Преобразуйте глобальную переменную в локальные координаты
lclCoord = global2localcoord(gCoord, OPTION)
gCoord = global2localcoord(___,localOrigin)
gCoord = global2localcoord(___,localAxes)
lclCoord = global2localcoord(gCoord, OPTION)gCoord к локальным координатам lclCoord. OPTION определяет тип преобразования глобальной переменной к локальной координате. В этом синтаксисе источник глобальной координаты расположен в (0,0,0), и оси координат являются единичными векторами в x, y и направлениях z.
gCoord = global2localcoord(___,localOrigin)localOrigin.
gCoord = global2localcoord(___,localAxes)localAxes.
|
Глобальные координаты в прямоугольной или сферической координате, заданной как 3 N матрицей. Каждый столбец представляет один набор глобальных координат. Если координаты находятся в прямоугольной форме, каждый столбец содержит (x, y, z) компоненты. Модули исчисляются в метрах. Если координаты находятся в сферической форме, каждый столбец содержит (az, el, r) компоненты. az является углом азимута в градусах, el является углом вертикального изменения в градусах, и r является радиусом в метрах. Источник глобальной системы координат принят, чтобы быть расположенным в (0, 0, 0). Глобальные системные оси являются стандартными модульными базисными векторами в 3-мерном пространстве, (1, 0, 0), (0, 1, 0), и (0, 0, 1). | ||||||||||
|
Тип координатного преобразования, заданного как вектор символов. Допустимые типы
| ||||||||||
|
Источник системы локальной координаты, заданной как 3 N матрицей, содержащей прямоугольные координаты системного источника локальной координаты относительно глобальной системы координат. N должен совпадать с количеством столбцов Значение по умолчанию: | ||||||||||
|
Оси системы локальной координаты, заданной как 3 3 N массивом. Каждая страница содержит 3х3 матрицу, представляющую различную систему локальной координаты оси. Столбцы 3х3 матриц задают локальный x, y и оси z в прямоугольной форме относительно глобальной системы координат. Однако можно задать Значение по умолчанию: |
|
Локальные координаты в форме прямоугольной или сферической координаты, возвращенной как 3 N матрицей. Размерности |
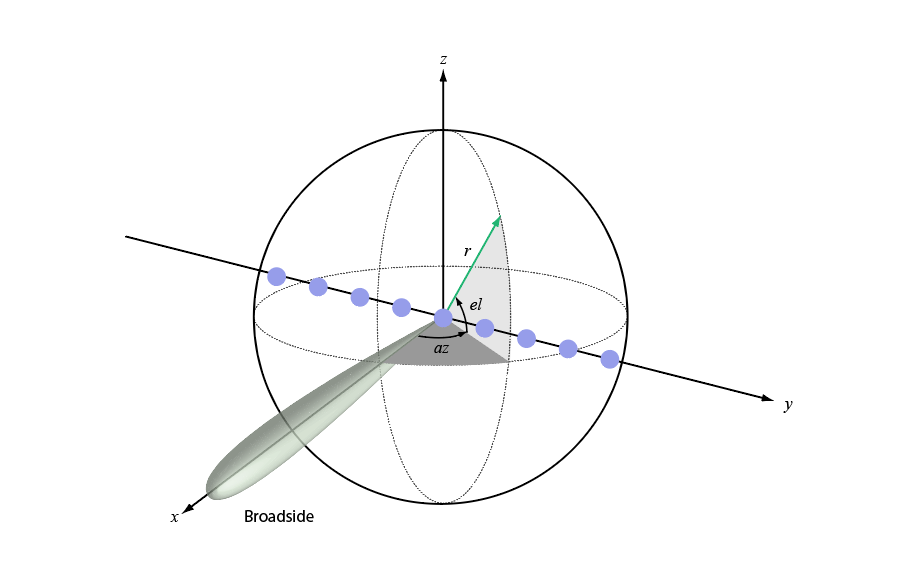
azimuth angle вектора является углом между x - ось и ортогональной проекцией вектора на плоскость xy. Угол положителен в движении от оси x к оси y. Углы азимута находятся между –180 и 180 градусами. elevation angle является углом между вектором и его ортогональной проекцией на xy - плоскость. Угол положителен при движении к положительному z - ось от плоскости xy. Эти определения принимают, что направлением опорного направления является положительный x - ось.
Угол вертикального изменения иногда задается в литературе как угол, который вектор делает с положительным z - ось. MATLAB® и продукты Phased Array System Toolbox™ не используют это определение.
Этот рисунок иллюстрирует угол азимута и угол вертикального изменения для вектора, показавшего зеленой сплошной линией. Система координат относительно центра универсальной линейной матрицы, элементы которой появляются как синие диски.
[1] Фоли, J. D. А. ван Дам, С. К. Фейнер и Дж. Ф. Хьюз. Компьютерная графика: Принципы и Практика в C, 2-м Эде. Чтение, MA: Аддисон-Уэсли, 1995.
azel2phitheta | azel2uv | local2globalcoord | phitheta2azel | rangeangle | uv2azel
