Перечислите все кинематические переменные, сопоставленные с соединениями
jointVariables( перечисляет кинематический собственный компонент переменных ks)KinematicsSolver объект ks и доступный, чтобы получить смещения соединений.
MATLAB выводит таблицу с объединенными переменными в строках. Каждая строка дает ID переменной, тип соединения, это принадлежит, путь от корня модели к соответствующему блоку соединений в модели Simulink и модуль для его численного значения. Таблица начинается полностью заполненный со всеми объединенными переменными, идентифицированными в модели в то время KinematicsSolver объект создается.
Модель может иметь много объединенных переменных. Они сортируются по соединению, объединенному примитивному, и примитиву. Переменные соответственно называют согласно схеме jointName.primitiveType.primitiveComponent. Соединение карданова подвеса, которое имеет три вращательных примитива (Rx, Ry, и Rz), каждый с вращательным компонентом (q), допускает три объединенных переменные. С j1 для объединенного имени идентификаторы переменных становятся j1.Rx.q, j1.Ry.q, и j1.Rz.q.
Объединенные примитивы могут также быть призматическими (Px, Py, и Pz), сферический (S), постоянная скорость (CV), или ведущий винт (LSz). Примитивы могут быть переводами (p), вращения (q), и компоненты оси (ax). Сферические примитивы являются единственным, чтобы позволить вращение вокруг общей 3-D оси, и поэтому только у них есть компоненты оси. Они обозначаются ax_x, ax_y, и ax_z. Другие объединенные примитивы имеют один компонент, который каждый — сохраняет для примитивной постоянной скорости, который имеет компонент вращения азимута (q_a) и компонент вращения поворота (q_b).
Объединенные переменные могут играть различные роли в анализе. Они могут служить целями, предположениями или выходными параметрами. Как цели, они помогают задать настройку мультитела, для которой можно решить выходные переменные. Как предположения, они помогают сместить решатель к требуемому решению — например, гарантировать, что колено гуманоидного робота изгибает и расширяет только в естественной области значений 0–145 градусов. Как выходные параметры, они добавляют к неизвестным, которые будут определены решателем.
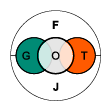
Рисунок показывает переменные общего KinematicsSolver объект. Цель (T), угадайте (G) и выведите переменные (O), может быть объединенные переменные (J) или структурировать переменные (F). Объединенные переменные являются нативными к объекту и могут быть присвоены от его запуска как цели, предположения и выходные параметры. Переменные системы координат должны сначала быть созданы с addFrameVariables.