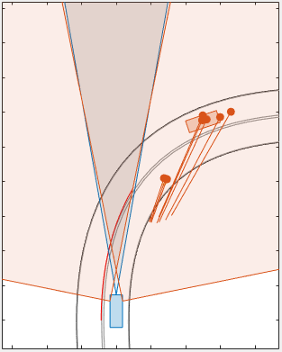
Чтобы выключить определенные типы обнаружений, в нижнем левом углу видимого с большого расстояния графика, нажимают кнопку Configure the Bird's-Eye Plot![]() .
.
По умолчанию сценарий заканчивается, когда первый агент останавливается. Чтобы запустить сценарий для количества времени набора, на панели инструментов приложения, нажимают Settings и изменяют условие остановки.
Чтобы экспортировать обнаружения в рабочее пространство MATLAB, на панели инструментов приложения, выбирают Export> Export Sensor Data. Назовите переменную рабочей области и нажмите OK. Приложение сохраняет данные о датчике как структуру, содержащую положения агента, обнаружения объектов и обнаружения маршрута на каждом временном шаге.
Чтобы экспортировать функцию MATLAB, которая генерирует сценарий и его обнаружения, выберите Export> Export MATLAB Function. Эта функция возвращает обнаружения датчика как структуру, сценарий как drivingScenario объект и модели датчика как visionDetectionGenerator и radarDetectionGenerator Системные объекты. Путем изменения этой функции можно создать изменения исходного сценария. Для примера этого процесса смотрите, Создают Ведущие Изменения Сценария Программно.
После того, как вы сгенерируете обнаружения, нажмите Save, чтобы сохранить файл сценария. Кроме того, можно сохранить модели датчика как отдельные файлы. Можно также сохранить дорогу и модели агента вместе как отдельный файл сценария.
Можно вновь открыть этот файл сценария из приложения. В качестве альтернативы в командной строке MATLAB, можно использовать этот синтаксис.
drivingScenarioDesigner(scenarioFileName)drivingScenario объект. В командной строке MATLAB используйте этот синтаксис.drivingScenarioDesigner(scenario)
drivingScenario возразите в свою модель. Этот блок непосредственно не считывает данные о датчике. Добавить датчики создало в приложении к модели Simulink, можно сгенерировать модель, содержащую сценарий и датчики путем выбора Export> Export Simulink Model. В этой модели блок Scenario Reader читает сценарий и Radar Detection Generator, и блоки Vision Detection Generator моделируют датчики.