Спроектируйте ведущие сценарии, сконфигурируйте датчики и сгенерируйте синтетические обнаружения объектов
Приложение Driving Scenario Designer позволяет вам спроектировать синтетический продукт ведущие сценарии для тестирования ваших систем автономного управления автомобилем.
Используя приложение, вы можете:
Крит-Роуд и модели агента с помощью интерфейса перетаскивания.
Сконфигурируйте видение и радарные датчики, смонтированные на автомобиле, оборудованном датчиком, и используйте эти датчики, чтобы симулировать обнаружения агентов и контуров маршрута в сценарии.
Загрузите ведущие сценарии, представляющие европейскую Новую Автомобильную Программу Оценки (Euro NCAP®) тестовые протоколы [1][2][3] и другие предварительно созданные сценарии.
Импортируйте дороги OpenDRIVE® и маршруты в ведущий сценарий. Поддержки приложений версия 1.4H [4] спецификации формата OpenDRIVE.
Экспортируйте синтетические обнаружения датчика в MATLAB®.
Сгенерируйте код MATLAB сценария и датчиков, и затем программно измените сценарий и импортируйте его назад в приложение для дальнейшей симуляции.
Сгенерируйте модель Simulink® из сценария и датчиков, и используйте сгенерированные модели, чтобы протестировать ваш сплав датчика или алгоритмы управления транспортного средства.
Чтобы узнать больше о приложении, смотрите Driving Scenario Designer.
Панель инструментов MATLAB: На вкладке Apps, под Automotive, кликают по значку приложения.
Командная строка MATLAB: Введите drivingScenarioDesigner.
Создайте ведущий сценарий транспортного средства, едущего по кривой дороге, и экспортируйте дорогу и модели транспортных средств к рабочему пространству MATLAB. Для более подробного примера создания ведущего сценария смотрите Сборку Ведущий Сценарий и Сгенерируйте Синтетические Обнаружения.
Откройте приложение Driving Scenario Designer.
drivingScenarioDesigner
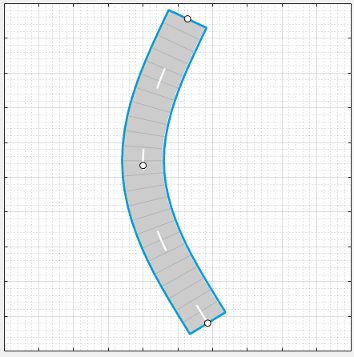
Создайте кривую дорогу. На панели инструментов приложения нажмите Add Road. Кликните по нижней части холста, расширьте дорожный путь к середине холста и кликните по холсту снова. Расширьте дорожный путь к верхней части холста, и затем дважды кликните, чтобы создать дорогу. Чтобы сделать кривую более комплексной, перетащите дорожные центры (открытые круги) или дважды кликните дорогу, чтобы добавить больше дорожных центров.
Добавьте маршруты в дорогу. На левой панели, на вкладке Roads, расширяют раздел Lanes. Установите Number of lanes на 2.
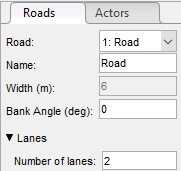
По умолчанию дорога является односторонней и имеет серьезные маркировки маршрута с обеих сторон, чтобы указать на плечо.
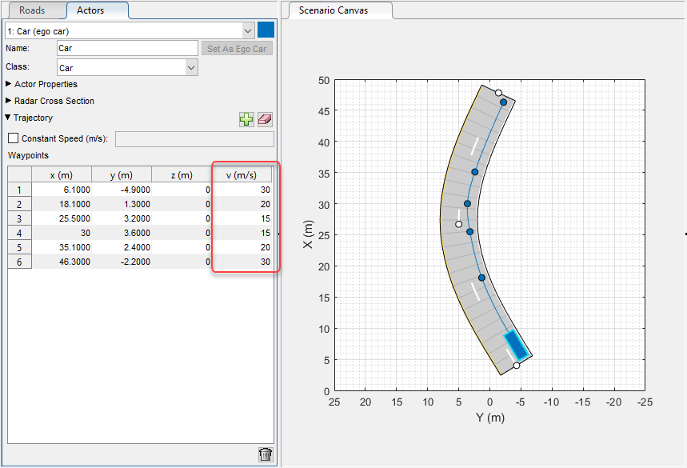
Добавьте транспортное средство в одном конце дороги. На панели инструментов приложения выберите Add Actor> Car. Затем кликните по дороге, чтобы установить исходное положение автомобиля.
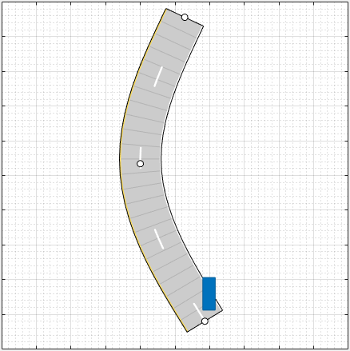
Установите ведущий путь автомобиля. Щелкните правой кнопкой по автомобилю, выберите Add Waypoints и добавьте waypoints для автомобиля, чтобы пройти. После того, как вы добавите последний waypoint, нажмите Enter. Автомобиль самовращается в направлении первого waypoint.
Настройте скорость автомобиля, когда это передает между waypoints. На левой панели, на вкладке Actors, в разделе Path, снимают флажок Constant Speed. Затем в таблице Waypoints, устанавливает скорость, v (m/s), автомобиля в m/s, когда это вводит каждый waypoint сегмент. Чтобы смоделировать более реалистические условия, увеличьте скорость автомобиля для прямых сегментов и уменьшите его скорость для изогнутых сегментов. Например:
Запустите сценарий и настройте настройки по мере необходимости. Затем нажмите Save> Roads & Actors, чтобы сохранить дорогу и модели автомобилей к MAT-файлу.
Сгенерируйте обнаружения датчика видения из предварительно созданного ведущего сценария Евро тестовый протокол NCAP.
Для получения дополнительной информации о предварительно созданных сценариях, доступных из приложения, см. Предварительно созданные Ведущие Сценарии в Driving Scenario Designer.
Для получения дополнительной информации о доступном Евро сценарии NCAP смотрите Евро NCAP Управление Сценариями в Driving Scenario Designer.
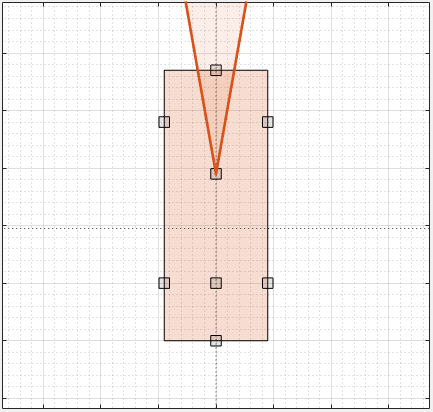
Загрузите Евро сценарий автономного экстренного торможения (AEB) NCAP столкновения с пешеходным дочерним элементом. Во время столкновения точка падения ракеты происходит 50% пути через ширину автомобиля.
path = fullfile(matlabroot,'toolbox','shared','drivingscenario', ... 'PrebuiltScenarios','EuroNCAP'); addpath(genpath(path)) % Add folder to path drivingScenarioDesigner('AEB_PedestrianChild_Nearside_50width.mat') rmpath(path) % Remove folder from path
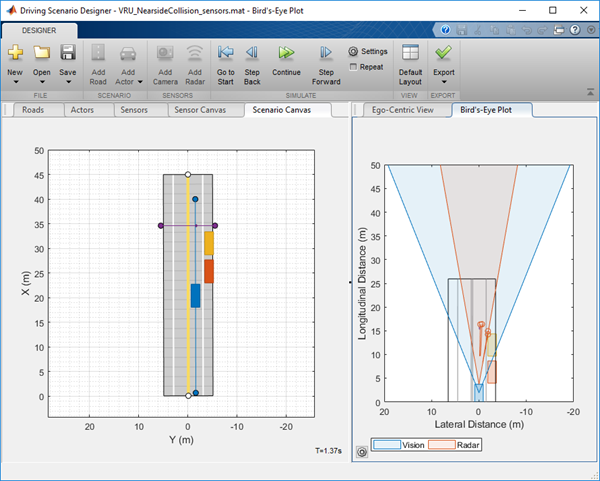
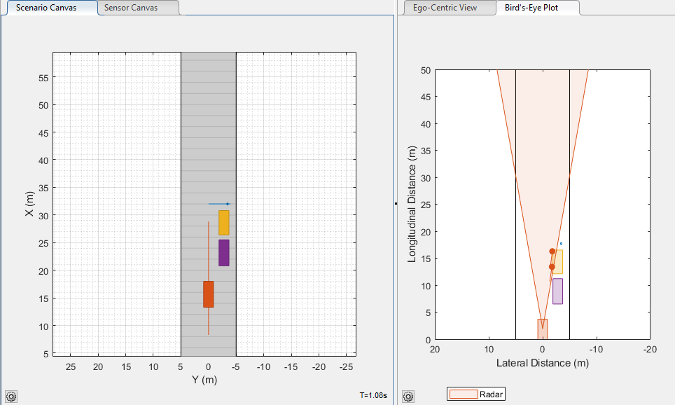
Добавьте обращенный к передней стороне радарный датчик в автомобиль, оборудованный датчиком. Сначала нажмите Add Radar. Затем на Sensor Canvas кликните по предопределенному местоположению датчика в переднем окне автомобиля. По умолчанию радар является длинным диапазоном.
Запустите сценарий. В то время как симуляция сценария запускается, смотрите различные аспекты симуляции путем переключения между холстами и представлениями. Можно переключиться между Sensor Canvas и Scenario Canvas и между Bird's-Eye Plot и Ego-Centric View.
Экспортируйте данные о датчике в рабочее пространство MATLAB. Нажмите Export > Export Sensor Data, введите имя переменной рабочей области и нажмите OK.
Создайте ведущий сценарий программно и импортируйте тот сценарий в приложение. Для получения дополнительной информации о работе с программируемыми ведущими сценариями смотрите, Создают Ведущие Изменения Сценария Программно.
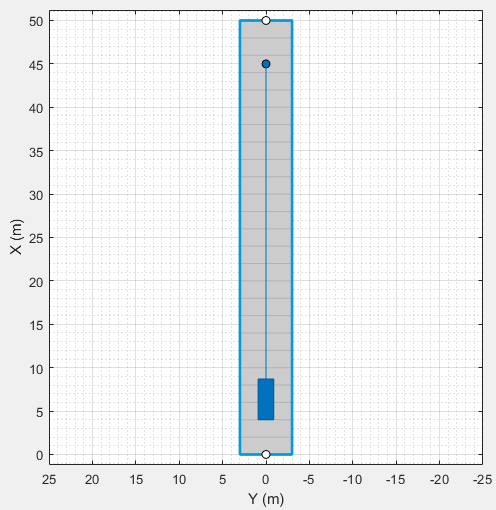
Создайте простой ведущий сценарий при помощи drivingScenario объект. В этом сценарии автомобиль, оборудованный датчиком перемещается прямо на 50-метровом дорожном сегменте на постоянной скорости 30 метров в секунду. Для автомобиля, оборудованного датчиком задайте ClassID из 1. Это значение соответствует приложению Class ID 1, который отсылает к агентам класса Car. Для получения дополнительной информации о том, как приложение задает классы, см. описание параметра Class под Агентами.
scenario = drivingScenario; roadCenters = [0 0 0; 50 0 0]; road(scenario, roadCenters); egoVehicle = vehicle(scenario,'ClassID',1,'Position',[5 0 0]); waypoints = [5 0 0; 45 0 0]; speed = 30; trajectory(egoVehicle,waypoints,speed);
Импортируйте сценарий в приложение. Затем запустите сценарий или измените его. Сгенерировать новый drivingScenario объект, на панели инструментов приложения, выбирает Export> Export MATLAB Function, и затем запускает сгенерированную функцию.
drivingScenarioDesigner(scenario)
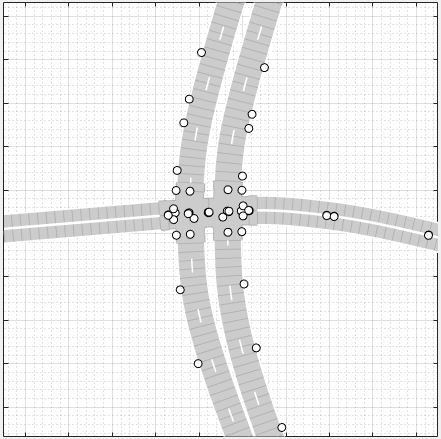
Импортируйте дороги и маршруты от дорожной сети OpenDRIVE в приложение Driving Scenario Designer. Для более подробного примера смотрите Импорт Дороги OpenDRIVE в Управление Сценарием.
Откройте приложение Driving Scenario Designer.
drivingScenarioDesigner
На панели инструментов приложения выберите Open> OpenDRIVE Road Network. Затем от вашей корневой папки MATLAB перейдите к и откройте этот файл:
matlabroot/examples/driving/intersection.xodr
Загрузите ведущий сценарий, содержащий датчик, и сгенерируйте модель Simulink из сценария и датчика. Для более подробного примера при генерации моделей Simulink из приложения смотрите, Генерируют Блоки Обнаружения Датчика Используя Driving Scenario Designer.
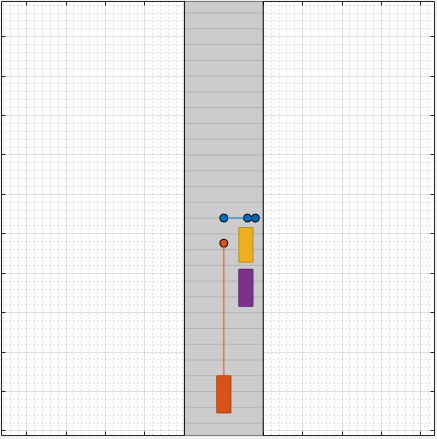
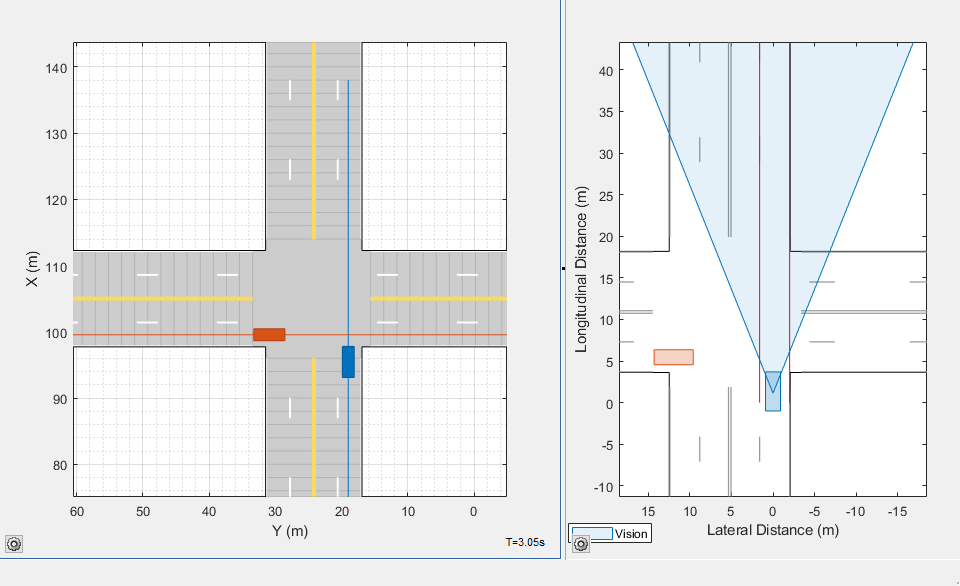
Загрузите предварительно созданный ведущий сценарий в приложение. Сценарий содержит два транспортных средства, пересекающиеся через пересечение. Автомобиль, оборудованный датчиком перемещается на север и содержит датчик камеры. Этот датчик сконфигурирован, чтобы обнаружить и объекты и маршруты.
path = fullfile(matlabroot,'toolbox','shared','drivingscenario','PrebuiltScenarios'); addpath(genpath(path)) % Add folder to path drivingScenarioDesigner('EgoVehicleGoesStraight_VehicleFromLeftGoesStraight.mat') rmpath(path) % Remove folder from path
Сгенерируйте модель Simulink сценария и датчика. На панели инструментов приложения выберите Export> Export Simulink Model. Если вам предлагают, сохранили файл сценария.
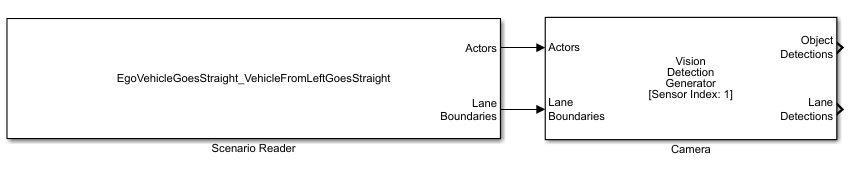
Блок Scenario Reader читает дорогу и агентов из файла сценария. Чтобы обновить данные о сценарии в модели, обновите сценарий в приложении и сохраните файл.
Блок Vision Detection Generator воссоздает датчик камеры, заданный в приложении. Чтобы обновить датчик в модели, обновите датчик в приложении, выберите Export> Export Sensor Simulink Model и скопируйте недавно сгенерированный блок датчика в модель. Если вы обновили какие-либо дороги или агентов при обновлении датчиков то выберите Export> Export Simulink Model. В этом случае блок Scenario Reader точно считывает данные о профиле агента и передает их датчику.
Roads — Дорожная ширина, угол банка, спецификации маршрута и дорога сосредотачивают местоположенияЧтобы включить параметры Roads, добавьте по крайней мере одну дорогу к сценарию. Затем выберите дорогу или из Scenario Canvas или из параметра Road. Значения параметров во вкладке Roads основаны на дороге, которую вы выбираете.
| Параметр | Описание |
|---|---|
| Road | Дорога, чтобы изменить, заданный как список дорог в сценарии. |
| Name | Имя дороги. |
| Width (m) | Ширина дороги, в метрах, заданных как десятичный скаляр в области значений (0, 50]. Если искривление дороги слишком резко, чтобы разместить заданную дорожную ширину, приложение не генерирует дорогу. Значение по умолчанию: |
| Bank Angle (deg) | Наклонная поверхность от одной стороны к другой дороги, в градусах, заданный как одно из этих значений:
Когда вы добавляете агента в дорогу, вы не должны менять положение агента, чтобы совпадать с углами банка, заданными этим параметром. Агент автоматически следует за углами банка дороги. Значение по умолчанию: |
| Параметр | Описание | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Number of lanes | Количество маршрутов на дороге, заданной как одно из этих значений:
Если вы увеличиваете число маршрутов, добавленные маршруты имеют ширину, заданную в параметре Lane Width (m). Если Lane Width (m) является вектором отличающихся ширин маршрута, то добавленные маршруты имеют ширину, заданную в последнем векторном элементе. | ||||||||||||||||||
| Lane Width (m) | Ширина каждого маршрута на дороге, в метрах, заданных как одно из этих значений:
Ширина каждого маршрута должна быть больше ширины маркировок маршрута, которые это содержит. Эти маркировки маршрута заданы параметром Marking > Width (m). | ||||||||||||||||||
| Marking | Маркировка маршрута, чтобы изменить, заданный как список маркировок маршрута на выбранной дороге. Дорога с маршрутами N имеет (N + 1) маркировки маршрута. | ||||||||||||||||||
| Marking > Type | Тип маркировки маршрута, заданной как одно из этих значений:
По умолчанию, для односторонней дороги, крайний левый маршрут является твердым и желтым, самый правый маршрут является твердым и белым, и внутренние маршруты подчеркиваются штриховой линией и белые. Для двухсторонних дорог делящаяся маркировка маршрута является двумя чисто желтыми линиями. | ||||||||||||||||||
| Marking > Color | Цвет маркировки маршрута, заданной как триплет RGB или название цвета. Для пользовательского цвета укажите триплет RGB. Триплет RGB представляет собой трехэлементный вектор-строку, элементы которого определяют интенсивность красных, зеленых и синих компонентов цвета. Интенсивность должны быть в диапазоне [0,1]; например, [0,4 0,6 0,7]. Кроме того, вы можете задать имена некоторых простых цветов. Эта таблица приводит опции именованного цвета и эквивалентные значения триплета RGB.
Для двойного маркера маршрута тот же цвет используется в обеих линиях. | ||||||||||||||||||
| Marking > Strength | Сила насыщения цвета маркировки маршрута, заданного как десятичный скаляр в области значений [0, 1].
Для двойной маркировки маршрута та же сила используется в обеих линиях. Значение по умолчанию: | ||||||||||||||||||
| Marking > Width (m) | Ширина маркировки маршрута, в метрах, заданных как положительный десятичный скаляр. Ширина маркировки маршрута должна быть меньше ширины своего маршрута включения. Маршрут включения является маршрутом непосредственно слева от маркировки маршрута. Для двойного маркера маршрута та же ширина используется в обеих линиях. Значение по умолчанию: | ||||||||||||||||||
| Marking > Length (m) | Длина тире в пунктирных маркировках маршрута, в метрах, заданных как положительный десятичный скаляр в области значений (0, 50]. Для двойной маркировки маршрута та же длина используется в обеих линиях. Значение по умолчанию: | ||||||||||||||||||
| Marking > Space (m) | Продолжительность пробелов между тире в пунктирных маркировках маршрута, в метрах, заданных как десятичный скаляр в области значений (0, 150]. Значение по умолчанию: |
Каждая строка таблицы Road Centers содержит x - y - и z - позиции дорожного центра в выбранной дороге. Все дороги должны иметь по крайней мере два уникальных дорожных центральных положения. Когда вы обновляете ячейку в рамках таблицы, Scenario Canvas обновляется, чтобы отразить новое дорожное центральное положение.
| Параметр | Описание |
|---|---|
| x (m) | x- позиция оси дорожного центра, в метрах, заданных как десятичный скаляр. |
| y (m) | y- позиция оси дорожного центра, в метрах, заданных как десятичный скаляр. |
| z (m) | z- позиция оси дорожного центра, в метрах, заданных как десятичный скаляр.
Значение по умолчанию: |
Actors — Положения агента, ориентации, шаблоны RCS и траекторииЧтобы включить параметры Actors, добавьте по крайней мере одного агента в сценарий. Затем выберите агента или из Scenario Canvas или из списка на вкладке Actors. Значения параметров во вкладке Actors основаны на агенте, которого вы выбираете.
| Параметр | Описание | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Set as Ego Vehicle | Установите выбранного агента как автомобиль, оборудованный датчиком в сценарии. Когда вы добавляете датчики в свой сценарий, приложение добавляет их в автомобиль, оборудованный датчиком. Кроме того, окна Ego-Centric View и Bird's-Eye Plot отображают симуляции с точки зрения автомобиля, оборудованного датчиком. Только агенты, у кого есть классы транспортного средства, такие как | ||||||||||||
| Name | Имя агента. | ||||||||||||
| Class | Класс агента, заданного как список классов, в которые можно изменить выбранного агента. Можно изменить класс агентов транспортного средства только к другим классам транспортного средства, таким как Список классов транспортного средства и нетранспортного средства появляется в панели инструментов приложения, в Add Actor> Vehicles и Add Actor> разделы Other, соответственно. Агенты, созданные в приложении, имеют набор по умолчанию размерностей, радарных шаблонов поперечного сечения и других свойств на основе их значения Class ID. Таблица показывает значения Class ID по умолчанию и классы агента.
Чтобы изменить классы агента или создать новые классы агента, на панели инструментов приложения, выбирают Add Actor> Edit Actor Classes или Add Actor> New Actor Class, соответственно. |
Свойства агента включают положение и ориентацию агента.
| Параметр | Описание |
|---|---|
| Length (m) | Длина агента, в метрах, заданных как десятичный скаляр в области значений (0, 60]. Для транспортных средств длина должна быть больше (Front Overhang + Rear Overhang). |
| Width (m) | Ширина агента, в метрах, заданных как десятичный скаляр в области значений (0, 20]. |
| Height (m) | Высота агента, в метрах, заданных как десятичный скаляр в области значений (0, 20]. |
| Front Overhang | Расстояние между передней осью и передним бампером, в метрах, заданных как десятичный скаляр. Передний нависающий край должен быть меньше (Length (m) – Rear Overhang). Этот параметр применяется к транспортным средствам только. Значение по умолчанию: |
| Rear Overhang | Расстояние между задней осью и задним бампером, в метрах, заданных как десятичный скаляр. Задний нависающий край должен быть меньше (Length (m) – Front Overhang). Этот параметр применяется к транспортным средствам только. Значение по умолчанию: |
| Roll | Угол ориентации агента о его x - ось, в градусах, заданный как десятичный скаляр. Roll по часовой стрелке положителен при взгляде в прямом направлении x - ось, которая указывает вперед от агента. Когда вы экспортируете функцию MATLAB ведущего сценария и запускаете эту функцию, углы вращения агентов в выходном сценарии перенесены к области значений [–180, 180]. Значение по умолчанию: |
| Pitch | Угол ориентации агента о его y - ось, в градусах, заданный как десятичный скаляр. Pitch по часовой стрелке положителен при взгляде в прямом направлении y - ось, которая указывает слева от агента. Когда вы экспортируете функцию MATLAB ведущего сценария и запускаете эту функцию, углы подачи агентов в выходном сценарии перенесены к области значений [–180, 180]. Значение по умолчанию: |
| Yaw | Угол ориентации агента о его z - ось, в градусах, заданный как десятичный скаляр. Yaw по часовой стрелке положителен при взгляде в прямом направлении z - ось, которая подчеркивает от земли. Однако Scenario Canvas имеет перспективу вида с высоты птичьего полета, которая смотрит в обратном направлении z - ось. Поэтому при просмотре агентов на этом холсте, Yaw против часовой стрелки положителен. Когда вы экспортируете функцию MATLAB ведущего сценария и запускаете эту функцию, углы отклонения от курса агентов в выходном сценарии перенесены к области значений [–180, 180]. Значение по умолчанию: |
Используйте эти параметры, чтобы вручную задать радарное поперечное сечение (RCS) агента. В качестве альтернативы, чтобы импортировать RCS из файла или из рабочего пространства MATLAB, расширьте этот раздел параметра и нажмите Import.
| Параметр | Описание |
|---|---|
| Azimuth Angles (deg) | Горизонтальный отражательный шаблон агента, в градусах, заданный как вектор монотонно увеличения десятичных значений в области значений [–180, 180]. Значение по умолчанию: |
| Elevation Angles (deg) | Вертикальный отражательный шаблон агента, в градусах, заданный как вектор монотонно увеличения десятичных значений в области значений [–90, 90]. Значение по умолчанию: |
| Pattern (dBsm) | Шаблон RCS, в децибелах на квадратный метр, заданный как Q-by-P таблица десятичных значений. RCS является функцией азимута и углов вертикального изменения, где:
|
Вручную установите или измените положения и скорости агентов в их заданном waypoints.
| Параметр | Описание |
|---|---|
| Constant Speed (m/s) | Выберите этот параметр, чтобы установить постоянную скорость для агента через все его waypoints. Задайте эту постоянную скорость как положительный десятичный скаляр в метрах в секунду. Если вы очищаете этот параметр, используйте таблицу Waypoints, чтобы задать скорость агента в каждом waypoint. Значение по умолчанию: |
| Waypoints | Агент waypoints, заданный как таблица. Каждая строка таблицы содержит информацию о положении и скорости waypoint. Столбцы таблицы следующие:
|
Sensors (Camera) — Размещение датчика камеры, внутренние параметры камеры и параметры обнаруженияЧтобы получить доступ к этим параметрам, добавьте по крайней мере один датчик камеры в сценарий путем выполнения этих шагов:
на панели инструментов приложения нажмите Add Camera.
От вкладки Sensors выберите датчик из списка. Значения параметров в этой вкладке основаны на датчике, который вы выбираете.
| Параметр | Описание |
|---|---|
| Enabled | Включите или отключите выбранный датчик. Выберите этот параметр, чтобы собрать данные о датчике в процессе моделирования и визуализировать те данные в панели Bird's-Eye Plot. |
| Name | Имя датчика. |
| Update Interval (ms) | Частота, на которой датчик обновляется, в миллисекундах, заданных как целочисленное кратное шаг расчета приложения, заданный под Settings, в параметре Sample Time (ms). Значение Update Interval (ms) по умолчанию Если вы обновляете шаг расчета приложения, таким образом, что датчик больше не является кратным шагу расчета приложения, приложение предлагает вам с опцией автоматически обновлять параметр Update Interval (ms) к самому близкому целому числу несколько. Значение по умолчанию: |
| Type | Тип датчика, заданного или как Radar для радарных датчиков или как Vision для датчиков камеры. |
| Параметр | Описание |
|---|---|
| X (m) | X- положение оси датчика в системе координат транспортного средства, в метрах, заданных как десятичный скаляр. X - ось указывает вперед от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Y (m) | Y- положение оси датчика в системе координат транспортного средства, в метрах, заданных как десятичный скаляр. Y - ось указывает слева от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Height (m) | Высота датчика над землей, в метрах, заданных как положительный десятичный скаляр. Значение по умолчанию: |
| Roll | Угол ориентации датчика о его X - ось, в градусах, заданный как десятичный скаляр. Roll по часовой стрелке положителен при взгляде в прямом направлении X - ось, которая указывает вперед от датчика. Значение по умолчанию: |
| Pitch | Угол ориентации датчика о его Y - ось, в градусах, заданный как десятичный скаляр. Pitch по часовой стрелке положителен при взгляде в прямом направлении Y - ось, которая указывает слева от датчика. Значение по умолчанию: |
| Yaw | Угол ориентации датчика о его Z - ось, в градусах, заданный как десятичный скаляр. Yaw по часовой стрелке положителен при взгляде в прямом направлении Z - ось, которая подчеркивает от земли. Однако Sensor Canvas имеет перспективу вида с высоты птичьего полета, которая смотрит в обратном направлении Z - ось. Поэтому при просмотре зон охвата датчика на этом холсте, Yaw против часовой стрелки положителен. |
| Параметр | Описание |
|---|---|
| Focal Length X | Горизонтальная точка, в которой камера находится в особом внимании, в пикселях, заданных как положительный десятичный скаляр. Фокусное расстояние по умолчанию изменяется в зависимости от того, куда вы помещаете датчик в автомобиль, оборудованный датчиком. |
| Focal Length Y | Вертикальная точка, в которой камера находится в особом внимании, в пикселях, заданных как положительный десятичный скаляр. Фокусное расстояние по умолчанию изменяется в зависимости от того, куда вы помещаете датчик в автомобиль, оборудованный датчиком. |
| Image Width | Горизонтальное разрешение камеры, в пикселях, заданных как положительное целое число. Значение по умолчанию: |
| Image Height | Вертикальное разрешение камеры, в пикселях, заданных как положительное целое число. Значение по умолчанию: |
| Principal Point X | Горизонтальный центр изображения, в пикселях, заданных как положительный десятичный скаляр. Значение по умолчанию: |
| Principal Point Y | Вертикальный центр изображения, в пикселях, заданных как положительный десятичный скаляр. Значение по умолчанию: |
Чтобы просмотреть все параметры обнаружения камеры в приложении, расширьте Sensor Limits, Lane Settings и разделы Accuracy & Noise Settings.
| Параметр | Описание |
|---|---|
| Detection Type | О типе обнаружений сообщает камера, заданная как одно из этих значений:
Значение по умолчанию: |
| Detection Probability | Вероятность, что камера обнаруживает объект, заданный как десятичный скаляр в области значений (0, 1]. Значение по умолчанию: |
| False Positives Per Image | О количестве ложных положительных сторон сообщают на интервал обновления, заданный как неотрицательный десятичный скаляр. Это значение должно быть меньше чем или равно максимальному количеству обнаружений, заданных в параметре Limit # of Detections. Значение по умолчанию: |
| Limit # of Detections | Выберите этот параметр, чтобы ограничить количество одновременных обнаружений объектов, о которых сообщает датчик. Задайте Limit # of Detections как положительное целое число меньше чем 263. Чтобы включить этот параметр, установите параметр Detection Type на Значение по умолчанию: 'off' |
| Detection Coordinates | Система координат выходных местоположений обнаружения, заданных как одно из этих значений:
Значение по умолчанию: |
Пределы датчика
| Параметр | Описание |
|---|---|
| Max Speed (m/s) | Самая быстрая относительная скорость, на которой камера может обнаружить объекты, в метрах в секунду, заданный как неотрицательный десятичный скаляр. Значение по умолчанию: |
| Max Range (m) | Самое дальнее расстояние, на котором камера может обнаружить объекты, в метрах, заданных как положительный десятичный скаляр. Значение по умолчанию: |
| Max Allowed Occlusion | Максимальный процент объекта, который может быть блокирован, все еще будучи обнаруженным, задал как десятичный скаляр в области значений [0, 1). Значение по умолчанию: |
| Min Object Image Width | Минимальный горизонтальный размер объектов, которые камера может обнаружить, в пикселях, заданных как положительный десятичный скаляр. Значение по умолчанию: |
| Min Object Image Height | Минимальный вертикальный размер объектов, которые камера может обнаружить, в пикселях, заданных как положительный десятичный скаляр. Значение по умолчанию: |
Настройки маршрута
| Параметр | Описание |
|---|---|
| Lane Update Interval (ms) | Частота, на которой датчик обновляет обнаружения маршрута, в миллисекундах, заданных как десятичный скаляр. Значение по умолчанию: |
| Min Lane Image Width | Минимальный горизонтальный размер объектов, которые датчик может обнаружить, в пикселях, заданных как десятичный скаляр. Чтобы включить этот параметр, установите параметр Detection Type на Значение по умолчанию: |
| Min Lane Image Height | Минимальный вертикальный размер объектов, которые датчик может обнаружить, в пикселях, заданных как десятичный скаляр. Чтобы включить этот параметр, установите параметр Detection Type на Значение по умолчанию: |
| Boundary Accuracy | Точность, с которой датчик помещает контур маршрута, в пикселях, заданных как десятичный скаляр. Чтобы включить этот параметр, установите параметр Detection Type на Значение по умолчанию: |
| Limit # of Lanes | Выберите этот параметр, чтобы ограничить количество обнаружений маршрута, о которых сообщает датчик. Задайте Limit # of Lanes как положительное целое число. Чтобы включить этот параметр, установите параметр Detection Type на Значение по умолчанию: 'off' |
Accuracy & Noise Settings
| Параметр | Описание |
|---|---|
| Bounding Box Accuracy | Позиционный шум, используемый в подборе кривой ограничительным рамкам к целям, в пикселях, заданных как положительный десятичный скаляр. Значение по умолчанию: |
| Process Noise Intensity (m/s^2) | Шумовая интенсивность, используемая в сглаживании положения и скоростных измерений, в метрах в секунду, придала квадратную форму, заданный как положительный десятичный скаляр. Значение по умолчанию: |
| Has Noise | Выберите этот параметр, чтобы позволить добавить шум в измерения датчика. Значение по умолчанию: 'off' |
Sensors (Radar) — Радарное размещение датчика и параметры обнаруженияЧтобы получить доступ к этим параметрам, добавьте по крайней мере один радарный датчик в сценарий.
На панели инструментов приложения нажмите Add Radar.
На вкладке Sensors выберите датчик из списка. Значения параметров изменяются на основе датчика, который вы выбираете.
| Параметр | Описание |
|---|---|
| Enabled | Включите или отключите выбранный датчик. Выберите этот параметр, чтобы собрать данные о датчике в процессе моделирования и визуализировать те данные в панели Bird's-Eye Plot. |
| Name | Имя датчика. |
| Update Interval (ms) | Частота, на которой датчик обновляется, в миллисекундах, заданных как целочисленное кратное шаг расчета приложения, заданный под Settings, в параметре Sample Time (ms). Значение Update Interval (ms) по умолчанию Если вы обновляете шаг расчета приложения, таким образом, что датчик больше не является кратным шагу расчета приложения, приложение предлагает вам с опцией автоматически обновлять параметр Update Interval (ms) к самому близкому целому числу несколько. Значение по умолчанию: |
| Type | Тип датчика, заданного или как Radar для радарных датчиков или как Vision для датчиков камеры. |
| Параметр | Описание |
|---|---|
| X (m) | X- положение оси датчика в системе координат транспортного средства, в метрах, заданных как десятичный скаляр. X - ось указывает вперед от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Y (m) | Y- положение оси датчика в системе координат транспортного средства, в метрах, заданных как десятичный скаляр. Y - ось указывает слева от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Height (m) | Высота датчика над землей, в метрах, заданных как положительный десятичный скаляр. Значение по умолчанию: |
| Roll | Угол ориентации датчика о его X - ось, в градусах, заданный как десятичный скаляр. Roll по часовой стрелке положителен при взгляде в прямом направлении X - ось, которая указывает вперед от датчика. Значение по умолчанию: |
| Pitch | Угол ориентации датчика о его Y - ось, в градусах, заданный как десятичный скаляр. Pitch по часовой стрелке положителен при взгляде в прямом направлении Y - ось, которая указывает слева от датчика. Значение по умолчанию: |
| Yaw | Угол ориентации датчика о его Z - ось, в градусах, заданный как десятичный скаляр. Yaw по часовой стрелке положителен при взгляде в прямом направлении Z - ось, которая подчеркивает от земли. Однако Sensor Canvas имеет перспективу вида с высоты птичьего полета, которая смотрит в обратном направлении Z - ось. Поэтому при просмотре зон охвата датчика на этом холсте, Yaw против часовой стрелки положителен. |
Чтобы просмотреть все радарные параметры обнаружения в приложении, расширьте разделы Accuracy & Noise Settings и Advanced Parameters.
| Параметр | Описание |
|---|---|
| Detection Probability | Вероятность, что радар обнаруживает объект, заданный как десятичный скаляр в области значений (0, 1]. Значение по умолчанию: |
| False Alarm Rate | Вероятность ложного обнаружения на уровень разрешения, заданный как десятичный скаляр в области значений [ Значение по умолчанию: |
| Field of View Azimuth | Горизонтальное поле зрения радара, в градусах, заданный как положительный десятичный скаляр. Значение по умолчанию: |
| Field of View Elevation | Вертикальное поле зрения радара, в градусах, заданный как положительный десятичный скаляр. Значение по умолчанию: |
| Max Range (m) | Самое дальнее расстояние, на котором радар может обнаружить объекты, в метрах, заданных как положительный десятичный скаляр. Значение по умолчанию: |
| Range Rate Min, Range Rate Max | Выберите этот параметр, чтобы установить минимальные и максимальные ограничения скорости области значений для радара. Задайте Range Rate Min и Range Rate Max как десятичные скаляры в метрах в секунду, где Range Rate Min меньше Range Rate Max. Значение по умолчанию (Min): Значение по умолчанию (Max): |
| Has Elevation | Выберите этот параметр, чтобы позволить радару измерить вертикальное изменение объектов. Этот параметр включает параметры вертикального изменения в разделе Accuracy & Noise Settings. Значение по умолчанию: 'off' |
| Has Occlusion | Выберите этот параметр, чтобы включить радар к поглощению газов модели. Значение по умолчанию: на |
Усовершенствованные параметры
| Параметр | Описание |
|---|---|
| Reference Range | Диапазон ссылки для данной вероятности обнаружения, в метрах, заданных как положительный десятичный скаляр. reference range является областью значений, в которой радар обнаруживает цель размера, заданного Reference RCS, учитывая вероятность обнаружения, заданного Detection Probability. Значение по умолчанию: |
| Reference RCS | Ссылочный RCS для данной вероятности обнаружения, в децибелах на квадратный метр, заданный как неотрицательный десятичный скаляр. reference RCS является целевым размером, в котором радар обнаруживает цель, учитывая диапазон ссылки, указанный Reference Range и вероятностью обнаружения, заданного Detection Probability. Значение по умолчанию: |
| Limit # of Detections | Выберите этот параметр, чтобы ограничить количество одновременных обнаружений, о которых сообщает датчик. Задайте Limit # of Detections как положительное целое число меньше чем 263. Значение по умолчанию: 'off' |
| Detection Coordinates | Система координат выходных местоположений обнаружения, заданных как одно из этих значений:
Значение по умолчанию: |
Accuracy & Noise Settings
| Параметр | Описание |
|---|---|
| Azimuth Resolution | Минимальное разделение в углу азимута, под которым радар может различать две цели, в градусах, заданный как положительный десятичный скаляр. Разрешение азимута обычно - 3 дБ downpoint в угловой ширине луча азимута радара. Значение по умолчанию: |
| Azimuth Bias Fraction | Максимальная точность азимута радара, заданного как неотрицательный десятичный скаляр. Смещение азимута выражается как часть разрешения азимута, заданного параметром Azimuth Resolution. Модули являются безразмерными. Значение по умолчанию: |
| Elevation Resolution | Минимальное разделение в углу вертикального изменения, под которым радар может различать две цели, в градусах, заданный как положительный десятичный скаляр. Разрешение вертикального изменения обычно - 3 дБ downpoint в угловой ширине луча вертикального изменения радара. Чтобы включить этот параметр, в разделе Detection Parameters, выбирают параметр Has Elevation. Значение по умолчанию: |
| Elevation Bias Fraction | Максимальная точность вертикального изменения радара, заданного как неотрицательный десятичный скаляр. Смещение вертикального изменения выражается как часть разрешения вертикального изменения, заданного параметром Elevation Resolution. Модули являются безразмерными. Чтобы включить этот параметр, под Detection Parameters, выбирают параметр Has Elevation. Значение по умолчанию: |
| Range Resolution | Минимальное разделение области значений, при котором радар может различать две цели, в метрах, заданных как положительный десятичный скаляр. Значение по умолчанию: |
| Range Bias Fraction | Максимальная точность области значений радара, заданного как неотрицательный десятичный скаляр. Смещение области значений выражается как часть разрешения области значений, заданного в параметре Range Resolution. Модули являются безразмерными. Значение по умолчанию: |
| Range Rate Resolution | Минимальное разделение уровня области значений, при котором радар может различать две цели, в метрах в секунду, заданный как положительный десятичный скаляр. Чтобы включить этот параметр, в разделе Detection Parameters, выбирают параметр Range Rate Min, Range Rate Max и устанавливают значения уровня области значений. Значение по умолчанию: |
| Range Rate Bias Fraction | Максимальная точность уровня области значений радара, заданного как неотрицательный десятичный скаляр. Смещение уровня области значений выражается как часть разрешения уровня области значений, заданного в параметре Range Rate Resolution. Модули являются безразмерными. Чтобы включить этот параметр, под разделом Detection Parameters, выбирают параметр Range Rate Min, Range Rate Max и устанавливают значения уровня области значений. Значение по умолчанию: |
| Has Noise | Выберите этот параметр, чтобы позволить добавить шум в измерения датчика. Значение по умолчанию: 'off' |
| Has False Alarms | Выберите этот параметр, чтобы включить ложные предупреждения в обнаружениях датчика. Значение по умолчанию: 'off' |
Settings — Шаг расчета симуляции, остановите условие и время остановкиЧтобы получить доступ к этим параметрам, на панели инструментов приложения, нажимают Settings.
| Параметр | Описание |
|---|---|
| Sample Time (ms) | Частота, на которой симуляция обновляется в миллисекундах. Увеличьте шаг расчета, чтобы ускорить симуляцию. Это увеличение не оказывает влияния на скорости агента, даже при том, что агенты, может казаться, идут быстрее в процессе моделирования. Положения агента только производятся и отображаются на приложении в менее частых интервалах, приводя к более быстрым, более изменчивым анимациям. Уменьшение результатов шага расчета в более сглаженных анимациях, но агентов, кажется, перемещается медленнее, и симуляция занимает больше времени. Шаг расчета не коррелирует к фактическому времени. Например, если выборки приложения каждую 0.1 секунды (Sample Time (ms) = Значение по умолчанию: |
| Stop Condition | Остановите условие симуляции, заданной как одно из этих значений:
Значение по умолчанию: |
| Stop Time (s) | Время остановки симуляции, в секундах, заданных как положительный десятичный скаляр. Чтобы включить этот параметр, установите параметр Stop Condition на Значение по умолчанию: |
| Use RNG Seed | Выберите этот параметр, чтобы использовать seed генератора случайных чисел (RNG), чтобы воспроизвести те же результаты для каждой симуляции. Задайте seed RNG как неотрицательное целое число меньше чем 232. Значение по умолчанию: 'off' |
Евро ограничения NCAP
Сценарии систем помощи скорости (SAS) не поддержаны. Эти сценарии требуют обнаружения ограничений скорости от дорожных знаков, которые не поддерживает приложение.
Ограничения OpenDRIVE
Можно импортировать только маршруты, информацию о типе маршрута и дороги. Импорт дорожных объектов и сигналов трафика не поддержан.
Файлы OpenDRIVE, содержащие большие дорожные сети, могут взять до нескольких минут, чтобы загрузить. Кроме того, эти дорожные сети могут вызвать медленные взаимодействия на холсте приложения. Примеры больших дорожных сетей включают единицы, которые моделируют дороги города или единиц с дорогами, которые являются тысячами метров долго.
Маршруты с переменными ширинами не поддержаны. Ширина установлена в самую высокую ширину, найденную в том маршруте. Например, если маршрут имеет ширину, которая варьируется от 2 метров до 4 метров, приложение устанавливает ширину маршрута на 4 метра повсюду.
Дороги с маршрутом вводят информацию, указанную как driving'Граница' , restricted, shoulder, и parking поддерживаются. Маршруты с любой другой информацией о типе маршрута импортируются как маршруты границы.
Дороги с несколькими стилями маркировки маршрута не поддержаны. Приложение применяет первую найденную маркировку стиля ко всем маршрутам на дороге. Например, если дорога имеет Dashed и Solid маркировки маршрута, приложение применяет Dashed маркировки маршрута повсюду.
Маршрут, отмечающий стили Bott Dots, Curbs, и Grass не поддержаны. Маршруты с этими стилями маркировки импортируются как не отмеченные.
Можно отменить (нажмите Ctrl+Z), и восстановление (нажимают Ctrl+Y) изменения вы делаете на холстах датчика и сценарии. Например, можно использовать эти ярлыки, чтобы удалить недавно размещенный дорожный центр или восстановить перемещение радарного датчика.
[1] Европейская новая автомобильная программа оценки. Евро протокол оценки NCAP - SA. Версия 8.0.2. Январь 2018.
[2] Европейская новая автомобильная программа оценки. Евро тестовый протокол NCAP AEB C2C. Версия 2.0.1. Январь 2018.
[3] Европейская новая автомобильная программа оценки. Евро тестовый протокол NCAP LSS. Версия 2.0.1. Январь 2018.
[4] Дюпюи, Мариус, и др. Спецификация Формата OpenDRIVE. Версия 1.4, Выпуск H, Документ № VI2014.106. Бад-Айблинг, Германия: VIRES Simulationstechnologie GmbH, 4 ноября 2015.
Bird ' s-Eye Scope | Radar Detection Generator | Scenario Reader | Vision Detection Generator | drivingScenario | radarDetectionGenerator | visionDetectionGenerator
