Откройте PID Tuner для настройки ПИДа
pidTuner(sys,type)
pidTuner(sys,Cbase)
pidTuner(sys)
pidTuner
pidTuner( запускает приложение PID Tuner и проектирует контроллер типа sys,type)type для объекта sys.
pidTuner( запуски PID Tuner с базовым контроллером sys,Cbase)Cbase так, чтобы можно было сравнить производительность между спроектированным контроллером и базовым контроллером. Если Cbase pid, pidstd, pid2 или pidstd2 объект контроллера, PID Tuner проектирует контроллер той же формы, введите, и дискретные формулы интегратора как Cbase.
pidTuner( проектирует ПИ-контроллер параллельной формы.sys)
pidTuner запуски PID Tuner с объектом по умолчанию 1 и пропорциональным (P) контроллером 1 года.
|
Модель объекта управления для проектирования контроллера.
Если объект имеет нестабильные полюса и
затем необходимо задать количество нестабильных полюсов на объекте. Для этого, после вводного PID Tuner, в меню Plant, выбирают |
|
Тип контроллера контроллера, чтобы спроектировать в виде вектора символов. Термин controller type относится, к которому условия присутствуют в действии контроллера. Например, ПИ-контроллер имеет только пропорциональное и интегральный термин, в то время как контроллер PIDF содержит пропорциональный, интегратор, и отфильтровал производные условия. Контроллеры 1-DOF
Контроллеры 2-DOF
Для получения дополнительной информации о ПИД-регуляторах 2-DOF обычно, смотрите ПИД-регуляторы с двумя степенями свободы. Контроллеры 2-DOF с фиксированными весами заданного значения
Для более подробной информации о фиксированном весе заданного значения ПИД-регуляторы 2-DOF смотрите Типы ПИД-регулятора для Настройки. Форма контроллераКогда вы используете Если
Для получения дополнительной информации о дискретных формулах интегратора, смотрите |
|
Динамическая система, представляющая базовый контроллер, разрешая сравнение производительности спроектированного контроллера к производительности Если
Если |
Интерактивная настройка ПИДа контроллера Параллельной Формы
Запустите PID Tuner, чтобы спроектировать параллельную форму контроллер PIDF для объекта дискретного времени:
Gc = zpk([],[-1 -1 -1],1); Gd = c2d(Gc,0.1); % Create discrete-time plant pidTuner(Gd,'pidf') % Launch PID Tuner
Интерактивная настройка ПИДа контроллера Стандартной Формы Используя метод дискретизации интегратора
Спроектируйте стандартную форму контроллер PIDF, использующий BackwardEuler дискретная формула интегратора:
Gc = zpk([],[-1 -1 -1],1);
Gd = c2d(Gc,0.1); % Create discrete-time plant
% Create baseline controller.
Cbase = pidstd(1,2,3,4,'Ts',0.1,...
'IFormula','BackwardEuler','DFormula','BackwardEuler')
pidTuner(Gd,Cbase) % Launch PID TunerPID Tuner проектирует контроллер для Gd при наличии той же формы введите, и дискретные формулы интегратора как Cbase. Для сравнения можно отобразить графики отклика Cbase с графиками отклика спроектированного контроллера путем нажатия на флажок Show baseline в PID Tuner.
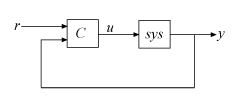
Если type или Cbase задает одну степень свободы (1-DOF) ПИД-регулятор, затем pidTuner проектирует контроллер для модульной обратной связи, как проиллюстрировано:

Если type или Cbase задает две степени свободы (2-DOF) ПИД-регулятор, затем pidTuner проектирует контроллер 2-DOF как в обратной связи этого рисунка:
PID Tuner имеет целевой запас по фазе по умолчанию 60 градусов и автоматически настраивает коэффициенты ПИД, чтобы сбалансировать производительность (время отклика) и робастность (запасы устойчивости). Используйте Response time или Bandwidth и ползунки Phase Margin, чтобы настроить производительность диспетчера на ваши требования. Увеличение производительности обычно уменьшает робастность, и наоборот.
Выберите графики отклика из меню Response, чтобы анализировать производительность диспетчера.
Если вы обеспечиваете Cbase, проверяйте Show baseline, чтобы отобразить ответ базового контроллера.
Для более подробной информации об использовании PID Tuner смотрите ПИД-регуляторы Разработки с PID Tuner.
Для интерактивного ПИДа, настраивающего Live Editor, смотрите Live Editor ПИД-регулятора Мелодии задача. Эта задача позволяет вам в интерактивном режиме спроектировать ПИД-регулятор и автоматически генерирует код MATLAB® для вашего live скрипта.
Для получения информации об алгоритме настройки ПИДа MathWorks® смотрите Алгоритм настройки ПИДа.
Можно открыть PID Tuner с рабочего стола MATLAB во вкладке Apps. Когда вы сделаете так, используйте меню Plant в PID Tuner, чтобы задать вашу модель объекта управления.
Для ПИДа, настраивающегося в командной строке, используйте pidtune. pidtune команда может спроектировать контроллер для нескольких объектов целиком.
Для интерактивного ПИДа, настраивающего Live Editor, смотрите Live Editor ПИД-регулятора Мелодии задача. Эта задача позволяет вам в интерактивном режиме спроектировать ПИД-регулятор и автоматически генерирует код MATLAB для вашего live скрипта.
Åström, K. J. и Hägglund, T. Усовершенствованное управление ПИДом, Ресерч-Трайэнгел-Парк, NC: инструментирование, системы и общество автоматизации, 2006.
