PMSM
Постоянный магнит синхронный двигатель с синусоидальным распределением потока
Описание
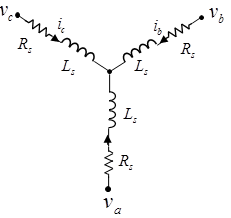
Блок PMSM моделирует постоянный магнит синхронный двигатель с трехфазным wye - статор раны. Рисунок показывает эквивалентную электрическую схему для обмоток статора.
Моторная конструкция
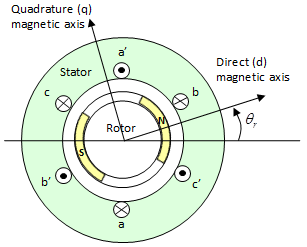
Этот рисунок показывает моторную конструкцию с однополюсно-парным на роторе.
Постоянные магниты генерируют магнитное поле ротора, которое создает синусоидальную скорость изменения потока с углом ротора.
Для соглашения осей в предыдущей фигуре a - выравниваются фаза и потоки постоянного магнита, когда угол механического устройства ротора, θr, является нулем. Блок поддерживает второе определение оси ротора, в котором угол механического устройства ротора задан как угол между a - фазой магнитная ось и ротором q - ось.
Уравнения
Напряжения через обмотки статора заданы:
где:
va, vb и vc являются отдельными напряжениями фазы через обмотки статора.
Rs является эквивалентным сопротивлением каждой обмотки статора.
ia, ib и ic являются токами, текущими в обмотках статора.
и скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и эти три обмотки способствуют общему потоку, соединяющему каждую обмотку. Общий поток задан:
где:
ψa, ψb и ψc являются общими потоками, соединяющими каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba, и так далее, является взаимной индуктивностью обмоток статора.
ψam, ψbm и ψcm являются потоками постоянного магнита, соединяющими обмотки статора.
Индуктивность в обмотках статора является функциями ротора электрический угол, заданный:
и
где:
θr является углом механического устройства ротора.
θe является ротором электрический угол.
Ls является самоиндукцией статора на фазу. Это значение является средней самоиндукцией каждой из обмоток статора.
Lm является колебанием индуктивности статора. Это значение является амплитудой колебания самоиндукции и взаимной индуктивности с изменяющимся углом ротора.
Ms является статором взаимная индуктивность. Это значение является средней взаимной индуктивностью между обмотками статора.
Поток постоянного магнита, соединяющий извилистый a, является максимумом когда θe = 0 ° и нуль когда θe = 90 °. Поэтому соединенный моторный поток задан:
где ψm является потокосцеплением постоянного магнита.
Упрощенные электрические уравнения
Применение преобразования Парка с блоком, электрические уравнения производят выражение для крутящего момента, который независим от угла ротора.
Преобразование парка задано:
где θe является электрическим углом, заданным как Nθr. N является количеством пар полюса.
Используя преобразование Парка на статоре извилистые напряжения и токи преобразовывают их к системе координат dq0, которая независима от угла ротора:
и
Применение преобразования Парка к первым двум электрическим уравнениям производит следующие уравнения, которые задают поведение блока:
и
где:
Ld = Ls + Ms + 3/2 Lm. Ld является статором d - индуктивность оси.
Lq = Ls + Ms − 3/2 Lm. Lq является статором q - индуктивность оси.
L0 = Ls – 2Ms. L0 является индуктивностью нулевой последовательности статора.
ω является скоростью вращательного механического устройства ротора.
N является количеством пар полюса постоянного магнита ротора.
T является крутящим моментом ротора. Крутящий момент течет из моторного случая (блокируйте физический порт C) к моторному ротору (блокируют физический порт R).
Использование блока PMSM исходная, неортогональная реализация Парка преобразовывает. При попытке применить альтернативную реализацию, вы получаете различные результаты для dq0 напряжения и токов.
Альтернативная параметризация потокосцепления
Можно параметризовать двигатель с помощью обратной эдс или закрутить константы, которые чаще всего даются на моторных таблицах данных при помощи опции Permanent magnet flux linkage.
Постоянная обратная эдс задана как пиковое напряжение, вызванное постоянным магнитом в каждой из фаз на модульную скорость вращения. Это связано с пиковым потокосцеплением постоянного магнита:
Из этого определения, из этого следует, что обратной эдс eph для одной фазы дают:
Постоянный крутящий момент задан как пиковый крутящий момент, вызванный каждой из фаз на текущий модуль. Это численно идентично в значении обратной эдс, постоянной, когда оба выражаются в единицах СИ:
Когда Ld =Lq, и когда токи во всех трех фазах сбалансированы, из этого следует, что объединенным крутящим моментом T дают:
где Ipk является максимальным током в любой из этих трех обмоток.
Фактор 3/2 следует из этого являющегося установившейся суммой крутящих моментов от всех фаз. Поэтому крутящий момент постоянный kt мог также быть задан как:
где T является измеренным общим крутящим моментом при тестировании со сбалансированным трехфазным током с пиковым линейным напряжением Ipk. Запись в терминах линейного напряжения RMS:
Порты
Сохранение
развернуть все
~ — Трехфазный порт
электрический
n — Нейтральная фаза
электрический
Электрический порт сохранения сопоставлен с нейтральной фазой.
R — Моторный ротор
механическое устройство
Порт сохранения вращательного механического устройства сопоставлен с моторным ротором.
C — Моторный случай
механическое устройство
Порт сохранения вращательного механического устройства сопоставлен с моторным случаем.
Параметры
развернуть все
Основной
Winding type — Настройка обмоток
Wye-wound (значение по умолчанию) | Delta-wound
Выберите настройку для обмоток:
Wye-wound — Обмотками является wye - рана.
Delta-wound — Обмотки являются раной дельты. a - фаза соединяется между портами a и b, b - фазой между портами b и c и c - фаза между портами c и a.
Number of pole pairs — Количество пар полюса
6
Количество постоянного магнита подпирает пары шестами на роторе.
Permanent magnet flux linkage parameterization — Параметризация потокосцепления постоянного магнита
Specify flux linkage (значение по умолчанию) | Specify torque constant | Specify back EMF constant
Выберите Specify flux linkage, Specify torque constant, или Specify back EMF constant.
Permanent magnet flux linkage — Потокосцепление постоянного магнита
0.03 Wb (значение по умолчанию)
Пиковое потокосцепление постоянного магнита с любой из обмоток статора.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Permanent magnet flux linkage на Specify flux linkage.
Torque constant — Постоянный крутящий момент
0.18 N*m/A (значение по умолчанию)
Крутящий момент, постоянный с любой из обмоток статора.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Permanent magnet flux linkage на Specify torque constant.
Back EMF constant — Постоянная Обратная эдс
0.18 V*s/rad (значение по умолчанию)
Обратная эдс, постоянная с любой из обмоток статора.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Permanent magnet flux linkage на Specify back EMF constant.
Stator parameterization — Параметризация статора
Specify Ld, Lq, and L0 (значение по умолчанию) | Specify Ls, Lm, and Ms
Выберите Specify Ld, Lq, and L0 или Specify Ls, Lm, and Ms.
Stator d-axis inductance, Ld — Индуктивность d-оси статора
0.00022 H (значение по умолчанию)
Индуктивность D-оси.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Stator parameterization на Specify Ld, Lq, and L0.
Stator q-axis inductance, Lq — Индуктивность q-оси статора
0.00022 H (значение по умолчанию)
Индуктивность Q-оси.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Stator parameterization на Specify Ld, Lq, and L0.
Stator zero-sequence inductance, L0 — Индуктивность нулевой последовательности статора
0.00016 H (значение по умолчанию)
Индуктивность нулевой последовательности.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Stator parameterization на Specify Ld, Lq, and L0.
Stator self-inductance per phase, Ls — Самоиндукция статора на фазу
0.0002 H (значение по умолчанию)
Средняя самоиндукция каждой из трех обмоток статора.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Stator parameterization на Specify Ls, Lm, and Ms.
Stator inductance fluctuation, Lm — Колебание индуктивности статора
0 H (значение по умолчанию)
Амплитуда колебания самоиндукции и взаимной индуктивности обмоток статора с углом ротора.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Stator parameterization на Specify Ls, Lm, and Ms.
Stator mutual inductance, Ms — Статор взаимная индуктивность
0.00002 H (значение по умолчанию)
Средняя взаимная индуктивность между обмотками статора.
Зависимости
Этот параметр отображается только, когда вы устанавливаете параметр Stator parameterization на Specify Ls, Lm, and Ms.
Stator resistance per phase, Rs — Сопротивление статора на фазу
0.013 Ohm (значение по умолчанию)
Сопротивление каждой из обмоток статора.
Zero sequence — Нулевая опция последовательности
Include (значение по умолчанию) | Exclude
Опция, чтобы включать или исключить условия нулевой последовательности.
Include — Включайте условия нулевой последовательности. Чтобы приоритизировать точность модели, используйте эту настройку по умолчанию. Используя эту опцию:
Exclude — Исключите условия нулевой последовательности. Чтобы приоритизировать скорость симуляции для настольной симуляции или развертывания приложений, выберите эту опцию.
Rotor angle definition — Контрольная точка для углового измерения ротора
Angle between the a-phase magnetic axis and the d-axis (значение по умолчанию) | Angle between the a-phase magnetic axis and the q-axis
Контрольная точка для углового измерения ротора. Значением по умолчанию является Angle between the a-phase magnetic axis and the d-axis. Это определение показывают в Моторной фигуре Конструкции. Когда вы выбираете это значение, ротор и a - потоки фазы выравниваются, когда угол ротора является нулем.
Другим значением, которое можно выбрать для этого параметра, является Angle between the a-phase magnetic axis and the q-axis. Когда вы выбираете это значение, a - текущая фаза генерирует максимальный крутящий момент, когда угол ротора является нулем.
Механическое устройство
Rotor inertia — Инерция ротора
0.01
kg*m^2 (значение по умолчанию)
Инерция ротора присоединяется к механическому поступательному порту R. Значение может быть нулем.
Rotor damping — Затухание ротора
0 N*m/(rad/s) (значение по умолчанию)
Ссылки
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, пополудни анализ неработающих энергосистем. Хобокен, NJ: нажатие Wiley-IEEE, 1995.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Смотрите также
Блоки Simscape
Блоки
Введенный в R2013b