Время нарастания, время урегулирования и другие характеристики переходного процесса
S = stepinfo(sys)sys динамической системы. Функция возвращает характеристики в структуре, содержащей поля:
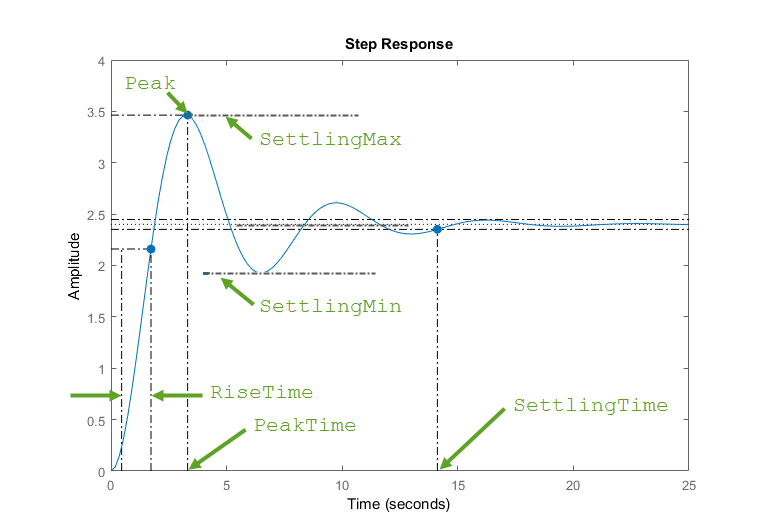
RiseTime — Время это берет для ответа, чтобы повыситься с 10% до 90% установившегося ответа.
SettlingTime — Время это берет для ошибки |y (t) - yfinal | между ответом y (t) и установившимся ответом yfinal, чтобы упасть на в 2% yfinal.
SettlingMin — Минимальное значение y (t) однажды ответ повысилось.
SettlingMax — Максимальное значение y (t) однажды ответ повысилось.
Overshoot — Перерегулирование процента, относительно yfinal).
Undershoot — Отклонение от номинала процента.
Peak — Пиковое абсолютное значение y (t)
PeakTime — Время, в которое происходит пиковое значение.
Следующая фигура иллюстрирует некоторые из этих количеств на типичном ответе второго порядка.
Используя этот синтаксис требует лицензии Control System Toolbox™.
S = stepinfo(y,t)y и соответствующий временной вектор t. Для откликов системы SISO, y вектор с тем же количеством записей как t. Для данных об ответе MIMO, y массив, содержащий ответы каждого канала ввода-вывода. Этот синтаксис использует последнее значение в y (или последнее значение в соответствующих данных об ответе каждого канала) как установившееся значение для вычислительных характеристик, которые зависят от того значения.
S = stepinfo(y,t,yfinal)yfinal. Этот синтаксис полезен, когда вы знаете, что ожидаемый установившийся отклик системы отличается от последнего значения в y по причинам, таким как шум измерения.
Для ответов SISO, t и y векторы с тем же NS длины. Для систем с входными параметрами NU и Нью-Йорком выходные параметры, можно задать y как NS Нью-Йорком массивом NU (см. step) и yfinal как массив Нью-Йорка ню. stepinfo затем возвращает массив структур Нью-Йорка ню S из показателей производительности для каждой пары ввода-вывода.
S = stepinfo(___,'SettlingTimeThreshold',ST)ST используемый в определении времени урегулирования. Ответ обосновался когда ошибка |y(t) - yfinal| становится меньшим, чем дробный ST из его пикового значения. Значением по умолчанию является ST = 0.02 (2%). Можно использовать этот синтаксис с любой из предыдущих комбинаций входных аргументов.
S = stepinfo(___,'RiseTimeLimits',RT)RT = [0.1 0.9]). Верхний порог RT(2) также используется, чтобы вычислить SettlingMin и SettlingMax. Эти значения являются минимальными и максимальными значениями ответа, происходящего после того, как ответ достиг верхнего порога. Можно использовать этот синтаксис с любой из предыдущих комбинаций входных аргументов.
Вычислите характеристики переходного процесса, такие как время нарастания, время урегулирования и перерегулирование для модели динамической системы. В данном примере используйте передаточную функцию непрерывного времени:
Создайте передаточную функцию и исследуйте ее переходной процесс.
sys = tf([1 5 5],[1 1.65 5 6.5 2]); step(sys)

График показывает, что повышения ответа за несколько секунд, и затем звонят вниз к установившемуся значению приблизительно 2,5. Вычислите характеристики этого ответа с помощью stepinfo.
S = stepinfo(sys)
S = struct with fields:
RiseTime: 3.8456
SettlingTime: 27.9762
SettlingMin: 2.0689
SettlingMax: 2.6873
Overshoot: 7.4915
Undershoot: 0
Peak: 2.6873
PeakTime: 8.0530
По умолчанию время урегулирования является временем, для которого требуется упасть ниже 2% его пикового значения, где отклик системы во время t и установившийся ответ. Результат S.SettlingTime показывает это для sys, это условие происходит приблизительно после 28 секунд. Определением по умолчанию времени нарастания является время, которое требуется для ответа, чтобы пойти от 10% его установившегося значения к 90% того значения. S.RiseTime показывает это для sys, это повышение происходит меньше чем за 4 секунды. Максимальное перерегулирование возвращено в S.Overshoot. Для этой системы, пиковое значение S.Peak, который происходит в то время S.PeakTime, промахивается по установившемуся значению приблизительно 7,5% установившегося значения.
Для системы MIMO, stepinfo возвращает массив структур, в котором каждая запись содержит характеристики ответа соответствующего канала ввода-вывода системы. В данном примере используйте 2D выход, 2D входную систему дискретного времени. Вычислите характеристики переходного процесса.
A = [0.68 -0.34; 0.34 0.68]; B = [0.18 -0.05; 0.04 0.11]; C = [0 -1.53; -1.12 -1.10]; D = [0 0; 0.06 -0.37]; sys = ss(A,B,C,D,0.2); S = stepinfo(sys)
S=2×2 struct array with fields:
RiseTime
SettlingTime
SettlingMin
SettlingMax
Overshoot
Undershoot
Peak
PeakTime
Доступ к характеристикам ответа для конкретного I/0 образовывает канал путем индексации в S. Например, исследуйте характеристики ответа на ответ от первого входа до второго выхода sys, соответствие S(2,1).
S(2,1)
ans = struct with fields:
RiseTime: 0.4000
SettlingTime: 2.8000
SettlingMin: -0.6724
SettlingMax: -0.5188
Overshoot: 24.6476
Undershoot: 11.1224
Peak: 0.6724
PeakTime: 1
Чтобы получить доступ к особому значению, используйте запись через точку. Например, извлеките время нарастания эти (2,1) канал.
rt21 = S(2,1).RiseTime
rt21 = 0.4000
По умолчанию, stepinfo задает время урегулирования как время, которое требуется для ошибки между ответом и установившийся ответ прибыть в 2% . Кроме того, stepinfo задает время нарастания как время, которое требуется для ответа, чтобы повыситься с 10% к 90% . Можно изменить эти определения с помощью SettlingTimeThreshold и RiseTimeThreshold. В данном примере используйте систему, данную:
Создайте передаточную функцию.
sys = tf([1 5 5],[1 1.65 5 6.5 2]);
Вычислите время, которое требуется для ошибки в ответе sys к достигнуть 0,5% установившегося ответа. Для этого установите SettlingTimeThreshold к 0,5%, или 0.005.
S1 = stepinfo(sys,'SettlingTimeThreshold',0.005);
st1 = S1.SettlingTimest1 = 46.1325
Вычислите время, оно берет ответ sys повыситься с 5% до 95% установившегося значения. Для этого установите RiseTimeThreshold к вектору, содержащему те границы.
S2 = stepinfo(sys,'RiseTimeThreshold',[0.05 0.95]);
rt2 = S2.RiseTimert2 = 4.1690
Можно задать и время урегулирования и время нарастания в том же расчете.
S3 = stepinfo(sys,'SettlingTimeThreshold',0.005,'RiseTimeThreshold',[0.05 0.95])
S3 = struct with fields:
RiseTime: 4.1690
SettlingTime: 46.1325
SettlingMin: 2.0689
SettlingMax: 2.6873
Overshoot: 7.4915
Undershoot: 0
Peak: 2.6873
PeakTime: 8.0530
Можно извлечь характеристики переходного процесса из данных переходного процесса, даже если у вас нет модели вашей системы. Например, предположите, что вы измерили ответ своей системы к входу шага и сохранили получившиеся данные об ответе в векторном y из значений ответа во времена, сохраненные в другом векторе, t. Загрузите данные об ответе и исследуйте их.
load StepInfoData t y plot(t,y)

Вычислите характеристики переходного процесса из этих данных об ответе с помощью stepinfo. Если вы не задаете установившееся значение ответа yfinal, затем stepinfo принимает что последнее значение в векторе отклика y установившийся response.Поскольку существует некоторый шум в данных, последнее значение в y вероятно не истинное установившееся значение ответа. Когда вы знаете, каково установившееся значение должно быть, можно предоставить его stepinfo. В данном примере предположите, что установившийся ответ 2.4.
S1 = stepinfo(y,t,2.4)
S1 = struct with fields:
RiseTime: 1.2713
SettlingTime: 19.6478
SettlingMin: 2.0219
SettlingMax: 3.3302
Overshoot: 38.7575
Undershoot: 0
Peak: 3.3302
PeakTime: 3.4000
Из-за шума в данных определение по умолчанию времени урегулирования является слишком строгим, приводя к произвольному значению почти 20 секунд. Чтобы допускать шум, увеличьте порог времени урегулирования со значения по умолчанию 2% к 5%.
S2 = stepinfo(y,t,2.4,'SettlingTimeThreshold',0.05)S2 = struct with fields:
RiseTime: 1.2713
SettlingTime: 10.4201
SettlingMin: 2.0219
SettlingMax: 3.3302
Overshoot: 38.7575
Undershoot: 0
Peak: 3.3302
PeakTime: 3.4000
