Создайте вид с высоты птичьего полета с помощью обратного перспективного отображения
Используйте birdsEyeView объект создать вид с высоты птичьего полета на 2D сцену с помощью обратного перспективного отображения. Чтобы преобразовать изображение в вид с высоты птичьего полета, передайте birdsEyeView возразите и то изображение против transformImage функция. Чтобы преобразовать координаты вида с высоты птичьего полета изображений в или от координат транспортного средства, используйте imageToVehicle и vehicleToImage функции. Все эти функции принимают, что входное изображение не имеет искажения объектива. Чтобы удалить искажение объектива, используйте undistortImage функция.
birdsEye = birdsEyeView(sensor,outView,outImageSize) создает birdsEyeView объект для преобразования изображения к виду с высоты птичьего полета.
sensor monoCamera объект, который задает настройку датчика камеры. Этот вход устанавливает Sensor свойство.
outView задает фрагмент поля зрения камеры, в координатах транспортного средства, который преобразовывается в вид с высоты птичьего полета. Этот вход устанавливает OutputView свойство.
outImageSize задает размер, в пикселях, выходного изображения вида с высоты птичьего полета. Этот вход устанавливает ImageSize свойство.
Sensor — Настройка датчика камерыmonoCamera объектНастройка датчика камеры в виде monoCamera объект. Объект содержит внутренние параметры камеры, монтирующуюся высоту и углы монтирования камеры. Эта настройка задает систему координат транспортного средства birdsEyeView объект. Для получения дополнительной информации смотрите Систему координат Транспортного средства.
OutputView — Координаты области, чтобы преобразоватьКоординаты области, чтобы преобразовать в вид с высоты птичьего полета отображают в виде четырехэлементного вектора формы [xmin
xmax
ymin
ymax]. Модули находятся в мировых координатах, таких как метры или футы, как определено Sensor свойство. Четыре координаты задают выходной пробел в системе координат транспортного средства (X V, Y V).

Можно установить это свойство, когда вы создаете объект. После того, как вы создадите объект, это свойство только для чтения.
ImageSize — Размер выходных изображений вида с высоты птичьего полетаРазмер выходных изображений вида с высоты птичьего полета, в пикселях в виде двухэлементного вектора формы [m
n], где m и n задают количество строк и столбцов пикселей для выходного изображения, соответственно. Если вы задаете значение для одной размерности, можно установить другую размерность на NaN и birdsEyeView вычисляет это значение автоматически. Установка одной размерности к NaN обеспечивает тот же пиксель к отношению мировой единицы измерения вдоль V-оси X и V-оси Y.
Можно установить это свойство, когда вы создаете объект. После того, как вы создадите объект, это свойство только для чтения.
transformImage | Преобразуйте изображение к виду с высоты птичьего полета |
imageToVehicle | Преобразуйте координаты вида с высоты птичьего полета изображений, чтобы транспортировать координаты |
vehicleToImage | Преобразуйте координаты транспортного средства в координаты вида с высоты птичьего полета изображений |
Создайте изображение вида с высоты птичьего полета из изображения, полученного обращенной к передней стороне камерой, смонтированной на транспортном средстве. Отобразите точки в виде с высоты птичьего полета с помощью транспортного средства и отобразите системы координат.
Задайте внутренние параметры камеры и создайте объект, содержащий эти внутренние параметры.
focalLength = [309.4362 344.2161]; principalPoint = [318.9034 257.5352]; imageSize = [480 640]; camIntrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
Установите высоту камеры составлять приблизительно 2 метра над землей. Установите подачу камеры до 14 градусов к земле.
height = 2.1798; pitch = 14;
Создайте объект, содержащий настройку камеры.
sensor = monoCamera(camIntrinsics,height,'Pitch',pitch);Задайте область перед камерой, которую вы хотите преобразовать в вид с высоты птичьего полета. Установите область от 3 до 30 метров перед камерой с 6 метрами любой стороне камеры.
distAhead = 30; spaceToOneSide = 6; bottomOffset = 3; outView = [bottomOffset,distAhead,-spaceToOneSide,spaceToOneSide];
Установите ширину выходного изображения на 250 пикселей. Вычислите продолжительность выхода автоматически из ширины путем установки длины на NaN.
outImageSize = [NaN,250];
Создайте объект для выполнения вида с высоты птичьего полета, преобразовывает, с помощью ранее заданных параметров.
birdsEye = birdsEyeView(sensor,outView,outImageSize);
Загрузите изображение, которое было получено датчиком.
I = imread('road.png'); figure imshow(I) title('Original Image')
![]()
Преобразуйте входное изображение в изображение вида с высоты птичьего полета.
BEV = transformImage(birdsEye,I);
В изображении вида с высоты птичьего полета поместите 20-метровый маркер непосредственно перед датчиком. Используйте vehicleToImage функция, чтобы задать местоположение маркера в координатах транспортного средства. Отобразите маркер на изображении вида с высоты птичьего полета.
imagePoint = vehicleToImage(birdsEye,[20 0]); annotatedBEV = insertMarker(BEV,imagePoint); annotatedBEV = insertText(annotatedBEV,imagePoint + 5,'20 meters'); figure imshow(annotatedBEV) title('Bird''s-Eye-View Image: vehicleToImage')
![]()
Задайте местоположение в исходном изображении вида с высоты птичьего полета, на этот раз в координатах изображений. Используйте imageToVehicle функционируйте, чтобы преобразовать координаты изображений, чтобы транспортировать координаты. Отобразите расстояние между маркером и передней стороной транспортного средства.
imagePoint2 = [120 400]; annotatedBEV = insertMarker(BEV,imagePoint2); vehiclePoint = imageToVehicle(birdsEye,imagePoint2); xAhead = vehiclePoint(1); displayText = sprintf('%.2f meters',xAhead); annotatedBEV = insertText(annotatedBEV,imagePoint2 + 5,displayText); figure imshow(annotatedBEV) title('Bird''s-Eye-View Image: imageToVehicle')
![]()
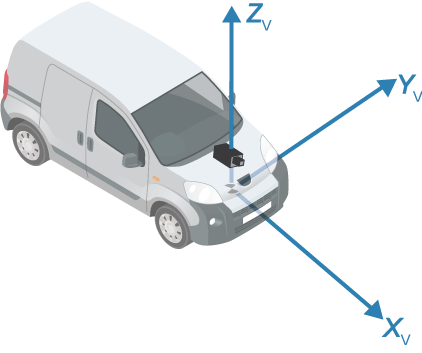
В системе координат транспортного средства (X V, Y V, Z V) заданный входом monoCamera объект:
V-ось X указывает вперед от транспортного средства.
V-ось Y указывает налево, как просматривается при направлении вперед.
V-ось Z подчеркивает от земли, чтобы обеспечить правую систему координат.
Источник по умолчанию этой системы координат находится на дорожном покрытии, непосредственно ниже центра камеры. Центр камеры задает эту центральную точку.
Чтобы изменить размещение источника в системе координат транспортного средства, обновите SensorLocation свойство входа monoCamera объект.
Для получения дополнительной информации о системе координат транспортного средства, смотрите Системы координат в Automated Driving Toolbox.
