Resolver
Ротационный преобразователь, который измеряет угол вращения
Описание
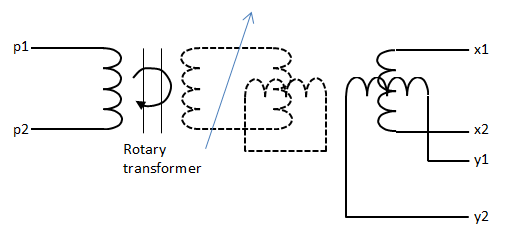
Блок Resolver моделирует типовой преобразователь, который измеряет электрический угол фазы сигнала посредством электромагнитной связи. Преобразователь состоит из ротационного преобразователя, который связывается, напряжение переменного тока применилось к первичной обмотке двум вторичным обмоткам. Эти вторичные обмотки физически ориентированы в 90 градусах друг на друга. Когда угол ротора изменяется, относительная связь между основным устройством и этими двумя вторичными обмотками варьируется. В модели блока Resolver первая вторичная обмотка ориентирована таким образом, что пиковая связь происходит, когда ротор в нулевых степенях, и поэтому вторая вторичная обмотка имеет связь минимума, когда ротор в нулевых степенях.
Без потери общности это принято, что преобразователь между первичным и схемой ротора идеален с отношением 1:1. Это приводит к текущему ротору и напряжение, являющееся эквивалентным первичному току и напряжению.
У вас есть две опции для того, чтобы определить уравнения блока:
Не используйте динамику путем пренебрежения преобразователя индуктивные условия. Эта модель только допустима, если датчик управляется синусоидой, потому что любой компонент DC на первичной стороне передаст выходной стороне.
Включайте индуктивные условия, таким образом, получая амплитудную потерю напряжения и разность фаз. Эта модель допустима для любой входной формы волны. В рамках этой опции можно или задать индуктивность и пиковый коэффициент связи непосредственно, или задать коэффициент трансформации и измеренные импедансы, в этом случае блок использует эти значения, чтобы определить индуктивные условия.
Уравнения при Исключении Динамики
Уравнения основаны на суперпозиции двух идеальных преобразователей, обоих с коэффициентами связи, которые зависят от угла ротора. Два идеальных преобразователя имеют общую первичную обмотку. Смотрите страницу с описанием блока Simscape™ Ideal Transformer для получения дополнительной информации о моделировании идеальных преобразователей. Уравнения:
где:
vp и ip являются ротором (или эквивалентно первичный) напряжение и текущий, соответственно.
vx и ix являются первым вторичным напряжением и текущий, соответственно.
vy и iy являются вторым вторичным напряжением и текущий, соответственно.
Kx является коэффициентом связи для первой вторичной обмотки.
Ky является коэффициентом связи для второй вторичной обмотки.
R является коэффициентом трансформации.
N является количеством пар полюса.
Θ является углом ротора.
Уравнения, когда Включая Динамику
Уравнения основаны на суперпозиции двух взаимных индукторов, обоих с коэффициентами связи, которые зависят от угла ротора. Два взаимных индуктора имеют общую первичную обмотку. Смотрите страницу с описанием блока Simscape Mutual Inductor для получения дополнительной информации о моделировании взаимных индукторов. Уравнения:
где:
vp и ip являются ротором (или эквивалентно первичный) напряжение и текущий, соответственно.
vx и ix являются первым вторичным напряжением и текущий, соответственно.
vy и iy являются вторым вторичным напряжением и текущий, соответственно.
Rp является ротором (или первичный) сопротивление.
Lp является ротором (или первичный) индуктивность.
Rs является статором (или вторичный) сопротивление.
Ls является статором (или вторичный) индуктивность.
N является количеством пар полюса.
k является коэффициентом связи.
Θ является углом ротора.
Это принято, что связь между этими двумя вторичными обмотками является нулем.
Таблицы данных обычно не заключают коэффициент в кавычки связи и параметров индуктивности, но вместо этого дают коэффициент трансформации R и измеренные импедансы. Если вы выбираете Specify transformation ratio and measured impedances для параметра Parameterization затем значения, которые вы вводите, используются, чтобы определить значения для коэффициентов уравнения, как задано выше.
Предположения и ограничения
Преобразователь не чертит крутящего момента между портами R и C вращательного механического устройства.
Преобразователь между первичным и схемой ротора идеален с отношением 1:1.
Связь между этими двумя вторичными обмотками является нулем.
Порты
Сохранение
развернуть все
p1 — Первичная обмотка положительный терминал
электрический
Электрический порт сохранения сопоставлен с положительным терминалом первичной обмотки.
p2 — Первичная обмотка отрицательный терминал
электрический
Электрический порт сохранения сопоставлен с отрицательным терминалом первичной обмотки.
R — Ротор преобразователя
вращательное механическое устройство
Порт сохранения вращательного механического устройства соединяется с ротором.
C — Случай преобразователя
вращательное механическое устройство
Порт сохранения вращательного механического устройства соединяется со случаем преобразователя.
x1 — Вторичная обмотка x положительный терминал
электрический
Электрический порт сохранения сопоставлен с положительным терминалом вторичной обмотки x.
x2 — Вторичная обмотка x отрицательный терминал
электрический
Электрический порт сохранения сопоставлен с отрицательным терминалом вторичной обмотки x.
y1 — Вторичная обмотка y положительный терминал
электрический
Электрический порт сохранения сопоставлен с положительным терминалом вторичной обмотки y.
y2 — Вторичная обмотка y отрицательный терминал
электрический
Электрический порт сохранения сопоставлен с отрицательным терминалом вторичной обмотки y.
Параметры
развернуть все
Parameterization — Параметризация преобразователя
Specify transformation ratio and omit dynamics (значение по умолчанию) | Specify transformation ratio and measured impedances | Specify equation parameters directly
Выберите один из следующих методов для параметризации блока:
Specify transformation ratio and omit dynamics — Введите значения для коэффициента трансформации, количества пар полюса и начального угла ротора только. Эта модель пропускает преобразователь индуктивные условия и только допустима, если датчик управляется синусоидой. Уравнения основаны на суперпозиции двух идеальных преобразователей, обоих с коэффициентами связи, которые зависят от угла ротора. Для получения дополнительной информации смотрите уравнения при Исключении Динамики.
Specify transformation ratio and measured impedances — Введите дополнительные значения, чтобы определить преобразователь индуктивные условия, смоделировать амплитудную потерю напряжения и разность фаз. Эта модель допустима для любой входной формы волны. Уравнения основаны на суперпозиции двух взаимных индукторов, обоих с коэффициентами связи, которые зависят от угла ротора. Для получения дополнительной информации смотрите уравнения когда Включая Динамику.
Specify equation parameters directly — Смоделируйте динамику, но введите значения для ротора и индуктивности статора и пикового коэффициента связи вместо коэффициента трансформации и измеренных импедансов. Для получения дополнительной информации смотрите уравнения когда Включая Динамику. Эта модель допустима для любой входной формы волны.
Transformation ratio — Пиковый выход к отношению входного напряжения
0.5
Отношение между пиковым выходным напряжением и пиковым входным напряжением, принимающим незначительное вторичное падение напряжения из-за сопротивления и индуктивности.
Зависимости
Чтобы включить этот параметр, установите параметр Parameterization на Specify transformation ratio and omit dynamics или Specify transformation ratio and measured impedances. Если вы выбираете Specify transformation ratio and measured impedances для параметра Parameterization затем коэффициент трансформации берет падение напряжения из-за сопротивления первичной обмотки во внимание.
Rotor resistance — Первичное сопротивление
70 Ohm (значение по умолчанию) | положительное число
Ротор омическое сопротивление. Это сопротивление также упоминается как первичное сопротивление.
Зависимости
Чтобы включить этот параметр, установите параметр Parameterization на Specify transformation ratio and measured impedances или Specify equation parameters directly.
Stator resistance — Вторичное сопротивление
180 Ohm (значение по умолчанию) | положительное число
Статор омическое сопротивление. Это сопротивление также упоминается как вторичное сопротивление. Это принято, что оба вторичных устройства имеют то же сопротивление.
Зависимости
Чтобы включить этот параметр, установите параметр Parameterization на Specify transformation ratio and measured impedances или Specify equation parameters directly.
Rotor reactance — Первичное реактивное сопротивление
100 Ohm (значение по умолчанию) | положительное число
Реактивное сопротивление ротора, когда вторичные обмотки являются разомкнутой цепью. Это реактивное сопротивление также упоминается как первичное реактивное сопротивление.
Зависимости
Чтобы включить этот параметр, установите параметр Parameterization на Specify transformation ratio and measured impedances.
Stator reactance — Вторичное реактивное сопротивление
300 Ohm (значение по умолчанию) | положительное число
Реактивное сопротивление статора, когда первичная обмотка является разомкнутой цепью. Это реактивное сопротивление также упоминается как вторичное реактивное сопротивление.
Зависимости
Чтобы включить этот параметр, установите параметр Parameterization на Specify transformation ratio and measured impedances.
Frequency at which reactances and transformation ratio are specified — Синусоидальная исходная частота
10 kHz (значение по умолчанию) | положительное число
Частота синусоидального источника, используемого при измерении реактивных сопротивлений.
Зависимости
Чтобы включить этот параметр, установите параметр Parameterization на Specify transformation ratio and measured impedances.
Rotor inductance — Первичное реактивное сопротивление
0.0016 H (значение по умолчанию) | положительное число
Ротор или первичная индуктивность, L p.
Зависимости
Чтобы включить этот параметр, установите параметр Parameterization на Specify equation parameters directly.
Stator inductance — Вторичное реактивное сопротивление
0.0048 H (значение по умолчанию) | положительное число
Статор или вторичная индуктивность, L s.
Зависимости
Чтобы включить этот параметр, установите параметр Parameterization на Specify equation parameters directly.
Peak coefficient of coupling — Максимальный коэффициент связи
0.35
Пиковый коэффициент связи между первичными и вторичными обмотками.
Зависимости
Чтобы включить этот параметр, установите параметр Parameterization на Specify equation parameters directly.
Number of pole pairs — Пары полюса ротора
1
Количество пар полюса на роторе.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью MATLAB® Coder™.
Введенный в R2017b