Создание обучающих данных для детектора объектов
[ создает datastore изображений и datastore метки поля обучающие данные от заданной основной истины.imds,blds] = objectDetectorTrainingData(gTruth)
Можно объединить изображение и хранилища данных метки поля с помощью combineimds , blds) создать datastore, необходимый для обучения. Используйте объединенный datastore с учебными функциями, такими как trainACFObjectDetector, trainYOLOv2ObjectDetector, trainFastRCNNObjectDetector, trainFasterRCNNObjectDetector, и trainRCNNObjectDetector.
Эта функция поддерживает параллельные вычисления с помощью нескольких рабочих MATLAB®. Включите параллельные вычисления с помощью диалогового окна Настроек Computer Vision Toolbox.
trainingDataTable = objectDetectorTrainingData(gTruth)
___ = objectDetectorTrainingData( возвращает таблицу обучающих данных с дополнительными опциями, заданными одним или несколькими аргументами пары "имя-значение". Если вы создаете gTruth,Name,Value)groundTruth объекты в gTruth с помощью видеофайла или пользовательского источника данных, затем можно задать любую комбинацию аргументов пары "имя-значение". Если вы создаете groundTruth объекты от коллекции изображений или источника данных последовательности изображений, затем можно задать только 'SamplingFactor'аргумент пары "имя-значение".
Обучите детектор транспортного средства на основе сети YOLO v2.
Добавьте папку, содержащую изображения к рабочей области.
imageDir = fullfile(matlabroot,'toolbox','vision','visiondata','vehicles'); addpath(imageDir);
Загрузите достоверные данные транспортного средства.
data = load('vehicleTrainingGroundTruth.mat');
gTruth = data.vehicleTrainingGroundTruth;Загрузите детектор, содержащий объект layerGraph для обучения.
vehicleDetector = load('yolov2VehicleDetector.mat');
lgraph = vehicleDetector.lgraphlgraph =
LayerGraph with properties:
Layers: [25×1 nnet.cnn.layer.Layer]
Connections: [24×2 table]
Создайте datastore изображений и datastore метки поля с помощью объекта основной истины.
[imds,bxds] = objectDetectorTrainingData(gTruth);
Объедините хранилища данных.
cds = combine(imds,bxds);
Сконфигурируйте опции обучения.
options = trainingOptions('sgdm', ... 'InitialLearnRate', 0.001, ... 'Verbose',true, ... 'MiniBatchSize',16, ... 'MaxEpochs',30, ... 'Shuffle','every-epoch', ... 'VerboseFrequency',10);
Обучите детектор.
[detector,info] = trainYOLOv2ObjectDetector(cds,lgraph,options);
Training on single CPU. |========================================================================================| | Epoch | Iteration | Time Elapsed | Mini-batch | Mini-batch | Base Learning | | | | (hh:mm:ss) | RMSE | Loss | Rate | |========================================================================================| | 1 | 1 | 00:00:00 | 7.83 | 61.4 | 0.0010 | | 1 | 10 | 00:00:05 | 2.12 | 4.5 | 0.0010 | | 2 | 20 | 00:00:11 | 1.39 | 1.9 | 0.0010 | | 2 | 30 | 00:00:16 | 1.83 | 3.3 | 0.0010 | | 3 | 40 | 00:00:22 | 1.56 | 2.4 | 0.0010 | | 3 | 50 | 00:00:27 | 1.60 | 2.5 | 0.0010 | | 4 | 60 | 00:00:32 | 1.52 | 2.3 | 0.0010 | | 4 | 70 | 00:00:37 | 1.58 | 2.5 | 0.0010 | | 5 | 80 | 00:00:43 | 1.54 | 2.4 | 0.0010 | | 5 | 90 | 00:00:48 | 1.20 | 1.5 | 0.0010 | | 6 | 100 | 00:00:53 | 1.16 | 1.3 | 0.0010 | | 7 | 110 | 00:00:58 | 1.02 | 1.0 | 0.0010 | | 7 | 120 | 00:01:03 | 1.05 | 1.1 | 0.0010 | | 8 | 130 | 00:01:09 | 1.13 | 1.3 | 0.0010 | | 8 | 140 | 00:01:14 | 1.06 | 1.1 | 0.0010 | | 9 | 150 | 00:01:19 | 1.15 | 1.3 | 0.0010 | | 9 | 160 | 00:01:24 | 1.03 | 1.1 | 0.0010 | | 10 | 170 | 00:01:30 | 1.10 | 1.2 | 0.0010 | | 10 | 180 | 00:01:35 | 0.90 | 0.8 | 0.0010 | | 11 | 190 | 00:01:40 | 0.67 | 0.4 | 0.0010 | | 12 | 200 | 00:01:45 | 0.87 | 0.8 | 0.0010 | | 12 | 210 | 00:01:50 | 0.73 | 0.5 | 0.0010 | | 13 | 220 | 00:01:56 | 1.00 | 1.0 | 0.0010 | | 13 | 230 | 00:02:01 | 0.73 | 0.5 | 0.0010 | | 14 | 240 | 00:02:06 | 0.97 | 0.9 | 0.0010 | | 14 | 250 | 00:02:11 | 0.76 | 0.6 | 0.0010 | | 15 | 260 | 00:02:17 | 0.99 | 1.0 | 0.0010 | | 15 | 270 | 00:02:22 | 0.76 | 0.6 | 0.0010 | | 16 | 280 | 00:02:27 | 0.71 | 0.5 | 0.0010 | | 17 | 290 | 00:02:32 | 0.79 | 0.6 | 0.0010 | | 17 | 300 | 00:02:38 | 0.77 | 0.6 | 0.0010 | | 18 | 310 | 00:02:43 | 0.80 | 0.6 | 0.0010 | | 18 | 320 | 00:02:48 | 0.74 | 0.5 | 0.0010 | | 19 | 330 | 00:02:53 | 0.90 | 0.8 | 0.0010 | | 19 | 340 | 00:02:59 | 0.79 | 0.6 | 0.0010 | | 20 | 350 | 00:03:04 | 1.01 | 1.0 | 0.0010 | | 20 | 360 | 00:03:09 | 0.70 | 0.5 | 0.0010 | | 21 | 370 | 00:03:14 | 0.63 | 0.4 | 0.0010 | | 22 | 380 | 00:03:20 | 0.77 | 0.6 | 0.0010 | | 22 | 390 | 00:03:25 | 0.61 | 0.4 | 0.0010 | | 23 | 400 | 00:03:30 | 0.63 | 0.4 | 0.0010 | | 23 | 410 | 00:03:35 | 0.56 | 0.3 | 0.0010 | | 24 | 420 | 00:03:41 | 0.84 | 0.7 | 0.0010 | | 24 | 430 | 00:03:46 | 0.63 | 0.4 | 0.0010 | | 25 | 440 | 00:03:51 | 0.77 | 0.6 | 0.0010 | | 25 | 450 | 00:03:56 | 0.62 | 0.4 | 0.0010 | | 26 | 460 | 00:04:01 | 0.60 | 0.4 | 0.0010 | | 27 | 470 | 00:04:07 | 0.66 | 0.4 | 0.0010 | | 27 | 480 | 00:04:12 | 0.55 | 0.3 | 0.0010 | | 28 | 490 | 00:04:17 | 0.57 | 0.3 | 0.0010 | | 28 | 500 | 00:04:23 | 0.51 | 0.3 | 0.0010 | | 29 | 510 | 00:04:28 | 0.72 | 0.5 | 0.0010 | | 29 | 520 | 00:04:33 | 0.60 | 0.4 | 0.0010 | | 30 | 530 | 00:04:38 | 0.65 | 0.4 | 0.0010 | | 30 | 540 | 00:04:43 | 0.62 | 0.4 | 0.0010 | |========================================================================================|
Считайте тестовое изображение.
I = imread('highway.png');Запустите детектор.
[bboxes,scores] = detect(detector,I);
Отобразите результаты.
if(~isempty(bboxes)) I = insertObjectAnnotation(I,'rectangle',bboxes,scores); end figure imshow(I)

Используйте обучающие данные, чтобы обучить основанный на ACF детектор объектов знакам Стоп
Добавьте папку, содержащую изображения к пути MATLAB.
imageDir = fullfile(matlabroot, 'toolbox', 'vision', 'visiondata', 'stopSignImages'); addpath(imageDir);
Загрузите достоверные данные, который содержит данные для знаков остановок и автомобилей.
load('stopSignsAndCarsGroundTruth.mat','stopSignsAndCarsGroundTruth')
Просмотрите определения метки, чтобы видеть типы метки в основной истине.
stopSignsAndCarsGroundTruth.LabelDefinitions
Выберите данные о знаке Стоп для обучения.
stopSignGroundTruth = selectLabels(stopSignsAndCarsGroundTruth,'stopSign');Создайте обучающие данные для детектора объектов знака Стоп.
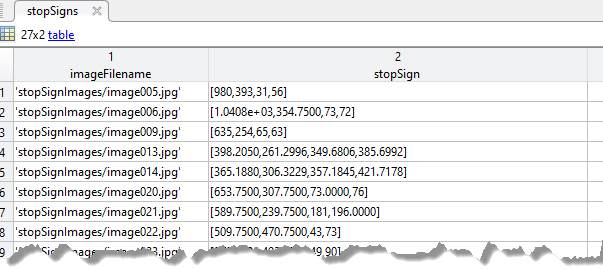
trainingData = objectDetectorTrainingData(stopSignGroundTruth); summary(trainingData)
Variables:
imageFilename: 41×1 cell array of character vectors
stopSign: 41×1 cell
Обучите основанный на ACF детектор объектов.
acfDetector = trainACFObjectDetector(trainingData,'NegativeSamplesFactor',2);ACF Object Detector Training The training will take 4 stages. The model size is 34x31. Sample positive examples(~100% Completed) Compute approximation coefficients...Completed. Compute aggregated channel features...Completed. -------------------------------------------- Stage 1: Sample negative examples(~100% Completed) Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 19 weak learners. -------------------------------------------- Stage 2: Sample negative examples(~100% Completed) Found 84 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 20 weak learners. -------------------------------------------- Stage 3: Sample negative examples(~100% Completed) Found 84 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 54 weak learners. -------------------------------------------- Stage 4: Sample negative examples(~100% Completed) Found 84 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 61 weak learners. -------------------------------------------- ACF object detector training is completed. Elapsed time is 30.3579 seconds.
Протестируйте основанный на ACF детектор на демонстрационном изображении.
I = imread('stopSignTest.jpg');
bboxes = detect(acfDetector,I);
Отобразите обнаруженный объект.
annotation = acfDetector.ModelName;
I = insertObjectAnnotation(I,'rectangle',bboxes,annotation);
figure
imshow(I)
Удалите папку изображений из пути.
rmpath(imageDir);
Используйте обучающие данные, чтобы обучить основанный на ACF детектор объектов транспортным средствам.
imageDir = fullfile(matlabroot,'toolbox','driving','drivingdata','vehiclesSequence'); addpath(imageDir);
Загрузите достоверные данные.
load vehicleGroundTruth.matСоздайте обучающие данные для детектора объектов для транспортных средств
trainingData = objectDetectorTrainingData(gTruth,'SamplingFactor',2);Обучите основанный на ACF детектор объектов.
acfDetector = trainACFObjectDetector(trainingData,'ObjectTrainingSize',[20 20]);ACF Object Detector Training The training will take 4 stages. The model size is 20x20. Sample positive examples(~100% Completed) Compute approximation coefficients...Completed. Compute aggregated channel features...Completed. -------------------------------------------- Stage 1: Sample negative examples(~100% Completed) Compute aggregated channel features...Completed. Train classifier with 71 positive examples and 355 negative examples...Completed. The trained classifier has 68 weak learners. -------------------------------------------- Stage 2: Sample negative examples(~100% Completed) Found 76 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 71 positive examples and 355 negative examples...Completed. The trained classifier has 120 weak learners. -------------------------------------------- Stage 3: Sample negative examples(~100% Completed) Found 54 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 71 positive examples and 355 negative examples...Completed. The trained classifier has 170 weak learners. -------------------------------------------- Stage 4: Sample negative examples(~100% Completed) Found 63 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 71 positive examples and 355 negative examples...Completed. The trained classifier has 215 weak learners. -------------------------------------------- ACF object detector training is completed. Elapsed time is 28.4547 seconds.
Протестируйте детектор ACF на тестовом изображении.
I = imread('highway.png'); [bboxes, scores] = detect(acfDetector,I,'Threshold',1);
Выберите обнаружение с самым высоким счетом классификации.
[~,idx] = max(scores);
Отобразите обнаруженный объект.
annotation = acfDetector.ModelName;
I = insertObjectAnnotation(I,'rectangle',bboxes(idx,:),annotation);
figure
imshow(I)
Удалите папку изображений из пути.
rmpath(imageDir);
imds ImageDatastoreimageDatastore объектОтобразите datastore, возвращенный как imageDatastore объект, содержащий изображения, извлечен из gTruth объекты. Изображения в imds содержите по крайней мере один класс аннотируемых меток. Функция игнорирует изображения, которые не аннотируются.
blds — Datastore метки поляboxLabelDatastore объектDatastore метки поля, возвращенный как boxLabelDatastore объект. Datastore содержит категориальные векторы для имен метки ROI и M-by-4 матрицы ограничительных рамок M. Местоположения и размеры ограничительных рамок представлены как двойной M-by-4 векторы элемента в формате [x, y, width, height].
trainingDataTable — Таблица обучающих данныхТаблица обучающих данных, возвращенная как таблица с двумя или больше столбцами. Первый столбец таблицы содержит имена файла образа с путями. Изображения могут быть полутоновым или истинным цветом (RGB) и в любом формате, поддержанном imread. Каждый из остальных столбцов содержит M-by-4 матрицы, которые представляют класс отдельного объекта, такой как транспортное средство, цветок или биологический тип ячейки. Столбцы содержат ограничительные рамки M в формате [x, y, width, height]. Формат задает местоположение верхнего левого угла и размер ограничительной рамки в соответствующем изображении. Чтобы составить таблицу основной истины, можно использовать приложение Image Labeler или приложение Video Labeler.
Выходная таблица игнорирует любую подметку или данные об атрибуте, существующие во входе gTruth объект.
estimateAnchorBoxes | trainACFObjectDetector | trainFastRCNNObjectDetector | trainFasterRCNNObjectDetector | trainRCNNObjectDetector | trainYOLOv2ObjectDetector