Датчик, который измеряет пространственные отношения между двумя системами
Системы координат и преобразования
Этот блок представляет датчик, который измеряет пространственные отношения между двумя системами. Параметры, что этот датчик меры включает вращательное и поступательное положение, скорость и ускорение. Датчик может измерить эти параметры между любыми двумя системами координат в модели. Этот блок предусматривает самую широкую возможность обнаружения движения в Simscape™ Multibody™.
Каждое измерение вводит значение параметра для системы координат последователя относительно базовой системы координат, разрешенной в Measurement Frame, который вы выбираете. Системы координат измерения включают Мир, а также вращающуюся и не вращающуюся базу и последующую систему координат.
Чтобы вывести параметр, блок обеспечивает набор дополнительных портов физического сигнала. Порты остаются скрытыми, пока вы не выбираете соответствующие параметры в диалоговом окне. Каждый выходы порта параметр как изменяющийся во времени физический сигнал. По умолчанию измерения находятся в единицах СИ. При соединении с блоками Simulink® можно использовать блок PS-Simulink Converter, чтобы выбрать различную физическую единицу измерения.
Выберите систему координат, в которой можно разрешить выбранные пространственные измерения. Выбор системы координат измерения влияет на выражение векторного количества в терминах его X, Y, и компоненты Z. Некоторые количества, такие как Angle, не затронуты выбором системы координат измерения. Для получения дополнительной информации смотрите Системы координат Измерения. Значением по умолчанию является World.
Выберите параметры вращения, чтобы распознаться. Эти параметры кодируют операцию вращения, требуемую принести базовую систему координат в совпадение с системой координат последователя. Вращение наблюдает правило правой руки: с осью вращения, указывающей из экрана, против часовой стрелки, движение задает положительное вращение, в то время как по часовой стрелке движение задает отрицательное вращение.
Невекторные количества не требуют никакой системы координат измерения для разрешения; эти количества незатронуты выбором системы координат измерения. Векторные количества, такие как Axis, всегда разрешаются или в основе или в системах координат измерения последователя; World система координат измерения не применяется.
3-D угол поворота последователя структурирует относительно базовой системы координат. Выбор Angle отсоединяет порт q физического сигнала.
Векторные компоненты нормированной оси вращения. Выход является трехэлементным вектором с этими X, Y, и компонентами оси Z, разрешенными в системе координат измерения. Выбор Axis отсоединяет порт axs физического сигнала.
Модульный кватернион, который описывает чистое вращение системы координат последователя относительно базовой системы координат. Выход является четырехэлементным вектором со скаляром (S) и вектор (Vx, Vy, Vz) коэффициенты кватерниона. Вектор обеспечивает коэффициенты в порядке [S Vx Vy Vz]. Выбор Quaternion отсоединяет порт Q физического сигнала.
Преобразуйте матрицу, которая описывает чистое вращение системы координат последователя относительно базовой системы координат. Выход является с девятью элементами, 3×3 матрица. Выбор Transform отсоединяет порт R физического сигнала.
Выберите параметры скорости вращения, чтобы распознаться. Параметры кодируют скорость вращения системы координат последователя относительно базовой системы координат, разрешенной в системе координат измерения. Вращение наблюдает правило правой руки: с осью вращения, указывающей из экрана, против часовой стрелки, движение задает положительное вращение, в то время как по часовой стрелке движение задает отрицательное вращение.
Относительные скорости вращения об этих X, Y, и оси Z базовой системы координат. Выбор Omega X, Omega Y и Omega Z отсоединяет порты wx физического сигнала, wy и wz.
Модульный кватернион, который описывает скорость вращения системы координат последователя относительно базовой системы координат. Выход является четырехэлементным вектором со скаляром (S) и вектор (Vx, Vy, Vz) коэффициенты кватерниона. Вектор обеспечивает коэффициенты в порядке [S Vx Vy Vz]. Выбор Quaternion отсоединяет порт Qd физического сигнала.
Преобразуйте матрицу, которая описывает скорость вращения системы координат последователя относительно базовой системы координат. Выход является с девятью элементами, 3×3 матрица. Выбор Transform отсоединяет порт Rd физического сигнала.
Выберите угловые ускоряющие параметры, чтобы распознаться. Параметры кодируют угловое ускорение системы координат последователя относительно базовой системы координат, разрешенной в системе координат измерения. Вращение наблюдает правило правой руки: с осью вращения, указывающей из экрана, против часовой стрелки, движение задает положительное вращение, в то время как по часовой стрелке движение задает отрицательное вращение.
Относительные угловые ускорения об этих X, Y, и оси Z базовой системы координат. Выбор Alpha X, Alpha Y и Alpha Z отсоединяет порты bx физического сигнала, by и bz.
Модульный кватернион, который описывает угловое ускорение системы координат последователя относительно базовой системы координат. Выход является четырехэлементным вектором со скаляром (S) и вектор (Vx, Vy, Vz) коэффициенты кватерниона. Вектор обеспечивает коэффициенты в порядке [S Vx Vy Vz]. Выбор Quaternion отсоединяет порт Qdd физического сигнала.
Преобразуйте матрицу, которая описывает угловое ускорение системы координат последователя относительно базовой системы координат. Выход является с девятью элементами, 3×3 матрица. Выбор Transform отсоединяет порт Rdd физического сигнала.
Выберите параметры перевода, чтобы распознаться. Параметры кодируют перевод системы координат последователя относительно базовой системы координат, разрешенной в системе координат измерения.
Возместите вектор от источника базовой системы координат до системы координат последователя вдоль этих X, Y, и оси Z. Выбор X, Y и Z отсоединяет порты x физического сигнала, y и z.
Стандартная координата радиуса найдена в системах цилиндрической координаты. Этот радиус является кратчайшим расстоянием от оси Z базовой системы координат до системы координат последователя. Значение радиуса всегда больше или равно нулю. Выбор Radius отсоединяет порт rad физического сигнала.
Рисунок показывает цилиндрические параметры перевода Z, Radius и Azimuth.
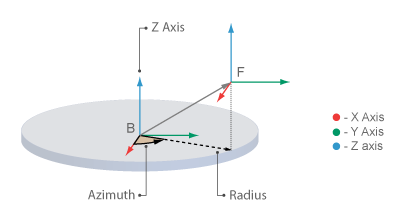
Стандартная координата азимута найдена в цилиндрических и сферических системах координат. Азимут является углом от базовой системы координат +X ось к проекции соединительной основы луча к системам координат последователя на базовую систему координат плоскость XY. Угловое измерение наблюдает правило правой руки. Азимут падает в области значений [-180 °, +180 °]. Если основа и системы координат последователя совпадают друг с другом, азимут не определен. Выбор Azimuth отсоединяет распознающийся порт azm.
Стандартный радиус найден в сферических системах координат. Это - расстояние от источника базовой системы координат до начала координат системы координат последователя. Это расстояние всегда равно или больше, чем нуль. Выбор Distance отсоединяет распознающийся порт dst.
Рисунок показывает сферические параметры перевода Azimuth, Distance и Inclination.
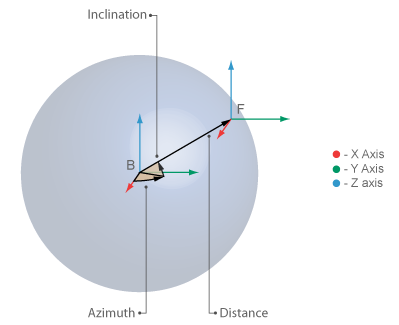
Стандартный наклон найден в сферических системах координат. Наклон является углом соединительной основы луча к системам координат последователя относительно проекции этого луча на базовую систему координат плоскость XY. Угловое измерение наблюдает правило правой руки. Наклон падает в области значений [-90 °, +90 °]. Если основа и системы координат последователя совпадают друг с другом, наклон не определен. Выбор Inclination отсоединяет распознающийся порт inc.
Выберите линейные скоростные параметры, чтобы распознаться. Параметры кодируют линейную скорость системы координат последователя относительно базовой системы координат, разрешенной в системе координат измерения. Дифференцирование параметра перевода происходит в координатах измерения, после того, как тот параметр будет разрешен в выбранной системе координат измерения.
Относительные линейные скорости вдоль этих X, Y, и оси Z. Выбор X, Y и Z отсоединяет порты vx физического сигнала, vy и vz.
Скорость изменения координаты Radius задана под Translation. Выбор Radius отсоединяет порт vrad физического сигнала.
Скорость изменения координаты Azimuth задана под Translation. Выбор Azimuth отсоединяет порт vazm физического сигнала.
Скорость изменения координаты Distance задана под Translation. Выбор Distance отсоединяет порт vdst физического сигнала.
Скорость изменения координаты Inclination задана под Translation. Выбор Inclination отсоединяет порт vinc физического сигнала.
Выберите линейные ускоряющие параметры, чтобы распознаться. Параметры кодируют линейное ускорение системы координат последователя относительно базовой системы координат, разрешенной в системе координат измерения. Дифференцирование параметра перевода происходит в координатах измерения, после того, как тот параметр будет разрешен в выбранной системе координат измерения.
Относительные линейные ускорения вдоль этих X, Y, и оси Z. Выбор X, Y и Z отсоединяет порты ax физического сигнала, ay и az.
Производная второго раза координаты Radius задана под Translation. Выбор Radius отсоединяет порт arad физического сигнала.
Производная второго раза координаты Azimuth задана под Translation. Выбор Azimuth отсоединяет порт aazm физического сигнала.
Производная второго раза координаты Distance задана под Translation. Выбор Distance отсоединяет порт adst физического сигнала.
Производная второго раза координаты Inclination задана под Translation. Выбор Inclination отсоединяет порт ainc физического сигнала.
Блок содержит порты B системы координат и F, представляя базу и последующую систему координат, соответственно.
