Прогнозирующий контроллер модели требует, чтобы следующее отклонило неизвестные воздействия эффективно:
Специализированные возмущения
Обратная связь измерения, чтобы обновить контроллер утверждает оценки
Можно изменить возмущения ввода и вывода и модель шума измерения с помощью приложения MPC Designer и в командной строке. Можно затем настроить контроллер, настраивающий веса, чтобы улучшить подавление помех.
MPC пытается предсказать, как известные и неизвестные события влияют на выходные переменные объекта (OVs). Известные события являются изменениями в измеренных входных переменных объекта (мВ и входные параметры MD). Модель объекта управления контроллера предсказывает удар этих событий, и такие прогнозы могут быть довольно точными. Для получения дополнительной информации смотрите, что MPC Моделирует.
Удары неизвестных событий появляются как ошибки в прогнозах известных событий. Эти ошибки, по определению, невозможно предсказать точно. Однако способность ожидать тренды может улучшить подавление помех. Например, предположите, что система управления действовала при почти устойчивом условии со всеми, измерил OVs около их ожидаемых значений. Нет никаких известных событий, но один или несколько из этих OVs внезапно отклоняется от его прогноза. Воздействие контроллера и модели шума измерения позволяют вам давать представление о том, как обработать такие ошибки.
Предположим, что ваша модель объекта управления не включает неизмеренных входных параметров воздействия. Контроллер MPC затем модели неизвестные события с помощью выходного возмущения. Как показано в Моделировании MPC, выходное возмущение независимо от объекта, и его выход добавляет непосредственно к той из модели объекта управления.
Используя MPC Designer, можно задать тип шума, который, как ожидают, будет влиять на каждый объект OV. В приложении, на вкладке Tuning, в разделе Design, нажимают Estimation Models> Output Disturbance Model. В диалоговом окне Output Disturbance Model, в Update the model выпадающий список, выбирают specifying a custom model channel by channel.
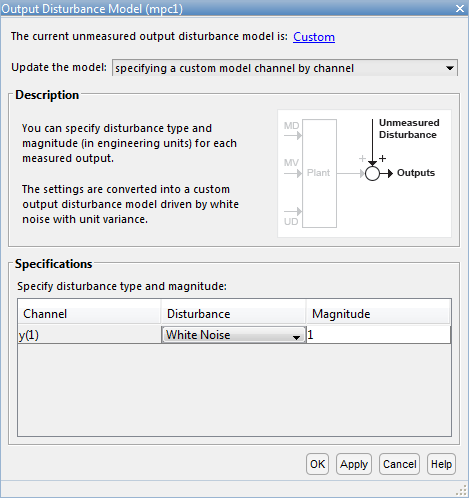
В разделе Specifications, в столбце Disturbance, избранном одном из следующих возмущений для каждого выхода:
White Noise — Ошибки прогноза происходят из-за случайного нулевого среднего белого шума. Эта опция подразумевает, что удар воздействия является недолгим, и поэтому требует скромного, краткосрочного ответа контроллера.
Random Step-like — Ошибки прогноза происходят из-за случайного подобного шагу воздействия, которое длится неопределенно, обеспечивая примерно постоянную величину. Такое воздействие требует более агрессивного, длительного ответа контроллера.
Random Ramp-like — Ошибки прогноза происходят из-за случайного подобного пандусу воздействия, которое длится неопределенно и имеет тенденцию расти со временем. Такое воздействие требует еще более агрессивного ответа контроллера.
Программное обеспечение Model Predictive Control Toolbox™ представляет каждый тип воздействия как модель, в которую белый шум, с нулевым средним значением и модульным отклонением, вводит динамическую систему SISO, состоящую из одного из следующего:
Статическое усиление — Для белого шумового воздействия
Интегратор последовательно со статическим усилением — Для подобного шагу воздействия
Два интегратора последовательно со статическим усилением — Для подобного пандусу воздействия
Можно также задать белый шумовой вход Magnitude для каждого возмущения, заменив предположение о модульном отклонении. Когда вы увеличиваете шумовую величину, контроллер более настойчиво отвечает на данную ошибку прогноза. Заданная шумовая величина соответствует статическому усилению в модели SISO для каждого типа шума.
Можно также просмотреть или изменить выходное возмущение из командной строки с помощью getoutdist и setoutdist соответственно.
MPC также пытается отличить воздействия, которые требуют ответа контроллера от шума измерения, который должен проигнорировать контроллер. Используя MPC Designer, можно задать ожидаемую величину шума измерения и символ. В приложении, на вкладке Tuning, в разделе Design, нажимают Estimation Models> Measurement Noise Model. В диалоговом окне Model Noise Model, в Update the model выпадающий список, выбирают specifying a custom model channel by channel.
В разделе Specifications, в столбце Disturbance, выбирают шумовую модель для каждого измеренного выходного канала. Шумовые опции совпадают с выходными опциями возмущения.
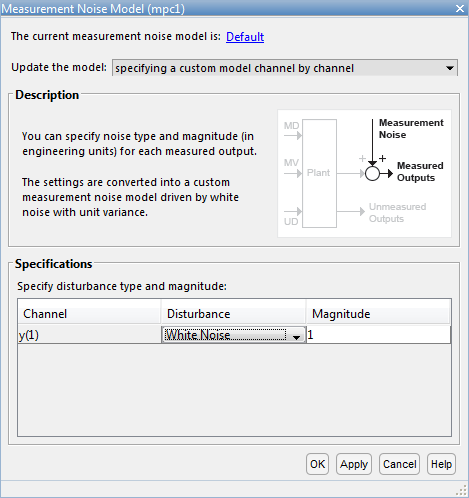
White Noise опция по умолчанию и, почти во всех приложениях, должна обеспечить соответствующую производительность.
Когда вы включаете модель шума измерения, диспетчер рассматривает каждую ошибку прогноза быть комбинацией воздействия и шумовых эффектов. Качественно, когда вы увеличиваете заданный шумовой Magnitude, контроллер приписывает большую часть каждой ошибки прогноза к шуму, и это отвечает менее настойчиво. В конечном счете контроллер прекращает отвечать на ошибки прогноза и только изменяет его MVS, когда вы изменяете OV или сигналы ссылки мВ.
Когда ваша модель объекта управления включает входные параметры неизмеренного воздействия (UD), диспетчер может использовать input disturbance model в дополнение к возмущению стандартного вывода. Первый обеспечивает больше гибкости и сгенерирован автоматически по умолчанию. Если выбранное входное возмущение, кажется, не позволяет полное устранение длительных воздействий, выходное возмущение также добавляется по умолчанию.
Как показано в Моделировании MPC, входное возмущение состоит из одного или нескольких белых шумовых сигналов, с модульным отклонением и нулевым средним значением, вводя динамическую систему. Выходные параметры этой системы являются входными параметрами UD к модели объекта управления. В отличие от выходного возмущения, входные воздействия влияют на объект выходные параметры более комплексным способом, когда они проходят через динамику модели объекта управления.
Как с выходным возмущением, можно использовать MPC Designer, чтобы задать тип воздействия, которое вы ожидаете для каждого входа UD. В приложении, на вкладке Tuning, в разделе Design, нажимают Estimation Models> Input Disturbance Model. В диалоговом окне Input Disturbance Model, в Update the model выпадающий список, выбирают specifying a custom model channel by channel.
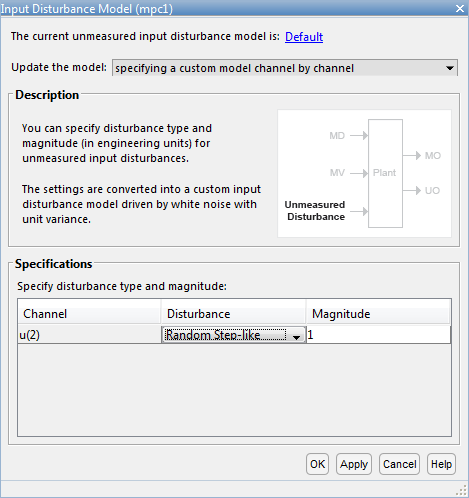
В разделе Specifications, в столбце Disturbance, выбирают шумовую модель для каждого измеренного выходного канала. Входные опции возмущения совпадают с выходными опциями возмущения.
Общий подход должен смоделировать неизвестные события как воздействия, добавляющие к MVS объекта. Эти воздействия, которые называют load disturbances во многих текстах, реалистичны в этом, некоторые неизвестные события являются отказами установить MVS на значения, которые требует контроллер. Можно создать возмущение загрузки можно следующим образом:
Начните с модели объекта управления LTI, Plant, в котором все входные параметры известны (MVS и MDS).
Получите матрицы пространства состояний Plant. Например:
[A,B,C,D] = ssdata(Plant);
Предположим, что существует MVS nu. Установите Bu = столбцы B, соответствующего MVS. Кроме того, установите Du = столбцы D, соответствующего MVS.
Переопределите модель объекта управления, чтобы включать nu дополнительные входные параметры. Например:
Plant.B = [B Bu]; Plant.D = [D Du]);
Чтобы указать, что новые входные параметры являются неизмеренными воздействиями, используйте setmpcsignals, или набор Plant.InputGroup свойство.
Эта процедура добавляет входные параметры воздействия загрузки, не увеличивая число состояний в модели объекта управления.
По умолчанию, учитывая модель объекта управления, содержащую воздействия загрузки, программное обеспечение Model Predictive Control Toolbox создает входное возмущение, которое генерирует nym подобные шагу воздействия загрузки. Если nym> nu, это также создает выходное возмущение с интегрированным белым шумом, добавляющим к (nym – nu) измерил выходные параметры. Если nym <nu, последнее (nu – nym) воздействия загрузки являются нулем по умолчанию. Можно изменить эти значения по умолчанию с помощью MPC Designer.
Можно также просмотреть или изменить входное возмущение из командной строки с помощью getindist и setindist соответственно.
Как обсуждено в Оценке состояния Контроллера, объект, воздействие и шумовые модели объединяются, чтобы сформировать наблюдателя состояния, который должен быть обнаруживаемым использованием измеренного объекта выходные параметры. В противном случае программное обеспечение отображает сообщение об ошибке командного окна, когда вы пытаетесь использовать контроллер.
Это ограничение ограничивает форму воздействия и шумовых моделей. Если какие-либо модели заданы, когда что-либо кроме белого шума со статическим усилением, их состояния модели должны быть обнаруживаемыми. Например, интегрированное белое шумовое воздействие, добавляющее к неизмеренному OV, было бы необнаруживаемым. MPC Designer препятствует тому, чтобы вы выбрали такую модель. Точно так же количество измеренных воздействий, nym, ограничивает количество подобных шагу входных параметров UD от входного возмущения.
По умолчанию программное обеспечение Model Predictive Control Toolbox создает обнаруживаемые модели. Если вы изменяете предположения по умолчанию (или измените nym), и столкнитесь с ошибкой обнаружительной способности, можно вернуться к случаю по умолчанию.
Во время процесса проектирования можно настроить свойства подавления помех контроллера.
Перед любым контроллером, настраивающимся, задайте масштабные коэффициенты для каждой переменной ввода и вывода объекта (см., Задают Масштабные коэффициенты). В контексте воздействия и шумового моделирования, это делает предположение по умолчанию о модульном отклонении, которое белый шум вводит более вероятно, чтобы дать к хорошей производительности.
Первоначально, сохраните возмущения в их настройке по умолчанию.
После настройки весов функции стоимости (см. Веса Мелодии), протестируйте свой ответ контроллера на неизмеренный вход воздействия кроме воздействия шага на объекте выход. А именно, если ваша модель объекта управления включает входные параметры UD, симулируйте воздействие с помощью одного или нескольких из них. В противном случае симулируйте одно или несколько воздействий загрузки, то есть, воздействие шага, добавленное к обозначенному мВ. И MPC Designer и sim поддержка команды такие симуляции.
Если ответ в симуляциях слишком вял, попробуйте один или несколько следующих, чтобы произвести более агрессивное подавление помех:
Увеличьте все усиления возмущения на мультипликативный фактор. В MPC Designer сделайте это путем увеличения величины каждого воздействия. Если это помогает, но недостаточно, увеличьте величину далее.
Уменьшите усиления шума измерения мультипликативным фактором. В MPC Designer сделайте это путем увеличения величины шума измерения. Если это помогает, но недостаточно, увеличьте величину далее.
В MPC Designer, во вкладке Tuning, перетаскивают ползунок State Estimation направо. Движение оценки состояния Faster одновременно увеличивает усиления для возмущений и уменьшает усиления для шумовых моделей.
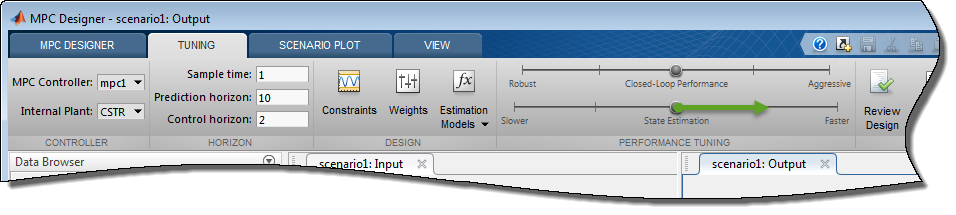
Если это помогает, но недостаточно, перетащите ползунок далее направо.
Измените одно или несколько воздействий, чтобы смоделировать, который требует более агрессивного ответа контроллера. Например, измените модель от белого шумового воздействия до подобного шагу воздействия.
Изменение воздействий таким образом добавляет состояния в возмущение, которое может вызвать нарушения ограничения обнаружительной способности наблюдателя состояния.
Если ответ слишком агрессивен, и, в частности, если контроллер не устойчив, когда его прогноз известных событий неточен, попытайтесь инвертировать предыдущие корректировки.
