Бесщеточный двигатель постоянного тока с тремя обмотками с трапециевидным распределением потока
Simscape / Электрический / Электромеханический / Постоянный магнит

Блок BLDC моделирует постоянный магнит синхронная машина с трехфазным wye - статор раны. Блок имеет четыре опции для определения распределения потока постоянного магнита как функция угла ротора. Две опции допускают простую параметризацию путем принятия совершенного трапецоида для обратной эдс. Для простой параметризации вы задаете или потокосцепление или вызванную ротором обратную эдс. Другие две опции дают более точные результаты с помощью табличных данных, которые вы задаете. Для более точных результатов вы задаете или частную производную потокосцепления или измеренную обратную эдс, постоянную для данной скорости ротора.
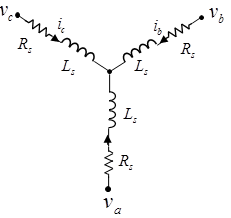
Рисунок показывает эквивалентную электрическую схему для обмоток статора.
Этот рисунок показывает моторную конструкцию с однополюсно-парным на роторе.
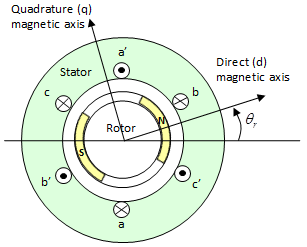
Для соглашения осей в предыдущей фигуре a - выравниваются фаза и потоки постоянного магнита, когда угол ротора θr является нулем. Блок поддерживает второе определение оси ротора. Для второго определения угол ротора является углом между a - фазой магнитная ось и ротором q - ось.
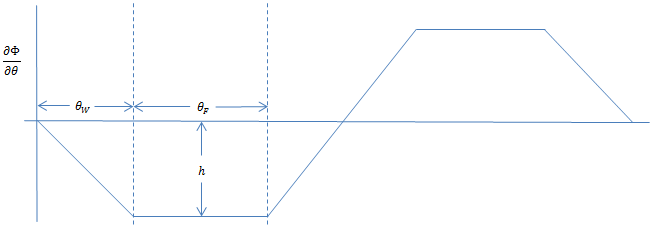
Магнитное поле ротора из-за постоянных магнитов создает трапециевидную скорость изменения потока с углом ротора. Рисунок показывает эту скорость изменения потока.
Обратная эдс является скоростью изменения потока, заданного
где:
Φ является потокосцеплением постоянного магнита.
θ является углом ротора.
ω является скоростью вращательного механического устройства.
Высота h из трапециевидной скорости изменения потока профиль выведен из потока пика постоянного магнита.
Интеграция в области значений 0 к π/2,
где:
Φmax является потокосцеплением постоянного магнита.
h является скоростью изменения высоты профиля потока.
θF является углом ротора, передвигаются, по которому, обратная эдс что поток постоянного магнита вызывает в статоре, является постоянным.
θW является углом ротора, передвигаются, по которым увеличениям обратной эдс или уменьшается линейно, когда ротор перемещается в постоянную скорость.
Реорганизация предыдущего уравнения,
Напряжения через обмотки статора заданы
где:
va, vb и vc являются внешними напряжениями, применился к трем моторным электрическим соединениям.
Rs является эквивалентным сопротивлением каждой обмотки статора.
ia, ib и ic являются токами, текущими в обмотках статора.
и
скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и эти три обмотки способствуют общему потоку, соединяющему каждую обмотку. Общий поток задан
где:
ψa, ψb и ψc являются общими потоками, соединяющими каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba, и т.д. является взаимной индуктивностью обмоток статора.
ψam, ψbm и ψcm являются потоками постоянного магнита, соединяющими обмотки статора.
Индуктивность в обмотках статора является функциями угла ротора, заданного
и
где:
Ls является самоиндукцией статора на фазу — средняя самоиндукция каждой из обмоток статора.
Lm является колебанием индуктивности статора — амплитуда колебания самоиндукции и взаимной индуктивности с изменяющимся углом ротора.
Ms является статором взаимная индуктивность — средняя взаимная индуктивность между обмотками статора.
Поток постоянного магнита, соединяющий каждую обмотку статора, следует за трапециевидным показанным на рисунке профилем. Блок реализует трапециевидный профиль с помощью интерполяционных таблиц, чтобы вычислить значения потока постоянного магнита.
Напряжение определения и уравнения крутящего момента для блока
и
где:
vd, vq и v0 является d - ось, q - ось и напряжения нулевой последовательности.
P является Преобразованием Парка, заданным
N является количеством пар полюса постоянного магнита ротора.
ω является скоростью вращательного механического устройства ротора.
и
частные производные мгновенного потока постоянного магнита, соединяющего каждую обмотку фазы.
id, iq и i0 является d - ось, q - ось и токи нулевой последовательности, заданные
Ld = Ls + Ms + 3/2 Lm. Ld является статором d - индуктивность оси.
Lq = Ls + Ms − 3/2 Lm. Lq является статором q - индуктивность оси.
L0 = Ls – 2Ms. L0 является индуктивностью нулевой последовательности статора.
T является крутящим моментом ротора. Крутящий момент течет из моторного случая (блокируйте физический порт C) к моторному ротору (блокируют физический порт R).
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках (Simscape).
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, пополудни анализ неработающих энергосистем. Хобокен, NJ: нажатие Wiley-IEEE, 1995.

