Компенсируйте модулируемые сигналы с помощью линейной фильтрации
Communications Toolbox / Эквалайзеры
Блок Linear Equalizer использует коснувшийся сетевой фильтр задержки, чтобы компенсировать линейно модулируемый сигнал через дисперсионный канал. Используя оценку канала, смоделированного как фильтр конечного входного ответа (FIR), входные кадры процессов блока и выходные параметры предполагаемый сигнал.
Этот значок показывает блок со всеми портами, включенными для настроек, которые используют LMS или адаптивный алгоритм RLS.
![]()
Этот значок показывает блок со всеми портами, включенными для настроек, которые используют CMA адаптивный алгоритм.
![]()
Типы данных |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
Линейные эквалайзеры могут удалить интерференцию межсимвола (ISI), когда частотная характеристика канала не имеет никакого пустого указателя. Если пустой указатель существует в частотной характеристике канала, линейные эквалайзеры имеют тенденцию улучшать шум. В этом случае используйте эквалайзеры обратной связи решения, чтобы не улучшать шум.
Линейный эквалайзер состоит из коснувшейся линии задержки, которая хранит выборки от входного сигнала. Однажды на период символа, эквалайзер выводит взвешенную сумму значений в линии задержки и обновляет веса, чтобы подготовиться к следующему периоду символа.
Линейные эквалайзеры могут быть расположены с интервалами символом или дробные расположенный с интервалами символом.
Для расположенного с интервалами символом эквалайзера количество выборок на символ, K, равняется 1. Выходная частота дискретизации равняется входной частоте дискретизации.
Для дробного расположенного с интервалами символом эквалайзера количество выборок на символ, K, является целым числом, больше, чем 1. Как правило, K 4 для незначительно расположенных с интервалами эквалайзеров. Выходная частота дискретизации является 1/T, и входной частотой дискретизации является K/T, где T является периодом символа. Обновление веса касания происходит при норме выработки.
Это схематические показы линейный эквалайзер с весами L, периодом символа T и выборками K на символ. Если K равняется 1, результатом является расположенный с интервалами символом линейный эквалайзер вместо дробного расположенного с интервалами символом линейного эквалайзера.
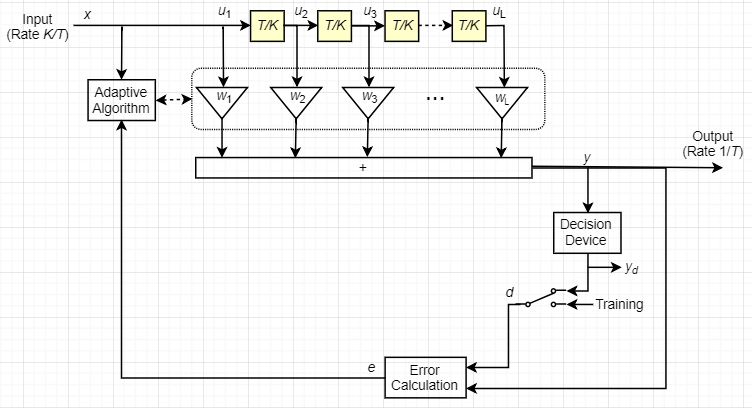
В каждый период символа эквалайзер получает выборки входа K в коснувшейся линии задержки. Эквалайзер затем выводит взвешенную сумму значений в коснувшейся линии задержки и обновляет веса, чтобы подготовиться к следующему периоду символа.
Для получения дополнительной информации смотрите Эквализацию.


