Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Эта модель в качестве примера использует несколько блоков в библиотеке, чтобы симулировать простую машину с управлением с обратной связью. Вы будете видеть, как функции Simscape Multibody полагаются на стандартные функции Simulink®, чтобы смоделировать механическую систему.
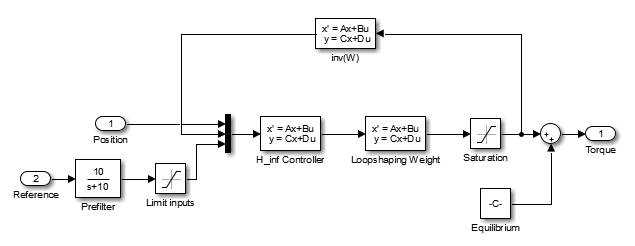
Модель в качестве примера симулирует механизм загрузки ленточного конвейера. Простой контроллер (не показанный), с датчиком и приводом, ведет механизм с пределом насыщения и антизаключительной логикой для прикладного крутящего момента. Можно настроить контроллер и установить останавливающуюся точку для толкателя.
Механизм загрузчика конвейера
Пример механизма конвейера иллюстрирует некоторые важные функции Simscape Multibody:
Представление тел и степеней свободы с Телом и Блоками соединений, соответственно
Используя Simscape Multibody блокируется с нормальными блоками Simulink
Питание Сигналов Simulink к и от Simscape Multibody блокируется с блоками Привода и Датчика, соответственно
Инкапсуляция групп блоков в подсистемы
Визуализация и анимация механизма его телами компонента
Вы можете хотеть сделать модификации к этой модели в качестве примера. Избегать ошибок,
Не пытайтесь соединить линии Сигнала Simulink непосредственно с блоками Simscape Multibody кроме Приводов и Датчиков.
Сохраните словосочетание источников системы координат Тела по обе стороны от каждого собранного Соединения к в допусках блока.
Сохранение модифицированных моделей в качестве примера в различной папке из примеров рекомендуется.
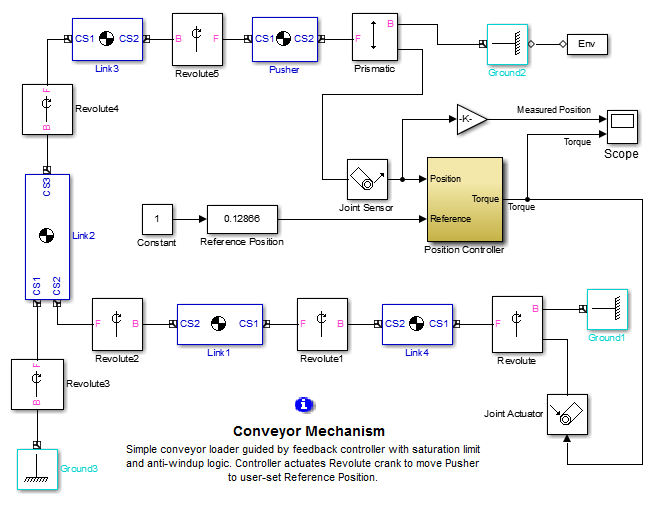
Следующий рисунок показывает подробный схематический из механизма загрузки ленточного конвейера.
Чтобы начать быстро с моделью конвейера в качестве примера, выполните любой из этих шагов:
Введите mech_conveyor в командной строке MATLAB®.
Если вы работаете с Браузером документации MATLAB, кликните по имени модели mech_conveyor здесь.
Модель блок-схемы открывается в окне модели.
Вот некоторые критические функции модели:
Проигнорируйте Контроллер Положения, Объединенный Датчик, и Объединенный Привод блокируется на мгновение. Обратите внимание на то, что механизм загрузки следует за деревом тел и показанных на рисунке соединений, Механизм Загрузчика Конвейера:
Существует четыре вращающихся тела ссылки и один скользящий корпус толкателя, а также три наземных точки на неподвижном монтировании, представленном Наземными блоками. Дважды кликните блоки Тела и Земли, чтобы видеть их диалоговые окна.
Слайды толкателя и ссылки вращаются друг относительно друга и к наземным точкам на монтировании. Существует семь очевидных степеней свободы (число степеней свободы) в системе, представленной семью Соединениями, но геометрия ограничивает движение в одну фактическую степень свободы. Дважды кликните Вращательные блоки, чтобы видеть, как вращательные степени свободы выражаются в их диалоговых окнах.
Блок Prismatic выражает линейное движение Толкателя относительно Ground_2. Блок Revolute выражает угловое движение Link4 (заводная рукоятка целого механизма) относительно Ground_1.
Объединенный Датчик обнаруживает положение Толкателя через блок Prismatic. Объединенный Привод применяет крутящий момент к Link4 через блок Revolute. Дважды кликните блоки Датчика и Привода, чтобы просмотреть, как механические движения и силы/крутящие моменты преобразовываются в Сигналы Simulink.
Подсистема контроллера Положения преобразует информацию о положении Толкателя в сигнал обратной связи привести в движение Вращательный и таким образом Link4. Можно открыть блок Position Controller, чтобы просмотреть эту подсистему, которая сделана из нормальных блоков Simulink.
Блок Reference Position дает вам контроль над останавливающимся положением толкателя путем модуляции управляющего сигнала, который приводит в движение Вращательный. Поддержание начального положения толкателя требует фиксированного крутящего момента на Вращательном.
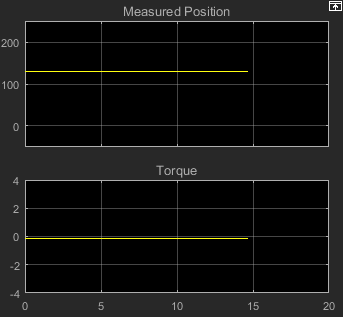
Откройте блок Scope. Можно просмотреть обоих положение Толкателя в миллиметрах (mm) относительно Ground_2, когда Измеренный график Положения и крутящий момент в ньютон-метрах (N-m) применились к Link4 относительно Ground_1 как график Крутящего момента.
Можно теперь запустить модель, как это - когда вы сначала открываете его:
В меню Simulation выберите Configuration Parameters. Диалоговое окно Configuration Parameters появляется. Выберите узел Solver:
Предварительной установкой Stop time является inf, таким образом, симуляция продолжает бежать, если вы запускаете ее. Необходимо оставить его в inf и остановите симуляцию вручную первые несколько раз, вы запускаете ее.
Позже можно применить конечное время остановки (в секундах), если вы хотите.
Оставьте записи Solver options в значениях по умолчанию и закройте поле.
В меню Simulation выберите Start. В Microsoft Windows® можно также нажать кнопку Start на панели инструментов окна модели.
Измеренное положение толкателя и крутящего момента, примененного, чтобы поддержать то положение, запускается и остается чрезвычайно постоянным в графиках Осциллографа. Прикладной крутящий момент настроен, чтобы поддержать начальное положение толкателя.
Чтобы видеть, что большая деталь при симуляции запускается, остановите симуляцию, прежде чем время передаст 20 секунд, и увеличьте масштаб графиков Осциллографа.
Вот модификация примера, который можно попробовать. Это иллюстрирует простой контроллер, который можно настроить, чтобы изменить движение толкателя.
Чтобы сделать эти модификации, лучше закрывать и перезапускать пример.
Блок Reference Position является на самом деле блоком Simulink Slider Gain (от Математической Библиотеки Simulink) и управляет, где толкатель останавливается.
Можно настроить блок Reference Position, чтобы измениться, где толкатель останавливается:
Откройте блок Reference Position. Вы видите корректируемый ползунок, чтобы установить положение точки отдыха толкателя.
Введите значения в поля Low и High, чтобы установить нижние и верхние пределы позволенной области значений ползунка. Значениями по умолчанию в этом примере является 0 и 0.2, с подразумеваемыми модулями метров (m).
Введите значение в центральное поле, чтобы установить точку остановки толкателя, которую можно также настроить путем перетаскивания ползунка между нижними и верхними пределами. Значением по умолчанию является 0 (метры).
Можно применить изменения в ссылочном положении к симуляции двумя способами:
Сбросьте блок Reference Position сначала, затем запустите пример. Вы видите дорожку траектории толкателя по-другому теперь к новой точке остановки.
Запустите пример с блоком Reference Position открывают и перемещают ползунок вверх и вниз, когда симуляция запускается. См. Осциллограф. Измеренное положение и необходимый крутящий момент изменяются, чтобы следовать за новым ссылочным положением.
Другая модификация, которую можно сделать, иллюстрирует мощную функцию Simscape Multibody, визуализацию механизма и анимацию его симулированного движения.
Можно визуализировать и анимировать механизм конвейера путем открытия окна визуализации Simscape Multibody. Это окно позволяет вам отобразить тела в двух стандартных абстрактных формах:
Эквивалентные эллипсоиды используют тензоры инерции и массы тел. Каждое тело имеет уникальный гомогенный эллипсоид, эквивалентный ему в тензоре инерции и массе.
Выпуклые оболочки используют присоединенные системы координат Тела (CSS) тел, чтобы задать форму, обрисованную в общих чертах источниками CS.
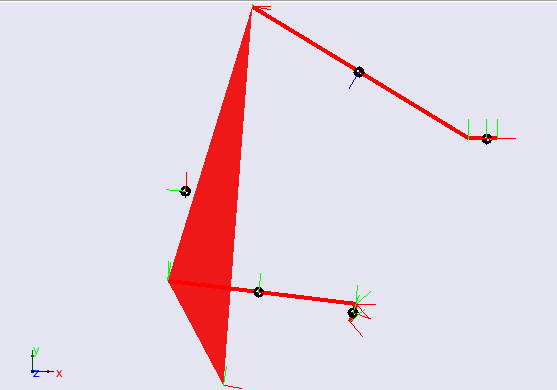
Сначала попытайтесь визуализировать конвейер с телами, отображенными как выпуклые оболочки:
В меню Simulation выберите Model Configuration Parameters. Диалоговое окно Configuration Parameters появляется.
Выберите узел Simscape Multibody 1G. В области Visualization установите флажки Display machines after updating diagram и Show animation during simulation.
Оставьте другие значения по умолчанию, как они - и закрывают диалоговое окно. В меню Edit выберите Update Diagram.
Окно визуализации Simscape Multibody появляется, отображая конвейер в покое в его начальном состоянии.
Тела отображены в геометрии по умолчанию как выпуклые оболочки. Тела и триады оси системы координат Тела также отображены как значения по умолчанию.
Смените Ссылочное Положение к ненулевому значению, такому как 0.1 или 0.2.
Перезапустите симуляцию. Окно анимирует конвейер в движении. Можно сравнить это движение с графиками в осциллографе.
Кликните по телу в окне визуализации. В окне модели соответствующий блок Body подсвечен в красном. Имя блока появляется в нижнем левом углу окна визуализации.
Исследуйте меню окна визуализации и панель инструментов.
Здесь, можно реконфигурировать свойства отображения: тела, триады оси CS Тела, окрашенные телом временной замены, появляются закрашенные фигуры, соединяющие CSS Тела на том же теле и ориентацию точки зрения.
Оставьте окно визуализации открытым для следующего набора шагов.
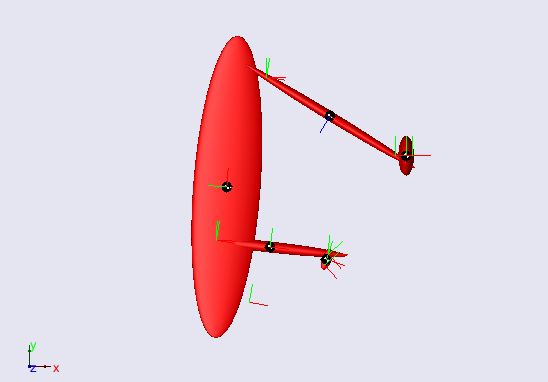
Теперь визуализируйте конвейер с телами, отображенными как эллипсоиды:
В меню Model в панели меню выберите Body Geometries > Ellipsoids, так, чтобы галочка появилась около записи меню.
Отображение в изменениях окна визуализации. Конвейер появляется в покое в его начальном состоянии, но с телами, отображенными как эквивалентные эллипсоиды.
Перезапустите симуляцию. Средство просмотра теперь анимирует конвейер в движении.
Используйте меню, чтобы экспериментировать с настройками визуализации. Панель инструментов содержит большинство этих функций также.
В то время как анимация запускается, откройте блок Reference Position и переместите ползунок вверх и вниз. В дополнение к тому, что вы видите в графиках Осциллографа, окно непосредственно анимирует траекторию толкателя на пробеле, когда механизм отвечает на вашу корректировку.
