Планетарная зубчатая передача со ступенчатым механизмом планеты установлена
Simscape / Автомобильная трансмиссия / Механизмы

Блок Compound Planetary Gear представляет планетарную зубчатую передачу с составными механизмами планеты. Каждый составной механизм планеты является парой жестко соединенных и в длину расположенных механизмов различных радиусов. Один из этих двух механизмов затрагивает расположенный в центре механизм солнца, в то время как другой затрагивает внешний кольцевой механизм.
Соедините планетарный механизм
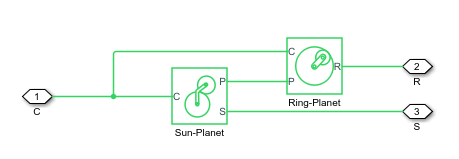
Блок моделирует составной планетарный механизм как структурное компонентно-ориентированное на Simscape™ Driveline™ блоки Ring-Planet и Sun-Planet. Рисунок показывает блок-схему этого структурного компонента.
Чтобы увеличить точность модели механизма, задайте свойства, такие как инерция механизма, запутывающие потери и вязкие потери. По умолчанию инерция механизма и вязкие потери приняты, чтобы быть незначительными. Блок позволяет вам задать инерцию внутренних механизмов планеты только. Чтобы смоделировать инерцию поставщика услуг, солнце и кольцевые механизмы, соединяют Simscape блоки Inertia с портами C, S и R.
Можно смоделировать эффекты теплового потока и изменения температуры через дополнительный тепловой порт сохранения. По умолчанию тепловой порт скрыт. Чтобы осушить тепловой порт, щелкните правой кнопкой по блоку по своей модели и, из контекстного меню, выберите Simscape> Block choices. Выберите вариант модели, который включает тепловой порт. Задайте связанные тепловые параметры для компонента.
Блок Compound Planetary Gear налагает два кинематических и два геометрических ограничения на три связанных оси и четвертое, внутреннее колесо (планета):
| r CωC = r SωS + r P1ωP, r C = r S + r P1, | (1) |
| r RωR = r CωC + r P2ωP, r R = r C + r P2. | (2) |
Передаточное отношение кольцевой планеты является RP g = r R/rP2 =, N R/NP2 и передаточное отношение солнца планеты являются PS g = r P1/rS = N P1/NS. N является количеством зубов на каждом механизме. В терминах этих отношений ключевое кинематическое ограничение:
| (1 + RP g · PS g) ω C = ω S + RP g · g PSωR. | (3) |
Эти четыре степени свободы уменьшают до двух независимых степеней свободы. Пары механизма (1,2) = (P2, R) и (S, P1).
Передаточное отношение RP g должно строго быть больше того.
Передачи крутящего момента:
| g RPτP2 + τ R – потеря τ (P2, R) = 0, g PSτS + τ P1 – потеря τ (S, P1) = 0, | (4) |
с потерей τ = 0 в идеальном случае.
В неидеальном случае, . Смотрите механизмы модели с потерями.
Механизмы приняты твердые.
Трение Кулона замедляет симуляцию. Смотрите Настраивают Точность Модели.
